
Fターム[5F031JA32]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出する情報 (3,081) | 寸法の情報(距離、厚さ、角度等) (564)
Fターム[5F031JA32]に分類される特許
161 - 180 / 564
基板移送装置
【課題】クランプ時に基板に無理な力が生じることにより発生する課題を解決する装置の提供。
【解決手段】大型ガラス基板等の基板0をその保持高さを精密に維持しつつ面内方向に自由に移動できるように案内する基板案内手段と、当該基板案内手段に保持された前記基板を面内の特定の方向に移動させるための基板駆動手段とを具備してなり、基板駆動手段が、大型ガラス基板等の基板を把持するための複数のクランプ部と、これらのクランプ部を同期させて駆動することにより、基板を基板案内手段に保持させつつ、特定方向に移動させ位置決めを行う基板駆動部とを具備してなる基板移送装置4において、クランプ部21により基板0をクランプした際に、その基板0に無理な力が作用しないように、クランプ部21を基板0の面外方向に逃がすための逃がし機構59をさらに備える。
(もっと読む)
基板搬送装置および基板貼り合わせ装置

【課題】一般的に基板ホルダは基板に比べて非常に重いので、基板ホルダを基板搬送装置で搬送しようとすると、搬送装置の基台部から先端に位置する把持部にかけての伸縮アームに自重撓みを生じてしまう。自重撓みを生じると基板ホルダが水平に保たれず、搬送先であるステージに対して傾斜した姿勢となってしまう。
【解決手段】基板を保持する基板ホルダを搬送する基板搬送装置であって、基板ホルダを載置し固定する載置部と、載置部を水平軸周りに揺動可能に支持する回転軸と、回転軸に対して載置部と一体的に揺動するバランスウェイトと、回転軸を支持するアーム部と、アーム部を回転させることにより、載置部、回転軸およびバランスウェイトを一体的に上下反転させる反転部とを備え、バランスウェイトは、反転部によりアーム部が上下反転されても、載置部が固定する基板ホルダが水平を保つように設置される。
(もっと読む)
基板搬送装置および基板貼り合わせ装置
【課題】基板搬送装置には、搬送時の振動等による半導体基板およびこれを保持する基板ホルダの脱落を防止する機構が必要となる。しかし、脱落防止機構の駆動は発塵の原因となる。
【解決手段】基板を保持する基板ホルダを搬送する基板搬送装置は、基板ホルダを載置する載置部と、載置部に載置された基板ホルダが保持する基板に対して、載置部と同じ側に配置された回転軸と、回転軸の軸周りに回動して、基板ホルダの脱落を防止する防止位置と、基板ホルダを開放するための開放位置を取り得る開閉ロック機構と、載置部、回転軸および開閉ロック機構を一体的に上下反転させる反転部とを備える。
(もっと読む)
基板搬送用ロボットのカセットに対する制御方法
【課題】簡単なセンサレスティーチングによって、ロボットハンドによるカセット内の各段の基板の受け渡しを精度よく行える基板搬送用ロボットのカセットに対する制御方法を提供すること。
【解決手段】基板Wを複数段収納するカセット30と、カセット30の各段に対してロボットハンド50を用いて基板Wの受け渡しを行う基板搬送用ロボット70とを用意する。カセット30に収納される基板Wの最下段と最上段の基板Wの受渡位置にロボットハンド50を移動してそれらの受渡位置をロボットハンド50の位置情報として測定する。次に測定した基板Wの最下段と最上段の位置情報と、位置決め式とに基づいて、カセット30のその他の段に収納される基板Wに対するロボットハンド50の受渡位置の位置情報を算出する。そしてこれら位置情報を用いて、カセット30の各段に対してロボットハンド50を移動させることで基板Wの受け渡しを行う。
(もっと読む)
位置検出装置、位置検出方法および基板重ね合わせ装置
【課題】互いのウェハを位置合わせして重ね合わせるときに、ステージの回転量が所定量を超えてしまうと、ステージの正確な位置を把握することが困難となる。ステージの回転量が所定量を超えないように制御するには、そもそも最初にステージに置かれるウェハの位置を厳密に管理する必要がある。
