
Fターム[5H004KB04]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Iの使用 (307)
Fターム[5H004KB04]の下位に属するFターム
Iのみの使用 (9)
Fターム[5H004KB04]に分類される特許
21 - 40 / 298
PIDゲイン調整装置及びPIDゲイン調整方法
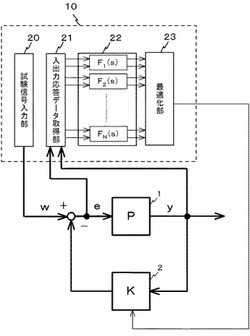
【課題】PIDゲインを確実かつ短時間に最適化する。
【解決手段】入出力応答データ取得部21は、線形時不変なプラント1における入出力応答データを取得する。動特性抽出部22は、入出力応答データ取得部21によって取得された入出力応答データを、サンプル周波数ωiを固有角周波数とするそれぞれ異なる複数のバンドパスフィルタFi(s)に通すことにより、複数の異なるサンプル周波数ωi各々に対するプラント1の動特性を抽出する。最適化部23は、プラント1を制御するフィードバック制御系のコントローラ2のPIDゲインに関して凸となる制約条件の下で導出された線形制約式に、動特性抽出部22によって抽出されたサンプル周波数ωiがそれぞれ異なるプラント1の動特性をあてはめることにより、複数の線形制約式を作成し、作成された複数の線形制約式に基づいて線形計画法を用いてPIDゲインの最適値を求める。
(もっと読む)
制振制御装置、制振制御方法およびコンピュータプログラム

【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて、制御対象の安定した制御を実行する。
【解決手段】制御装置126は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部130と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部132と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部134とを備える。
(もっと読む)
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて制御対象の安定した制御を実現すると共に、目標値の推移を操作員によって容易に設定する。
【解決手段】制御装置128は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部140と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部142と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部144とを備え、第1伝達関数は、ユーザによる操作入力に応じて設定された複数の目標点に基づき、隣接する目標点同士を結線して形成される。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、プラントの計測データを使用してRBFネットワークによる統計モデルをオンラインで調整する場合に、制御周期以内での最適化計算の終了を可能にして、統計モデルの推定精度を向上させたプラントの制御装置を提供することにある。
【解決手段】本発明のプラントの制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、統計モデルの構築に用いるデータを保存するモデル構築データベースと、計測信号に対して統計的処理を施し、モデル構築データを生成するデータ前処理部と、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、モデル構築データベースに保存される情報に含まれる統計モデルの半径パラメータを調整するモデル調整部とを備え、統計モデルはモデル調整部による半径パラメータの調整結果を用いてモデル出力を生成するように構成する。
(もっと読む)
適応制御装置の設計方法
【課題】安定したプロセス制御を実現する適応制御装置の設計を速やかに行うことのできる適応制御装置の設計方法を提供することを目的とする。
【解決手段】プラント1、PI制御器3、適応制御器5の伝達関数を与える第1工程と、PI制御器3と適応制御器5とを合わせた制御系全体の伝達関数を求める第2工程と、制御対象の入力側に制御系外部から与えられる外乱を想定したときに、該外乱から出力までの伝達関数を、制御系全体の伝達関数とプラント1の伝達関数とを用いて表現する第3工程と、規範モデルを設定する第4工程と、規範モデルと第3工程で求めた伝達関数とによる部分モデルマッチングにより、PI制御器3における比例ゲイン及び積分ゲイン並びに適応制御器5の時定数を決定する第5工程とを有する適応制御装置の設計方法を提供する。
