
Fターム[5F031NA05]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 雰囲気管理 (4,208) | 雰囲気 (2,327) | 真空 (1,240)
Fターム[5F031NA05]に分類される特許
41 - 60 / 1,240
搬送装置及びプラズマ処理システム
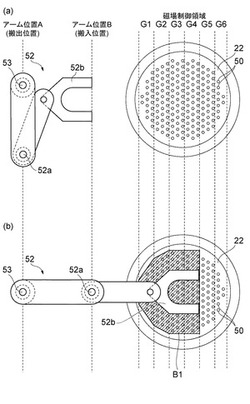
【課題】撓みによって生じる搬送アーム先端の下方への傾斜を低減することができる搬送装置及びプラズマ処理システムを提供する。
【解決手段】筐体内へ被搬送物を搬送する搬送装置である。搬送装置は、搬送アーム52、アーム軸53、複数の電磁石50及び制御部40を備えている。搬送アームは、被搬送物を載置するピック部52bを先端に有し、水平方向に伸縮する。アーム軸53は、搬送アーム52を支持する。複数の電磁石50は、筐体内部に磁場を発生させることにより搬送アーム52に上昇方向の力を作用させる。制御部40は、搬送アーム52が水平方向に伸縮する際にアーム軸53から搬送アーム52先端までの長さが長くなるほど搬送アーム52に作用させる上昇方向の力が大きくなるように複数の電磁石50を制御する。
(もっと読む)
ロボット、ロボットの設置方法および製造装置

【課題】チャンバ内への設置を容易に行うこと。
【解決手段】実施形態に係るロボットは、胴体部と、アームユニットとを備える。胴体部は、真空チャンバの上方から真空チャンバ内へ搬入されるとともに、真空チャンバへ固定される。また、アームユニットは、真空チャンバの上方から真空チャンバ内へ搬入されるとともに、真空チャンバ内へ固定された胴体部に対して連結される。
(もっと読む)
基板処理装置
【課題】光を用いて基板を処理する基板処理装置において、処理基板の大型化に対応することのできる技術を提供する。
【解決手段】基板を処理する処理室と、処理室内に設けられ基板を載置した状態で水平回転する基板載置部と、基板載置部に載置された基板に対向するように前記処理室外に設けられ処理室内へ光を照射する発光部と、処理室と発光部の間に設けられ処理室と発光部を隔てる仕切り部と、処理室内へ処理ガスを供給する処理ガス供給部と、処理室内の雰囲気を排気する排気部とを備えた基板処理装置において、仕切り部は、発光部から処理室内へ照射される光を透過する複数の透過窓と、該透過窓と透過窓との間に設けられ透過窓を固定する窓固定部とを備え、複数の透過窓のうち少なくとも1つの透過窓の面積は、基板の面積よりも小さくなるよう構成する。
(もっと読む)
ロボットのアーム構造およびロボット
【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
基板保持部材および当該半導体保持部材への半導体基板の取り付け位置調整方法
【課題】部材の位置合わせに係る工程数を減少させ、位置合わせに要する時間を短縮し、半導体製造装置の生産性を向上させる。
【解決手段】基板保持部材1は、半導体基板11を保持する保持面を備えたベース2と少なくとも1つの開口部を有していて保持面と対向するようにベース2上に支持されたマスク9とを備えている。さらに、基板保持部材1は、保持面とマスク9との間に、半導体基板11が挿通される基板挿通部14を備えている。
(もっと読む)
半導体装置の製造方法
【課題】EUVリソグラフィ用マスクの搬送時やマスクステージへの装着・脱離時に異物が発生する不具合を抑制することにより、半導体装置の製造歩留まりを向上させる。
【解決手段】マスク10をハンドラー30で保持して露光装置のマスクステージに搬送する際、予めマスク10の側面に永久磁石20、21を取り付けておく。また、ハンドラー30のアーム部32、33には、マスク10の永久磁石20、21との間に斥力が作用するように配置された電磁石34、35を取り付けておく。これにより、マスク10を搬送する際、ハンドラー30のアーム部32、33に挟まれたマスク10は、アーム部32、33と非接触状態となり、浮遊状態でハンドラー30に保持される。
(もっと読む)
真空処理装置および真空処理方法
【課題】位置ずれの量を抑制してダウンタイムを低減できる真空処理装置または真空処理方法を提供する。
【解決手段】内側が減圧される処理室及びこの処理室内に配置された試料台を有する真空容器と、この真空容器と連結されて前記ウエハを2つのアームの何れかに載せて搬入または搬出するロボットと、このロボットが前記ウエハを搬入または搬出する際にこのウエハの所定の位置のズレの量を検出する手段と、この検出されたズレの量に基づいて前記ロボットの動作を調節する調節器とを備え、前記調節器は、予めティーチングを行った結果に基づいて前記ロボットの動作を調節するものであって、前記ロボットが予めティーチングを行った後にウエハを所定のパターンで搬送した際に検出されたウエハの位置ズレの量の情報に基づいて再度のティーチングを行った後にウエハの処理を行う。
(もっと読む)
リソグラフィ装置及びデバイスの製造方法
【課題】投影光学系と基板との衝突の低減に有利なリソグラフィ装置を提供する。
