
Fターム[5H004KB04]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Iの使用 (307)
Fターム[5H004KB04]の下位に属するFターム
Iのみの使用 (9)
Fターム[5H004KB04]に分類される特許
41 - 60 / 298
圧力レギュレータ及び除振装置
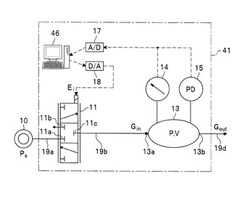
【課題】下流側に流量変動が発生した場合においても、高応答かつ高精度に圧力制御を行うことができる圧力レギュレータを提供する。
【解決手段】圧力レギュレータ41は、サーボ弁11によって、気体供給源10から供給される気体の等温化圧力容器13への流入流量を規制し、等温化圧力容器13内の圧力を一定に保持する。ここで、サーボ弁11を操作する圧力制御手段(コンピュータ46)は、圧力計14で計測した等温化圧力容器13内の圧力をフィードバック制御する圧力制御系をメインループとし、その内側に、流入流量を制御する流入流量制御系を構成すると共に、圧力微分計15で計測した等温化圧力容器13内の圧力微分値に基づいて等温化圧力容器13における流入流量と流出流量との差である流入出流量差を推定するオブザーバを構成し、推定した流入出流量差を流入流量制御系にフィードバックするモデル追従制御系を構成する。
(もっと読む)
プログラム調節計

【課題】複数台のプログラム調節計を並列運転するのにあたり、比較的安価な構成で、プログラムパターンの進行についてセグメント単位で同期をとることができるプログラム調節計を提供すること。
【解決手段】複数のセグメントに分割された時間の経過に応じて目標設定値が変化するように作成された所定の制御プログラムパターンに基づき制御対象を制御するプログラム調節計において、他のプログラム調節計の運転状態を監視する監視手段を設け、いずれかのプログラム調節計がセグメントにおける目標設定値の変化に追従できない場合には次のセグメントへの移行を遅らせることを特徴とするもの。
(もっと読む)
PIDパラメータ調整支援装置および方法
【課題】ユーザがPIDパラメータ調整の行き詰まりに至る確率を低減する。
【解決手段】PIDパラメータ調整支援装置は、知識型の調整手法を実行してPIDパラメータの推奨値を探索する知識型調整部20と、分析型の調整手法を実行してPIDパラメータの推奨値を探索する分析型調整部21と、知識型調整部20と分析型調整部21とによるPIDパラメータの推奨値を提示する調整情報提示部3とを備える。
(もっと読む)
被処理物の熱処理装置
【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、数値解析データと実際のプラント特性との誤差が大きい場合においても、計測データによるモデル修正を短期間で終了できる、又は、データ蓄積による統計モデル構築時間増加を回避できる機能を具備したプラントの制御装置又は火力発電プラントの制御装置を提供することにある。
【解決手段】プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、前記統計モデルの構築に用いるデータを保存するモデル構築データベースと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、前記モデル構築データベースに保存される情報に含まれる解析モデルデータの選択、又は計測モデルデータを削除する機能を具備するモデル修正部とを備え、前記統計モデルは前記モデル修正部によるモデルデータの修正結果を用いてモデル出力を生成する制御装置。
(もっと読む)
外乱抑制荷重制御装置
【課題】リニアモータ併用シリンダから出力される実測荷重値を目標荷重値に良好に追従させて外乱に対する応答性を高めるとともに、リニアモータの発熱を抑えることができる外乱抑制荷重制御装置を提供すること。
【解決手段】リニアモータ併用シリンダ荷重制御部は、リニアモータ併用シリンダの目標荷重値信号と実測荷重値信号の差分信号からエアシリンダ装置の目標荷重値信号に対する追従特性が優れた低周波数帯域を取り出して、この低周波差分信号に基づいてエアシリンダ装置にエアシリンダ装置用最適荷重付加指示信号を送るエアシリンダ装置荷重制御部;及び上記差分信号からリニアモータの目標荷重値信号に対する追従特性が優れた高周波数帯域を取り出して、この高周波差分信号に基づいてリニアモータにリニアモータ用最適荷重付加指示信号を送るリニアモータ荷重制御部;を有する。
(もっと読む)
制御システム
【課題】非干渉化器を作動させた状態で、実運転させて昇温させた場合に、制御対象の温度が低い領域では干渉を見越して操作量を少なくするようにフィードバックが作用するので、投入熱量が抑制されてしまう。その結果、実運転開始から目標温度までの昇温に時間がかかるため、昇温までの時間の短縮化を図る。
【解決手段】複数の制御手段と制御対象との間に、各制御量において、一方の制御量が他方の制御量に与える影響をなくすか低減するように処理する非干渉化手段を備え、非干渉化手段として、補償要素3bと減算器3dとの間の減算器側ラインおよび補償要素3bと加算器3cとの間の加算器側ラインに、補償要素3bからのフィードバック量を可変するフィードバック量可変手段3h3,3h4を備えた。
(もっと読む)
圧力制御装置及び圧力制御方法
【課題】サーボモータにより動力伝達手段を介して作動体を動作させて受圧体に与える力を、ロードセル等を使わずに正確に制御し、機械の構成を簡単にし、信頼性を得る。
【解決手段】サーボモータ11により射出圧力を制御する電動射出成形機1の制御装置15は、電動射出成形機1の制御モデルに対して構築され射出スクリュー5が発生する力を推定するオブザーバ19と、サーボモータ11に対する電流指令値Iとパルスエンコーダ14の回転位置θとによりオブザーバ19が推定した力を入力して射出スクリュー5に作用させる力をフィードバック制御する射出圧力フィードバック制御部20とを備え、オブザーバ19は、電流指令として重畳させた振動に応じて生じる抗力が、機械インピーダンス要素を介して被駆動部に作用する力を外乱として同定した制御モデルに基づいて構成される外乱オブザーバ部を備え、被駆動部に作用する力を推定する。