【解決手段】位置検出装置は、第1基板に設けられた少なくとも2個の第1基板指標を一度の撮像動作により撮像する第1撮像ユニットと、第1撮像ユニットにより撮像された画像に基づいて第1基板指標の位置を計測することにより、第1基板の姿勢を測定する測定部とを備える。
(もっと読む)
保護テープ剥離装置
【課題】保護テープの剥離方向がいずれの方向であっても、適正な圧力でワークの表面の保護テープに剥離テープを貼着すること。
【解決手段】本発明のある実施の形態において、保護テープ剥離装置は、表面に保護テープ23が貼着されたワーク2を保持する保持手段1上にワーク2が保持されていない状態で、保護テープ23の剥離方向に応じた基準面の位置と圧着部材35との接触による通電を検知することによって剥離方向に応じた基準面の高さ位置を検出する高さ位置検出機構を備える。また、剥離方向に応じた基準面の高さ位置と、予め定められる剥離テープ31、ワーク2、ダイシングテープ22および保護テープ23の厚みとをもとに、下端面によって保護テープ23の非粘着面を押圧する際の圧着部材送り機構の駆動量を制御する制御手段を備える。
(もっと読む)
ステージ装置、露光装置及びデバイス製造方法
【課題】 レチクルのような板部材を強固に保持すると共に、板部材の上面、下面又は板部材を保持する部材に異物が付着していても板部材を歪ませることのないステージ装置を提供する。
【解決手段】 ステージ装置は、ステージと、前記ステージに設けられていて、前記板部材の下面に当接して前記板部材の面に垂直な方向における前記板部材を位置決めする第1位置決め部材と、前記ステージに設けられていて、前記板部材の上面に当接して前記第1位置決め部材と共に前記板部材の面に垂直な方向における前記板部材を位置決めする第2位置決め部材と、前記第1位置決め部材の周囲に第1密閉空間を形成する弾性を有する第1密閉部材と、前記第2位置決め部材の周囲に第2密閉空間を形成する弾性を有する第2密閉部材と、前記第1密閉空間と前記第2密閉空間とに前記板部材を真空吸着させるように、前記第1密閉空間及び前記第2密閉空間から空気をそれぞれ吸引する第1吸引機構及び第2吸引機構と、を備える。
(もっと読む)
搬送装置および搬送方法
【課題】被搬送物を搬送先にまで高精度に搬送することができる搬送装置および搬送方法を提供する。
【解決手段】基板トレイ搬送装置は、基板3を載せた基板トレイ17を搬送アーム26によって把持し、載置台5まで搬送する。搬送アーム26の先端部には、反射型光ファイバーセンサー25を有している。搬送アーム26は縁に到達する直前に減速する。その際、センサー25は載置台5の縁を検出する。搬送アーム26が減速しているので、センサー25による縁位置の検出は安定化する。制御装置37は、センサー25による縁位置の検出結果に基づき、載置台5の縁から載置台5の中心までの距離と、基板トレイ17からセンサー25までの距離とを加えた距離だけ、載置台5の縁から搬送アーム26を移動させるように、第一の移動機構28を制御する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】エンコーダタイプの位置測定システムのグリッドプレート内の欠陥を判定する。
【解決手段】別のオブジェクトに対する可動オブジェクトの位置を測定するエンコーダタイプの位置測定システムを提供するステップであって、前記エンコーダタイプの位置測定システムが、グリッドプレートとエンコーダヘッドとを含むステップと、2つ以上の検出器の各々に反射した光の量を測定するステップと、2つ以上の検出器に反射した放射ビームの結合放射ビーム強度を用いて測定位置でのグリッドプレートの反射率を表す反射率信号を決定するステップと、グリッドプレートの反射率信号に基づいて測定位置の欠陥の存在を判定するステップとを含む方法を提供する。
(もっと読む)
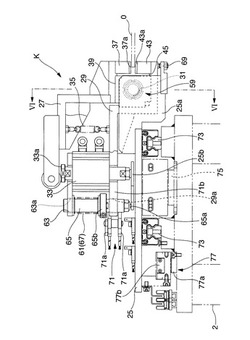