【解決手段】ステージに保持された基板の上の複数の計測点の高さを計測する計測部と、基板を保持して前記光学系の光軸に平行な方向に第1ストロークで移動する微動ステージと、微動ステージを保持して光学系の光軸に平行な方向に第1ストロークより大きい第2ストロークで移動する調整ステージと、調整ステージが移動しないように機械的に調整ステージを固定する固定機構と、を含み、制御部は、基板に前記パターンを転写する前に、計測部で計測された複数の計測点の高さで代表される基板の仮想平面が水平になるように、且つ、仮想平面が光学系の最も基板側の面と基板との間であって第1ストロークから決まる初期位置に位置するように調整ステージを移動させ、仮想平面を初期位置に位置させた後に固定機構によって調整ステージを固定するリソグラフィ装置。
(もっと読む)
搬送機構
【課題】被処理体の自重により被処理体を保持して搬送することが可能な搬送機構を提供する。
【解決手段】被処理体を搬送する搬送機構24、64において、屈伸及び旋回が可能になされたアーム部26、28、66、68と、アーム部の先端に設けられて処理体を保持するピック部30、32、70、72と、ピック部に設けられて被処理体の周縁部と当接して被処理体の自重により揺動して周縁部を保持する複数の保持部材34とを備える。これにより、被処理体の自重により被処理体を保持して搬送可能する。
(もっと読む)
基板搬送装置、基板処理システムおよび基板搬送方法、ならびに記憶媒体
【課題】真空において熱をともなう処理を行う基板処理装置において、基板を高速で搬送しても基板の位置精度を高くすることができること。
【解決手段】熱をともなう真空処理が行われる真空処理ユニットに対して基板の搬入および搬出を行う基板搬送装置は、基板を位置決めする位置決めピンを有し、基板を位置決めした状態で保持するピックと、ピックにより真空処理ユニットに対して基板を搬入および搬出するようにピックを駆動させる駆動部と、ピックによる基板の搬送動作を制御する搬送制御部とを有し、搬送制御部は、基板を真空処理ユニットに搬入する際の、常温における基板の基準位置情報を予め把握しておき、実処理において、基板を真空処理ユニットに搬入する際に、その基板の基準位置からの位置ずれを算出し、位置ずれを補正して基板を真空処理ユニットに搬入するように駆動部を制御する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】装置自体の有する能力を超えた処理条件が設定されるのを防止することができる基板処理装置及び半導体装置の製造方法を提供するを提供する。
【解決手段】基板処理装置は、ウエハを格納し、真空排気可能な少なくとも1つの真空容器と、この真空容器にガスを供給するガス供給部と、開度を調整することにより真空容器内からの排気量を制御するAPCバルブと、真空容器内の圧力を、ガス供給部によるガス供給量とAPCバルブの開度とに対応付けて記憶する記憶部と、操作者から所定の圧力、ガス供給量、及び開度に関する指示を受付ける受付部と、受付部が受付けたガス供給量の範囲及び開度の範囲のうち、受付部が受付けた所定の圧力に対応する記憶部が記憶するガス供給量の範囲及び開度の範囲に含まれる範囲を算出する算出部と、算出部が算出した範囲を表示する表示部と、を有する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】表示部に接続された複数の制御部のうち、表示部に表示される表示対象を制御することができる基板処理装置、及び半導体装置の製造方法を提供する。
【解決手段】基板処理装置は、基板処理装置を操作する作業者が操作する操作部342と、操作部342に接続され、前記基板処理装置を制御する少なくとも2つ以上の制御部302,304,312と、制御部302,304,312が出力する信号を表示する少なくとも1つ以上の表示部342と、前記基板処理装置の起動時に、前記少なくとも2つ以上の制御部302,304,312のうち、少なくとも2つ以上の制御部302,304,312の起動時間を異ならせるように制御部302,304,312への電源の投入時機を制御する起動時間制御部344と、を有する。
(もっと読む)
半導体製造装置及び処理方法
【課題】少ない数のピンで、被処理基体及びフォーカスリングを昇降させることが可能な半導体製造装置を提供する。
【解決手段】一実施形態の半導体製造装置は、ステージST、複数のピン70、及び駆動部を備えている。ステージは載置面PFを含む。載置面は、被処理基体Wを載置するための第1の領域R1、及び、フォーカスリング18を載置するための第2の領域R2を有する。第2の領域は、第1の領域を囲むように、設けられている。ステージには、複数の孔14hが形成されている。複数の孔は、第1の領域と第2の領域との境界を通って載置面に交差する方向に延びている。複数のピンは、複数の孔にそれぞれ設けられている。複数のピンの各々は、第1の上端面70a、及び、第2の上端面70bを有している。第2の上端面は、第1の上端面よりも上方に設けられており、当該第1の上端面よりも第1の領域の側に偏位している。
