
Fターム[5F031JA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 光センサ (2,240)
Fターム[5F031JA02]の下位に属するFターム
ラインセンサ (93)
エリアセンサ、カメラ (579)
透過光検出 (318)
反射光検出 (743)
光路の形成 (91)
Fターム[5F031JA02]に分類される特許
81 - 100 / 416
ステージ装置、露光装置、露光方法及びデバイスの製造方法
【課題】剛性を維持しつつ軽量化を図ること。
【解決手段】基板を保持して移動するステージ部と、当該ステージ部を駆動する駆動機構とを備え、ステージ部及び駆動機構のうち少なくとも一部に、炭化ホウ素、炭化ホウ素並びに炭化ケイ素の混合物、及び、炭化ケイ素並びに炭素の混合物、のうち少なくとも1つの材料が用いられる。
(もっと読む)
基板処理方法、及び基板処理装置

【課題】不良デバイスの発生を抑制でき、デバイスの生産性の低下を抑制できる基板処理方法を提供する。
【解決手段】保持部に搬送された基板に対して第1手順に対応した第1処理を実行する基板処理方法は、保持部に搬送された基板の歪みに関する情報を検出することと、歪みに関する情報に基づいて、基板に対して第1処理と異なる第2処理の要否を判断することと、を含む。
(もっと読む)
計測装置、露光装置およびデバイス製造方法
【課題】エンコーダシステムを用いたステージを位置決めする場合、スケール間に存在する幾何学的誤差に起因する計測誤差を低減する。
【解決手段】可動体に配置された複数のセンサと、構造体に取り付けられた複数のスケールとを有し、前記可動体の変位を検出することによって前記可動体の位置を計測する計測装置であって、前記複数のスケールは、第1方向における前記可動体の変位を検出するための2つの第1スケールと、前記第1方向とは異なる第2方向における前記可動体の変位を検出するための2つの第2スケールとを含み、2つのセンサによる検出値とが等しくなるように前記可動体を前記第1位置から前記第2位置に移動させたときに前記2つの第1スケールに対向している2つのセンサによってそれぞれ検出される変位の間の差に基づいて、前記2つの第1スケールの間に存在する幾何学的誤差に起因する計測誤差を低減する制御部とを備える。
(もっと読む)
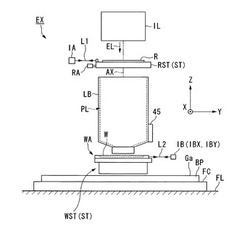
位置検出装置、露光装置及びデバイスの製造方法
【課題】基板の位置合わせ(ウエハアライメント)を短時間で行うことができる技術を提供する。
【解決手段】ステージ50に保持された基板40に形成されたマークからの光を検出する複数の領域が第1の方向に配列されたセンサ704と、ステージを駆動する第1の駆動部60と、センサに入射するマークAMからの光が第1の方向に沿って移動しながら、複数の領域に順に入射するように、ステージを基板の高さ方向に直交する第2の方向に駆動しつつ、ステージを基板の高さ方向にも駆動するように、第1の駆動部を制御する制御部80と、センサからの信号を処理する処理部90と、を有し、処理部は、信号によって与えられる第1の方向に沿った光強度の分布において、ピークを示す基板の高さ方向の位置を決定することを特徴とする。
(もっと読む)
ロードロック装置及び処理システム
【課題】冷却効率を高めてスループットを高く維持でき、複数段の被処理体を面間の温度差が生じないように均一に冷却するロードロック装置を提供する。
【解決手段】真空室6と大気室12との間にゲートバルブを介して連結されると共に真空雰囲気と大気圧雰囲気とを選択的に実現することができるロードロック装置8,10において、ロードロック用容器34と、ロードロック用容器内に設けられて複数枚の被処理体を複数段に亘って支持する支持部52を有する支持手段50と、大気圧復帰用のガスを冷却ガスとして噴射するために支持部に対応させて設けられたガス噴射孔74を有するガス導入手段72と、ロードロック用容器内の雰囲気を真空引きする真空排気系42とを備える。これにより、冷却効率を高めてスループットを高く維持でき、且つ複数段の被処理体を面間の温度差が生じないように均一に冷却する。
