
Fターム[5H004KB04]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Iの使用 (307)
Fターム[5H004KB04]の下位に属するFターム
Iのみの使用 (9)
Fターム[5H004KB04]に分類される特許
121 - 140 / 298
フィードバック制御ゲインの設定方法及び設定支援プログラム
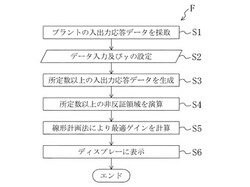
【課題】非反証制御の考え方をオフラインでの制御系設計に適用し、制御ゲインの最適値を計算によって求め得るようにして、設定の容易化を図るとともに、多入力多出力系にも適用可能な画期的な方法を提供する。
【解決手段】制御対象(プラント)Pにステップ入力等を加えたときの入出力応答データを少なくとも1つ採取する(ステップS1)。このデータに基づいて所定数以上の仮想の入出力応答データを生成し(S2,S3)、これらをそれぞれ反証演算式に代入してパラメータ空間に所定数以上の非反証領域を規定する(S4)。反証演算式を線形制約式とすることで、所定数以上の非反証領域の積集合の領域において制御ゲインの最適値を計算により求めることができ(S5)、多入力多出力系にも適用可能になる。
(もっと読む)
PIDパラメータ調整装置および調整方法

【課題】パラメータ調整の工数を削減する。
【解決手段】PIDパラメータ調整装置1は、制御対象に一定振幅の操作量を繰り返し出力するリミットサイクルを発生させて、操作量の出力に応じた制御応答とAT係数に基づきPIDパラメータを算出してPID制御機器2に設定するAT実行部4と、検出された制御応答の情報を記憶するAT情報記憶部6と、AT係数を記憶するAT係数記憶部5と、PIDパラメータの再設定を行うことを指示するAT再設定信号を生成するAT再設定信号生成部9と、AT再設定信号が入力されたときに、記憶されている制御応答の情報とAT係数記憶部5に記憶されているAT係数に基づきPIDパラメータを算出してPID制御機器2に設定するPIDパラメータ値再設定部10とを有する。
(もっと読む)
PID制御機器および不揮発性メモリ保護方法
【課題】EEPROM等の不揮発性メモリが寿命に到達する確率を低く抑える。
【解決手段】PID制御機器は、パラメータの最新値を記憶するRAM3と、パラメータの確定値を記憶するEEPROM4と、RAM3またはEEPROM4への書込み/読出しを行う書込/読出部5とを有する。書込/読出部5は、PIDパラメータの設定変更操作以外の操作を検出する操作検出部50と、操作検出部50がPIDパラメータの設定変更操作以外の操作を検出したときに、RAM3に記憶されているPIDパラメータの最新値を確定値としてEEPROM4に書き込む書込処理部51とを備えている。
(もっと読む)
パラメータ調整装置および調整方法
【課題】制御機器のオートチューニングにおいて確実に必要な回数だけ操作量を上下動させる。
【解決手段】パラメータ調整装置1は、制御対象に一定振幅の操作量MVを繰り返し出力するリミットサイクルを発生させるAT実行部3と、操作量MVの出力に応じた制御量PVの上下動幅を検出する上下動検出部4と、制御量PVの上下動幅の増幅の停止と上下動幅の減衰の停止とを別個に確認できたときに、オートチューニングを完了可能な状況であると判定するAT完了可否判定部5と、操作量MVの出力に応じた制御量PVの応答に基づきPIDパラメータを算出してPID制御機器2に設定するPIDパラメータ値算出部7とを有する。AT実行部3とPIDパラメータ値算出部7とは、オートチューニングを完了可能な状況であると判定された後に、オートチューニングを終える。
(もっと読む)
制御機器および制御方法
【課題】通常時は操作量の急変を抑制し、外乱抑制時などの緊急時には必要とされる操作量の急変を抑制しないようにする。
【解決手段】制御機器は、外部から入力された制御量目標値SPnの変化率の変化率を上限値と下限値の範囲内に制限する上下限処理を行い、上下限処理後の制御量目標値SPn’を算出する目標値変化量変化量制限部3と、算出された制御量目標値SPn’と制御量PVとの偏差に基づいて操作量MVを算出して制御対象に出力するPID制御演算部4とを備える。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
制御装置および制御方法
【課題】電流値の総和を制限する。