(もっと読む)
制御装置
【課題】より簡単な構成で目標入力に対し確実に追従可能な制御装置を提供する。
【解決手段】目標値rzと制御対象11の出力とに基づく第1操作量を制御対象11に与えるフィードバック制御器21と、目標値rzに基づく第2操作量を制御対象11に与えるフィードフォワード制御器31とを備え、j型(jは1以上の正整数)の制御系を生成する場合に、フィードフォワード制御器31が、目標値rzから前記制御対象11の出力と目標値rzの偏差までの伝達関数の分子の(j−1)次項以下の各項の係数をそれぞれゼロとするような制御要素を有している制御装置を提供する。
(もっと読む)
位置制御装置
【課題】位置検出にインクリメンタルタイプのパルスエンコーダを使用すると、低速領域ではパルスが発生しなくなるため、低速領域では大きな速度変動が発生する。
【解決手段】位置制御装置のマイナーループに速度制御を持たない位置制御とし、
この位置制御部をPID制御器とし、入力θrefと出力θdet比のPID制御器の伝達関数を次式で求めた後、位置制御部のパラメータKPθ、KIθ、KDθを求めたものである。
θdet/θref=(KDθs2+KPθs+KIθ)/{Jdys3+(KDθ+Ddy)s2+KPθs+KIθ}
(ただし、KPθは比例要素、KIθは積分要素、KDθは微分要素、Jdyはモータ慣性、Ddyは回転損失、sはラプラス演算子)
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
フィードフォワード制御装置およびフィードフォワード制御方法
【課題】制御回路の構成を複雑化させることなく、変化量演算の取り扱いを容易化したフィードフォワード制御装置およびフィードフォワード制御方法を提供する。
【解決手段】フィードフォワード制御装置50Aは、あるプロセス量を指標にして先行要素の量を決定するフィードフォワード制御部21Aを具備し、フィードフォワード制御部21Aは、現在のプロセス量を入力し、サンプリング周期毎に逐次記憶する記憶部を有し、この記憶部に記憶された過去のプロセス量を入力時から所定時間経過時に出力するサンプリング遅延器51aと、サンプリング遅延器51aに入力される現在のプロセス量と記憶部に記憶された過去のプロセス量とから所定時間で変化したプロセス量の変化分を算出する減算器24とを備え、先行要素の量を減算器24で算出されたプロセス量の変化分に基づいて調整するように構成される。
(もっと読む)
適応制御装置
【課題】負荷変化や制御対象の特性変化に対しても即応でき、より優れた応答特性を実現し得る適応制御装置を提供する。
【解決手段】ループゲイン調節器7、適応制御器5およびPI制御器3を有し、制御偏差ea(t)を自乗する乗算器16と、乗算器16の出力を入力とする1次遅れ要素17と、を備えた適応制御器5の可変ゲイン演算部11において、制御偏差ea(t)の変動傾きが負のときの1次遅れ要素17の時定数を制御偏差ea(t)の変動傾きが一定または正のときの1次遅れ要素17の時定数よりも大きい値に設定する。
(もっと読む)
自動チューナおよび制御要素をチューニングする方法
【課題】分散化制御機能を有するプロセス制御ネットワーク内で制御要素をチューニングするのに用いられる自動チューナを提供する。
【解決手段】自動チューナは、制御要素62が動作している第1のフィールド装置44内に位置した第1のチューニング要素66と、通信ネットワークによって第1の装置と通信する異なる装置14内に位置する第2のチューニング要素71とを含む。第1のチューニング要素は、自動チューニング手続きの間にデータを集め、プロセス特性を決定し、通信ネットワークによって、決定されたプロセス特性を第2のチューニング要素に伝える。第2のチューニング要素は、送信されたプロセス特性に基づいて制御要素のための新しいチューニングパラメータを決定し、通信ネットワークによって、これを制御要素に送り、それにより、制御要素を再チューニングする。
(もっと読む)
印刷装置およびゲイン補正方法
【課題】特定の制御対象について、速度変動を抑えた安定した動作を実現することが困難であった。
【解決手段】制御対象を駆動するモーターと、当該制御対象の速度を検出し、当該検出した速度と当該制御対象の目標速度との差に基づいて当該モーターの駆動をPID制御する制御部とを備える印刷装置であって、上記制御部は、上記モーターを駆動させることにより特定の制御対象を動作させた所定期間における当該特定の制御対象の速度変動量を取得し、上記PID制御のための所定の定数を、当該速度変動量に基づいて求めた補正比率に応じて補正するゲイン演算部を備える構成とした。
(もっと読む)
フィードバック制御装置とフィードバック制御方法
【課題】むだ時間を含む制御対象に対して、安定して制御を行うことができ、かつ、制御量の応答性が良好となるフィードバック制御装置と、フィードバック制御の制御方法とを提供する。
【解決手段】制御量を検出する検出手段と、むだ時間を除いた制御対象の伝達関数の逆モデルに、制御量を入力して、第一出力値を得る第一出力値計算手段と、操作量から、第一出力値を減算して、第二出力値を得る第二出力値計算手段と、むだ時間を除いた前記制御対象の伝達関数に、第二出力値を入力して、第三出力値を得る第三出力値計算手段と、目標値から、制御量を減算して、制御偏差を得る制御偏差計算手段と、制御偏差から、第三出力値を減算して、補正された制御偏差を得る制御偏差補正手段と、補正された制御偏差を入力して、操作量を得るPID制御器と、を具備するものである。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
プロセス制御システムの制御ループタイミングを調整する方法及び装置
【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
41 - 60 / 298
[ Back to top ]