(もっと読む)
物体処理装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】基板の対する処理を高精度で行う。
【解決手段】 基板Pの下方には、基板Pの下面にエアを噴出する複数のエア浮上ユニット50が配置され、基板Pは、概ね水平となるように非接触支持される。また、基板Pは、定点ステージ40により被露光部位が下方から非接触保持され、その被露光部位の面位置がピンポイントで調整される。従って、基板Pに高精度で露光を行うことができ、かつ基板ステージ装置PSTの構成を簡単にすることができる。
(もっと読む)
露光装置及びデバイス製造方法
【課題】マスクの清浄化に有利な露光装置を提供する。
【解決手段】本発明の露光装置は、マスク1を介して基板を露光する露光装置であって、マスク1のクリーン化を行うステーション部(露光室43等)と、マスク1のクリーン化を行うクリーン化ユニット(異物検査装置7、異物除去装置8−1、異物付着防止装置24)をステーション部に搬送するマスクハンドリング部9とを有する。
(もっと読む)
位置決めシステム、リソグラフィ装置及び方法
【課題】オブジェクトの本体の剛性の増加及び/又は制振によって可撓性及びその結果としての内部変形を低減する。
【解決手段】 本体を有する可動オブジェクトを位置決めする位置決めシステムであって、位置決めシステムが、オブジェクト位置測定システムと、オブジェクトアクチュエータと、オブジェクトコントローラとを含み、位置決めシステムが、オブジェクトの本体内の剛性を増加させ、及び/又は相対運動を制振するスティフナーをさらに含み、スティフナーが、各々が本体の内部歪み又は相対変位を表す測定信号を決定するように配置された1つ又は複数のセンサと、各々が本体の一部に作動力を加えるように配置された1つ又は複数のアクチュエータと、センサのうちの少なくとも1つのセンサの測定信号に基づいて、アクチュエータの少なくとも1つに作動信号を提供して本体内の剛性を増加させ、及び/又は運動を制振するように構成された少なくとも1つのコントローラとを含む位置決めシステム。
(もっと読む)
基板搬送装置および基板貼り合わせ装置
【課題】基板搬送装置には、搬送時の振動等による半導体基板およびこれを保持する基板ホルダの脱落を防止する機構が必要となる。しかし、脱落防止機構の駆動は発塵の原因となる。
【解決手段】基板を保持する基板ホルダを搬送する基板搬送装置は、基板ホルダを載置する載置部と、載置部に載置された基板ホルダが保持する基板に対して、載置部と同じ側に配置された回転軸と、回転軸の軸周りに回動して、基板ホルダの脱落を防止する防止位置と、基板ホルダを開放するための開放位置を取り得る開閉ロック機構と、載置部、回転軸および開閉ロック機構を一体的に上下反転させる反転部とを備える。
(もっと読む)
基板移送装置
【課題】クランプ時に基板に無理な力が生じることにより発生する課題を解決する装置の提供。
【解決手段】大型ガラス基板等の基板0をその保持高さを精密に維持しつつ面内方向に自由に移動できるように案内する基板案内手段と、当該基板案内手段に保持された前記基板を面内の特定の方向に移動させるための基板駆動手段とを具備してなり、基板駆動手段が、大型ガラス基板等の基板を把持するための複数のクランプ部と、これらのクランプ部を同期させて駆動することにより、基板を基板案内手段に保持させつつ、特定方向に移動させ位置決めを行う基板駆動部とを具備してなる基板移送装置4において、クランプ部21により基板0をクランプした際に、その基板0に無理な力が作用しないように、クランプ部21を基板0の面外方向に逃がすための逃がし機構59をさらに備える。
(もっと読む)
基板ID読み取り機構及びそれを用いた基板搬送装置、並びに基板ID読み取り方法
【課題】基板位置や基板表面の状態によらず、基板IDを迅速かつ正確に読み取ることができるアライナ装置を提供する。