【解決手段】優先側上限処理部L_MH1と非優先側上限算出部C_MH2と優先側上限算出部C_MH1 とは、コントローラPID1,PID2から出力される操作量出力MV1 ,MV2 の総和が制御装置全体の操作量出力上限値MT1以下となるように抑制する。一方、総電流値算出部C_CTaは、操作量出力MV1 ,MV2に応じて2個のヒータに流れる電流値の総和である総電流値を算出し、総操作量値算出部C_MTaは、操作量出力MV1,MV2の総和である総操作量値を算出する。全体操作量出力上限値算出部C_MT1は、総電流値と総操作量値とから制御装置全体の操作量出力上限値MT1を修正する。
(もっと読む)
オートチューニング方法、温度調節器および熱処理装置
【課題】冷却制御において、適切な制御パラメータを得られるようにする。
【解決手段】加熱冷却制御において、加熱側のオートチューニングは、期間T1において、100%のステップ状の加熱操作量を印加してステップ応答波形から加熱側のPIDゲインを算出し、冷却側のオートチューニングは、期間T3において、50%以下である30%のステップ状の冷却操作量を印加して冷却側のPIDゲインを算出するようにしている。これによって、水冷のような非線形特性を示す冷却方式の場合に、100%の冷却操作量を印加して冷却側のPIDゲインを算出する従来例に比べて、より正確に制御対象の特性を同定して、適切な冷却制御の制御パラメータを求めることが可能となる。
(もっと読む)
PIDパラメータ調整装置および調整方法
【課題】ハンチングの発生を確実に回避する。
【解決手段】PIDパラメータ調整装置1は、リミットサイクル式のオートチューニング(AT)によりPIDパラメータを算出してPID制御装置2に設定するAT実行部3と、PID制御装置2がPIDパラメータに基づいて制御対象に対する制御を開始した後に、制御量PVにハンチングが発生した場合に、ハンチングを抑制すべくPIDパラメータを修正するハンチング抑制部5と、制御の整定状態を検出したときに、ハンチング抑制部5によるハンチング検出とハンチング抑制とを終了させる整定検出部6と、PID制御装置2の修正前のPIDパラメータと修正後のPIDパラメータとの変化比率に基づき、AT実行部3の算出係数を修正するAT算出係数修正部7とを有する。
(もっと読む)
弁制御装置及び弁制御方法
【課題】十分な経験や専門的知識のないユーザーであっても、短時間で最適な制御性を得ることができるとともに、各定数の変更の仕方が適切でないために却って制御性を悪化させることを防止することもでき、ユーザーにとって使い勝手のよい弁制御装置を提供する。
【解決手段】検出される温度(過熱度)Tshと、目標温度(過熱度)Tsとが一致するように、膨張弁4の弁開度を制御する弁制御装置8であって、検出温度と目標温度との偏差e(t)を求め、少なくともこの偏差と、設定された制御パラメータ(PB、Ti、Td)とを演算式に代入して弁開度の変化量m(t)を求めるとともに、制御パラメータを自動的に設定するオートチューニング手段と、オートチューニング手段で設定された制御パラメータを用いて求めた弁開度の大きさを、設定された制御レベルに応じて段階的に調整する制御レベル調整手段とを備える弁制御装置8等。
(もっと読む)
サーボ制御ループのためのプリフィルタおよびその応用
【課題】エラー制御信号はしばしばそれ自身がエラーを有し、所定の周波数範囲においてしか信頼できない。
【解決手段】サーボ制御ループを用いてリソグラフィ装置のエラー制御モジュールの位置を制御する方法、システムおよびコンピュータプログラムが説明される。システムは、フィルタと、フィルタとつながれ制御信号を受け取るサーボコントローラと、サーボコントローラとつながれエラー制御モジュールの位置を制御するアクチュエータと、を有する。フィルタは、サーボ制御ループの前段において、制御信号の振幅と位相を所望の周波数範囲で変調することによって、制御信号をフィルタする。
(もっと読む)
プラントの制御装置、及び火力発電プラントの制御装置
【課題】本発明の目的は、予測モデルの特性が実際のプラントの特性と相違する場合でも、プラントの制御特性を良好に維持できるプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに対する操作信号を生成する操作信号生成手段と、プラントの特性を模擬するモデルと、モデルで模擬した出力信号が予め設定された目標を満足するようにモデルの入力信号を生成する学習手段と、学習手段での学習結果に従って学習信号を計算する学習信号生成手段とを備え、更に、ある操作信号及び更新した操作信号をプラントに与えた結果として取得した該プラントの第1の計測信号及び第2の計測信号とその目標値との誤差である第1の誤差及び第2の誤差をそれぞれ計算する操作結果評価手段と、第2の誤差が第1の誤差よりも大きい場合に操作信号生成手段で生成する操作信号の補正信号を生成する補正信号生成手段とを備えるように構成した。