(もっと読む)
酸化膜の除去方法及びバッチ式半導体デバイス製造装置
【課題】ウェハ表面のエッチング量の均一さを悪化させずに、エッチング量を増加せしめる酸化膜除去方法及びこの方法に用いるバッチ式半導体デバイス製造装置の提供。
【解決手段】フッ化水素又はフッ化アンモニウムをシリコンウェハ表面上の酸化膜と反応させる第1の工程と、この反応によって生じた反応生成物を200℃乃至530℃で加熱・蒸発させて除去する第2の工程とを有するドライエッチング工程を、隣接するシリコンウェハ同士の間隔を2mm乃至5mmに設定して実施する。エッチング室と、マイクロ波励起機構と、ロードロック室と、クリーンブースとで構成され、処理されるシリコンウェハの隣接するウェハ同士を2mm乃至5mmの間隔で載置し得るウェハボートを有している。
(もっと読む)
基板処理システム
【課題】基板処理システムを提供する。
【解決手段】ウェハ200を処理する基板処理装置100と、少なくとも一台の前記基板処理装置に接続される群管理システムを含む基板処理システムであって、前記基板処理装置は、前記群管理装置に少なくとも前記基板処理装置の状態を含むデータを送信し、前記群管理装置は、前記基板処理装置から送信される前記データを蓄積する第一の蓄積手段と、前記第一の蓄積手段がデータ蓄積時に待機する第二の蓄積手段と、受信した前記基板処理装置の状態に応じて、前記データの蓄積を前記第一の蓄積手段から第二の蓄積手段へ切替える切替制御手段とを備えた基板処理システム。
(もっと読む)
基板受け渡し方法
【課題】基板を載置台にフラットに載置することが可能であり、かつ、静電チャックによる吸着を解除して基板を載置台から持ち上げる際、基板に異常放電を発生し難くすることができる基板受け渡し方法を提供すること。
【解決手段】基板Gを基板載置面4cの上方にて、第1の昇降ピン8aと、第1の昇降ピン8aよりも低い位置の第2の昇降ピン8bとにより支持した基板Gを下降させ、基板Gを、基板Gの中央部から基板載置面4cに載置させる基板載置工程と、基板載置面4cに載置された基板Gを静電チャック41により吸着して、基板Gにプラズマ処理を行う工程と、プラズマ処理終了後、静電チャック41による吸着を解除し、第1の昇降ピン8aと第2の昇降ピン8bとを同じ高さとして基板Gを支持し、基板Gを基板載置面4cから離脱させる基板離脱工程と、を含む。
(もっと読む)
冷却ユニット及びこれを用いたワーク搬送装置
【課題】高温状態のワークからの輻射熱による前記ワークの周辺部品に対する影響を減少させることができ、且つ冷却媒体が漏れたり真空リークが発生したりすることがなく、また、コストの減少させることができ、また、ワーク搬送機構の旋回角度を規制することがない冷却ユニットを提供する。
【解決手段】冷却ユニット100は、その外壁部122がワーク搬送機構20の被冷却面Pに密着した状態でワーク搬送機構20に取り付けられ、被冷却面Pから外壁部122を介して伝導された熱によって下側空間S1に収容された冷却媒体を蒸発させ、冷却媒体が蒸発する際に奪われる気化熱によって外壁部122を介して被冷却面Pを冷却し、下側空間S1の内部の蒸気圧が一定以上になると蒸気放出ユニット130によって下側空間S1の内部の蒸気を真空室に放出する。
(もっと読む)
不純物導入層形成装置及び静電チャック保護方法
【課題】不純物導入層形成装置の静電チャックの性能劣化を抑制する。
【解決手段】静電チャック保護方法は、真空環境で揮発性を有する物質を含む異物の付着を妨げるための保護表面23を、露出されたチャック面13に提供することと、チャック面13に静電吸着された基板Wに、真空環境で揮発性を有する物質を含む表層を形成するプロセスを実行するために、保護表面23を解除することと、を含む。保護表面23は、チャック面を取りまく真空環境に低真空排気運転を実施しているときに提供されてもよい。
(もっと読む)
基板処理装置、および薄膜太陽電池の製造装置
【課題】基板処理装置のセンサ誤作動を抑制する。
【解決手段】本発明に係るスパッタリング装置1は、発光端面65aと受光端面66aとの少なくとも一方を端面として備えた光ファイバ65・66がチャンバ2内に配置された光ファイバセンサ6を備え、光ファイバセンサ6の端面は、チャンバ2の底面から所定の高さ位置で、水平方向に対して上向きに配置されている。
(もっと読む)
搬送ロボット
【課題】ロボットアームの伸縮過程で湾曲による鉛直方向に沿った高さ位置の変動を抑制し、かつ、軽量化も可能な搬送ロボットを提供する。
【解決手段】ロボットアーム11は、それぞれのアーム部21a、21bの長手方向Lに沿った全長のうち少なくとも一部は、長手方向Lに対して垂直な方向に広がる断面の形状が長方形を成す第一領域E1と、この長方形の一方の長辺W1から直角な方向に向けて突出した第二領域E2とからなる形状に形成されている。例えば、第一領域E1を成す長方形の一方の長辺W1の中央部分を中心にして、矩形の第二領域E2が突出しているような、断面が略T字型となるように形成されていれば良い。
(もっと読む)
41 - 60 / 1,240
[ Back to top ]