【解決手段】基板の表面に設けられた基板IDを読み取る基板ID読み取り装置と、基板搬送時における基板の偏心量を計測し基板のアライメントを行うアライナとを備え、基板の偏心量を計測しアライメントを行う際に、基板IDを読み取る基板ID読み取り機構において、基板ID読み取り装置は、基板の偏心量に基づいて基板IDの位置を算出し、その算出した基板IDの位置に基づいて予め設定された複数のID読み取り条件の中から基板IDを読み取り可能な条件を抽出し、その抽出した基板ID読み取り可能条件を用いて基板IDを読み取る構成とした。
(もっと読む)
保護テープの剥離装置
【課題】基板表面の保護テープを剥離する際の剥離テープの使用量削減と共に剥離ミス時に自動復帰できる保護テープ剥離装置を提供する。
【解決手段】基板2表面の保護テープ4を剥離テープ5で剥離する保護テープ剥離装置において、基板2を保持する剥離テーブル10と、ロール状剥離テープ5の供給手段11と、テープ巻取手段12と、貼付ローラー27と、保護テープ4の剥離前端側に剥離テープ5を貼付けた後、剥離テープ5の貼付け後方側を切断するカッター32と、剥離テープ5を保持するカッター台29と、剥離テープ5を後方で保持する剥離テープ保持機構25とを備え、剥離テープ5を保護テープ4の剥離前端側に貼付けて保護テープ4を剥離すると共に剥離テープ5の貼付け後方側をカッター32で切断し、切断後方側の剥離テープ5前端部を保護テープ4の剥離後端側に貼付けて保護テープ4を剥離テープ5で連結しながら剥離する保護テープ剥離装置。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】基板テーブル及び/又は支持体の位置決めの精度を改良する
【解決手段】リソグラフィ装置は、放射ビームを調整するように構成された照明システムと、放射ビームの断面にパターンを与えてパターン付き放射ビームを形成することができるパターニングデバイスを支持するように構築された支持体と、基板を保持するように構築された基板テーブルと、パターン付き放射ビームを基板のターゲット部分に投影するように構成された投影システムと、を含む。基板テーブル及び/又は支持体は、基板テーブル及び/又は支持体の加速度を測定する加速度計を備え、装置は、加速度計と通信し、加速度計によって測定された加速度から加速度に基づく位置信号を計算するカルキュレータを備える。
(もっと読む)
ワーク搬送ロボット
【課題】ロボット本体およびアーム相互間の成す角度を各々光学的に正確に検出することにより、最終的な搬送位置のズレを生じさせないようにしたワーク搬送ロボットを提供する。
【解決手段】ロボット本体と、該ロボット本体に対して順次関節部を介して相対回動可能に連接された複数のアームと、該複数のアームの先端側アームに相対回動可能に取付けられたリストブロックと、上記複数のアームの各々を回動作動する連係手段と、上記連係手段を所定の連係関係で駆動する駆動手段とを備えてなるワーク搬送ロボットであって、上記ロボット本体および複数のアーム間の各関節部には、ロボット本体およびアーム相互の相対的な回転角度情報を示す角度情報表示部42と、該角度情報表示部の角度情報を光学的に読み取る光学センサー51とを設け、上記各関節部の連結軸を介して相互に相対回動するロボット本体およびアーム相互の実際の回転角を検出できるようにした。
(もっと読む)
エンドエフェクタ、ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】ウェーハの搬送時において、エンドエフェクタにウェーハを載置している間に、エンドエフェクタに対するウェーハの載置位置を検出することができるエンドエフェクタ及びそれを用いたウェーハ搬送ロボット、並びにそれを備えたウェーハ搬送装置を提供する。
【解決手段】ウェーハを搬送するウェーハ搬送ロボットのアームに取り付けられウェーハを保持するエンドエフェクタにおいて、エンドエフェクタに対するウェーハの位置ずれを検出するために、エンドエフェクタのひずみを検出するひずみセンサを少なくとも1つ備えた。特に、ひずみセンサは3つ設けられ、そのうち1つのひずみセンサは、エンドエフェクタの中心線上に配置され、他の2つのひずみセンサは、中心線に対して互いに線対称となる位置に配置される構成とした。