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体の位置情報を高精度で計測する。
【解決手段】 露光ステーション200では、ウエハを保持するステージWFS1の位置情報は、計測アーム71Aを含む第1の微動ステージ位置計測系により計測され、計測ステーション300では、ウエハを保持するステージWFS2の位置情報は、計測アーム71Bを含む第2の微動ステージ位置計測系により計測される。露光装置100は、ステージWFS2が計測ステーション300から露光ステーション200へ搬送される際、このステージWFS2の位置情報を計測可能な第3の微動ステージ計測系を有する。第3の微動ステージ計測系は、複数のYヘッド96,97を含むエンコーダシステムとレーザ干渉計76a〜76dを含むレーザ干渉計システムとを含む。
(もっと読む)
ステージ装置、及びステージ装置の制御方法、それを用いた露光装置及びデバイスの製造方法
【課題】コイルに流れる電流の遅れに起因して生じる、駆動すべき方向とは異なる方向への力を低減させる。
【解決手段】コイル4、及び複数の永久磁石を有するリニアモータと、コイル4に電流を供給する電流ドライバ9と、該電流ドライバ9への指令を生成する制御手段7とを備えたステージ装置であって、制御手段7は、コイル4と永久磁石との相対位置に基づいて算出した電気角を用いた正弦波を、リニアモータへの推力指令値に乗ずるコミュテーション処理により指令を生成し、更に、指令に対して、推力指令値に比例した振幅を持ち、かつ、正弦波と90度に位相がずれた正弦波の成分を含ませる。
(もっと読む)
基板搬送装置
【課題】 本発明は、カセットに収納された半導体ウエハ等の基板を所定の場所に移載する基板搬送装置に関し、カセット内においてウエハが所定位置に位置していない場合にもウエハの外周部を確実に保持することを目的とする。
【解決手段】 カセットに水平に収容される基板の奥行き方向の位置を検出する検出手段と、前記基板の下面の外周部を保持する保持部を備え前記基板を搬送する搬送手段と、前記奥行き方向の位置に基づいて前記基板の外周部が前記保持部に保持されるように前記搬送手段を制御する制御手段とを有することを特徴とする。
(もっと読む)
露光装置およびデバイス製造方法
【課題】高い位置合わせ精度を満たすために位置合わせ時間が増加した場合においても生産性を低下させない露光装置を提供する。
【解決手段】基板を保持して移動する基板ステージと、ショットのアライメントマークの位置を計測する位置計測手段と、基板の高さを計測する高さ計測手段と、を有し、これらの計測結果にしたがって基板ステージを位置決めして基板を露光する露光装置において、基板上の一部のショットに関してショット内の複数の計測箇所で高さ計測手段に高さの計測を行わせてショット表面の形状を算出し、各ショットのアライメントマークの位置を位置計測手段に計測させてショットの配列を算出し、アライメントマークの位置の計測に並行して高さの計測を行い基板の表面の形状を算出する処理手段を有する。
(もっと読む)
基板搬送装置
【課題】 本発明は、カセットに収納された半導体ウエハ等の基板を所定の場所に移載する基板搬送装置に関し、カセット内においてウエハが所定位置に位置していない場合にもウエハの外周部を確実に保持することを目的とする。
【解決手段】 基板の下面の外周部を保持する保持部をハンド部に備え前記基板を搬送する搬送手段と、前記ハンド部に設けられ、カセットに水平に収容される基板の奥行き方向の位置を検出する検出手段と、前記奥行き方向の位置に基づいて前記基板の外周部が前記保持部に保持されるように前記搬送手段を制御する制御手段とを有することを特徴とする。
(もっと読む)
ステージ装置、露光装置およびデバイス製造方法
【課題】 本体構造体の小型化を図ることで、露光装置全体の小型化を図る。
【解決手段】 本発明のステージ装置は、基板または原版を保持する保持部を有し、平面内を移動する可動体と、前記可動体に設けられ、前記保持部に基板または原版が保持された際に前記基板または原版よりも前記平面に垂直な方向に突出する反射面と、前記反射面に光を照射し、その反射光を用いて前記可動体の位置を計測する干渉計と、を備え、前記光は、前記反射面に対して、前記保持部が設けられた側から前記反射面に照射される。