(もっと読む)
制御パラメータ調整システム
【課題】制御パラメータの調整テストを適切に終了させることが可能な制御パラメータ調整システムを提供する。
【解決手段】制御パラメータ調整システムは、制御パラメータ調整装置10とテスト監視装置20とを備える。テスト監視装置20は、予め定められた終了条件を満たす場合、制御パラメータ調整装置10にテスト終了信号を送出する。制御パラメータ調整装置10は、テスト監視装置20からテスト終了信号を受信した場合、該テスト終了信号受信時に算出された制御パラメータを制御装置6に適用する。
(もっと読む)
オートチューニング方法、温度調節器および熱処理装置
【課題】加熱冷却制御において、1回のオートチューニングによって、加熱側および冷却側の制御パラメータを得られるようにすることを目的とする。
【解決手段】加熱側の比例帯が2位置制御によるリミットサイクル波形の設定温度SPを基準とした昇温側の振幅Aupに比例する加熱側の算出式、および、冷却側の比例帯が、前記リミットサイクル波形の設定温度SPを基準とした降温側の振幅Adownに比例する冷却側の算出式をそれぞれ用いて、加熱側の比例帯および冷却側の比例帯を算出するようにしている。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じない安定な制御を可能とする。
【解決手段】各チャンネルのコントローラC1,C2の比例ゲインを、各チャンネル間の干渉を考慮して、操作量を変化させたチャンネルのみの検出温度の応答に基づいて求められる比例ゲインよりも小さな比例ゲインとしている。
(もっと読む)
PID制御支援装置
【課題】PID調節器のパラメータの調節にかかる手間を軽減しつつ、複数の制御対象間で起こる干渉を考慮した制御を実現する。
【解決手段】伝達関数行列パラメータ同定手段16は、操作量MVの時系列データと、操作量MVに応じて制御対象13から出力される制御量PVの時系列データに基づいて、予め構造が設定された制御対象13を表現する伝達関数行列のパラメータを同定し、PIDパラメータ計算手段15は、伝達関数行列パラメータ同定手段16にて同定された伝達関数行列のパラメータに基づいて、制御対象13を制御するPID調節器12のパラメータを計算し、モデル予測制御パラメータ計算手段14は、伝達関数行列パラメータ同定手段16にて同定された伝達関数行列のパラメータに基づいて、PID調節器12の設定値SVPIDをモデル予測制御にて制御するパラメータを計算する。
(もっと読む)
PIDパラメータ調節支援装置
【課題】熟練を要することなく、PIDパラメータを適正に調節できるようにする。
【解決手段】複数伝達関数パラメータ同定手段14は、制御対象13に入力される操作量MVの時系列データと、操作量MVに応じて制御対象13から出力される制御量PVの時系列データに基づいて、予め構造が設定された制御対象13を表現する複数の伝達関数のパラメータを同定し、適合率計算手段15は、その伝達関数による制御量PVの推定値と、制御対象13から出力された制御量PVの実測値との適合率を計算し、最良適合率伝達関数選択手段16は、適合率計算手段15にて計算された適合率の最も良い伝達関数を制御対象13のモデルとして選択し、最適PIDパラメータ探索手段17は、最良適合率伝達関数選択手段16にて選択された伝達関数を対象として、予め決められた評価指標が満たされるようにPIDパラメータを探索する。
(もっと読む)
呼吸加熱器の閉ループ制御のためのPID係数調整
【課題】流量の測定を必要とせず呼吸システム内の温度測定に依拠する信頼性のあるPIDフィードバック制御を提供すること。
【解決手段】呼吸システム(10)のために設けられる加熱器システム(16)は、PIDフィードバック制御(100)を有し、PIDフィードバック制御(100)では、ウォームアッププロセスなどの際に係数が調整され、係数は、流量または湿度レベルを直接監視することを必要とせずに、温度目標値に関する熱入力と熱出力の間の差に基づいて、加熱された水(27)のチャンバ(20)を通る気体の推定流量に対応するように調整される。目標値に関する測定された温度の挙動に基づく係数の定常状態調整もまた開示される。
(もっと読む)
121 - 140 / 298
[ Back to top ]