(もっと読む)
アダプタユニット内蔵ローダ室
【課題】従来のようにカセット等の容器とアダプタユニットの切換作業をすることなく、被検査体の非自動搬送及び自動搬送に対応させることができるアダプタユニット内蔵型ローダ室を提供する。
【解決手段】本発明のローダ室10は、カセット載置部11とは別のバッファテーブル配置部13に半導体ウエハWを自動搬送するRGV40に対応して設けられ、RGV40及びプローバ室20それぞれとの間で搬送される半導体ウエハWを複数保持するアダプタユニットを備えている。
(もっと読む)
半導体ウエハのプリアライメント方法及びプリアライメント用プログラム
【課題】プリアライメントに要する時間を短縮し、半導体ウエハの処理部への半導体ウエハの搬送時間を短縮することができる半導体ウエハのプリアライメント方法を提供する。
【解決手段】本発明のプリアライメント方法は、ウエハ搬送機構5を用いてカセットCからプリアライメント機構6の回転体6A上へ移載した半導体ウエハWを回転させる第1の工程と、プリアライメント機構6の光学センサ6C及び制御装置3を用いて回転体6Aの軸芯と半導体ウエハWの中心との偏芯量を演算し、演算値を保存する第2の工程と、演算値が規定値を超える時には、ウエハ搬送機構5を用いて半導体ウエハWの回転体6A上での位置ズレを演算値の示す偏芯量だけ補正する第3の工程と、所定枚数以降の半導体ウエハWをプリアライメントする時には、それまでに蓄積された各半導体ウエハWの演算値に基づいて半導体ウエハWの偏芯量を予測する第4の工程と、を備えている。
(もっと読む)
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】 粗微動ステージにおいて、微動ステージの位置を高精度に計測する。
【解決手段】 粗動ステージWCSに保持された微動ステージWFSのXY平面内での位置情報の計測には、微動ステージのXY平面に実質的に平行な一面に配置されたグレーティングRGに対向して配置され、該グレーティングに計測ビームを照射するヘッドを含むエンコーダシステムが用いられる。そして、微動ステージは、駆動系によって、エンコーダシステムで計測された位置情報に基づいて、単独で、若しくは粗動ステージと一体で駆動される。この場合、エンコーダシステムのヘッドを微動ステージ(グレーティング)に近接して配置することができ、これにより、エンコーダシステムによる微動ステージの位置情報の高精度な計測が可能になる。
(もっと読む)
基板処理システム
本発明の実施形態は、再現可能かつ正確な基板処理を維持しながら、システム処理量を増大させ、システム稼働時間を改善し、かつデバイス歩留り性能を改善した処理システム内で基板を処理する装置および方法を提供する。システムは、システム制御装置によって制御される複数の平面の移動子を介して平面のモータを使用することによって横方向に位置決めできる複数の処理ネストを含むことができる。各処理ネストによって支持される基板は、回転アクチュエータによってその角度を決定できる。システムは、とりわけ、スクリーン印刷、インクジェット印刷、熱処理、デバイス試験、および材料除去プロセスに使用することができる。  (もっと読む)
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】エンコーダタイプの位置測定システムのグリッドプレート内の欠陥を判定する。
【解決手段】別のオブジェクトに対する可動オブジェクトの位置を測定するエンコーダタイプの位置測定システムを提供するステップであって、前記エンコーダタイプの位置測定システムが、グリッドプレートとエンコーダヘッドとを含むステップと、2つ以上の検出器の各々に反射した光の量を測定するステップと、2つ以上の検出器に反射した放射ビームの結合放射ビーム強度を用いて測定位置でのグリッドプレートの反射率を表す反射率信号を決定するステップと、グリッドプレートの反射率信号に基づいて測定位置の欠陥の存在を判定するステップとを含む方法を提供する。
(もっと読む)
81 - 100 / 416
[ Back to top ]