(もっと読む)
電子部品の製造方法
【課題】本発明は、レーザー光照射による改質現象を用いた電子部品の製造方法における加工精度を向上させることを目的とする。
【解決手段】本発明は、要切断部12Aに沿って高さ認識用マーカー14を形成する第1の工程と、少なくとも高さ認識用マーカー14形成部に光を照射し、高さ認識用マーカー14形成部からの反射光の強度から高さ認識用マーカー14形成部の高さ情報を算出し記憶する第2の工程と、記憶された高さ認識用マーカー14形成部の高さ情報を用いてレーザー光の焦点距離を調整し、媒質12の要切断部12Aにレーザー光を照射して要切断部12Aを改質させる第3の工程とを有し、レーザー可動ライン11における高さ認識用マーカー非形成部14Bにおいてはレーザー可動ラインにおいて高さ認識用マーカー非形成部14Bの次に照射される高さ認識用マーカー形成部14Aの高さ情報を用いてレーザー光の焦点距離を事前調整しておくものである。
(もっと読む)
アライメントステージ
【課題】 移動荷重を受けるワークの高精度な位置補正を行う。
【解決手段】 ベース1の上方に、移動荷重が作用するワークを保持するトップテーブル4aを配置し、ベース1とトップテーブル4aとの間にて、荷重移動方向Lに千鳥配置となるトップテーブル4aの中央と四角部に対応する個所に、X、Y、θの3自由度を備えた支持ユニット13と、支持ユニット13と同様の構成に加えて一軸方向のボールねじ直動機構9を有する駆動ユニット14A,14B,14C,14Dを介装する。一方と他方の対角位置の駆動ユニット14A,14Bと14C,14Dは、ボールねじ直動機構9を直交配置させる。ワークを介してトップテーブル4aに荷重移動方向Lに移動しながら作用する移動荷重を、各駆動ユニット14A,14C、支持ユニット13、各駆動ユニット14B,14Dで連続的に受けることで、トップテーブル4aの変形を抑制させる。
(もっと読む)
基板処理装置
【課題】基板保持具の姿勢を検知することで、該基板保持具の傾きを起因とした該基板保持具と基板の破損を未然に防ぐ基板処理装置を提供する。
【解決手段】基板を処理する処理室と、該処理室で基板を保持する基板保持具14と、該基板保持具を載置する載置部と、該載置部に対して相対回転可能に設けられ相対回転により前記基板保持具を係合解除可能なロック部材と、該ロック部材と前記載置部とを相対回転させる回転部と、該回転部の回転動作を検出する検出部とを具備する。
(もっと読む)
半導体チップ供給装置のニードル管理装置
【課題】既存の装置以外には、専用センサ等のハードウエアを追加することなく、ニードル先端の状態を管理可能な半導体チップ供給装置のニードル管理装置を提供する。
【解決手段】この半導体チップ供給装置10の制御装置は、ニードル3の変形状態を管理するニードル状態管理処理を実行し、半導体チップCを認識するカメラ1で撮像されたニードル3の先端形状のエッジ情報と、予め設定された閾値情報とに基づいて、ニードル3の交換の要否を判別する。
(もっと読む)
浮上ユニット及び浮上装置
【課題】ワークの浮上高さのバラツキを抑えた浮上ユニット及び浮上装置を提供することを課題とする。
【解決手段】本発明に係る浮上ユニットは、空気が吸引される負圧室を形成しているチャンバと、チャンバの天井壁60に形成された横溝64及び縦溝62と、横溝64の溝底を貫通する気体供給管56と、天井壁60を貫通し負圧室と連通するように配設された吸気孔70と、天井壁60に固定され吸気孔70と連通する吸引孔を有する多孔質板と、を備えている。横溝64には、天井壁60の外周部60Eに向けて延び出して閉じている横閉溝64Sが配設されている。横閉溝64Sの溝先端64Tは他の溝には繋がっていない。本発明に係る浮上装置は、この浮上ユニットを並列に複数配置してなるものである。
(もっと読む)
161 - 180 / 564
[ Back to top ]