(もっと読む)
初期化操作方法
【課題】目標操作量まで滑らかに変化するように接続できるとともに応答性を改善し得る初期化操作方法を提供する。
【解決手段】積分器3からの出力が比例成分項を含む多項式で表わされる制御器1を用いて制御を開始する際、その時点での目標値rと制御量yとの差である制御偏差を無くすようにする初期化操作方法であって、初期化時に、多項式の内、少なくとも1つの比例成分項を積分バイアス量xbとして分離し、独立した式として設定することを特徴とする。
(もっと読む)
簡易手動自動切り替え装置
【課題】手動自動切り替え装置に関し、断線時の切り替え時に安全性を確保し、自動化制御・運転操作全体が簡素化でき、装置の適用分野を拡大できる。
【解決手段】1)手動自動切り替えスイッチの前の正規化ゲイン設定機能によって、固有周波数等の時間に関する第1正規化を行い、手動自動切り替えスイッチの後の正規化ゲイン設定機能によって、プロセスゲイン等のプロセス量に関する第2正規化を行うように振り分ける。2)プロセス量が閾値を超えたときの処理方式として従来の高負荷(高速)運転系や系統連係時のような群運転系における手動移行時操作量保持処理以外に、低負荷(低速)運転系や単独運転系や条件によって適正モードが異なる系などに対する操作量遮断処理によるプロセスの自動遮断モードの条件選択機能も設ける。3)実機においても、実施例のようなシミュレーションによる確認が行えるテストモードを有する手動自動切り替え機能を設ける。
(もっと読む)
2自由度制御系のチューニング
【課題】フィードフォーワード制御器とフィードバック制御器から構成される2自由度制御系において主に制御対象の逆モデルから構成されるフィードフォーワード制御器内部のモデルと実際の制御対象との間にモデル誤差が生じた場合の目標値応答性を改善する。
【解決手段】フィードバック制御器4の操作量がゼロ付近となるようにフィードフォーワード制御器3内部のモデルを調整する機構と前記フィードフォーワード制御器内部のモデルとは無関係な外乱などを調整する機構を具備する。
(もっと読む)
オートチューニング装置及びオートチューニング方法
【課題】カスケード接続されたPIDコントローラのPIDパラメータをオートチューニングにより求める。
【解決手段】スレーブ制御量に対して2位置制御を行い測定したリミットサイクル波形からスレーブコントローラ5のPIDパラメータを求め及びスレーブ側制御対象9を一次遅れ+むだ時間モデルで同定し、マスタ制御量に対して2位置制御を行い測定したリミットサイクル波形からマスタ側制御対象10を同定する。さらにスレーブ側をフィードバック制御したときの閉ループ伝達関数を求め、このスレーブ側閉ループ伝達関数を一次遅れ+むだ時間モデルで近似することによりマスタPIDコントローラ4のPID定数を算出する。
(もっと読む)
負荷イナーシャ推定方法及び制御パラメータ調整方法
【課題】負荷イナーシャ推定方法及び制御パラメータ調整方法を提供する。
【解決手段】負荷位置制御システムにおいて、フィードバック制御系21による負荷位置制御試験を実施して、特定の負荷位置θLで生じる第1の位置偏差Δθを測定し、負荷位置制御システムのモデルである負荷イナーシャ推定モデル60において、フィードバック制御系モデルによる送り系モデルの負荷位置制御シミュレーションを実施し、このときに前記特定の負荷位置で生じる第2の位置偏差Δθが、前記第1の位置偏差に等しくなるまで、送り系モデルに含まれている負荷イナーシャJLを調整して前記負荷位置制御シミュレーションを繰り返し、その結果、前記第2の位置偏差が、前記第1の位置偏差に等しくなれば、このときの送り系モデルの負荷イナーシャが実機の送り系の負荷イナーシャであると推定する。また、この推定した負荷イナーシャで逆特性モデル50の係数a3〜a5を設定する。
(もっと読む)
オートチューニング実行装置および方法
【課題】マルチループ制御系において次にオートチューニングを実行すべき未実行ループを効率よく選択する。
【解決手段】オートチューニング実行装置は、制御ループ毎に設けられ、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、AT未実行の制御ループを記憶するAT未実行ループ登録部2と、制御ループ毎に設けられ、ループ間干渉により各制御ループに発生する制御量PVの最大変動量を検出する最大変動量検出部3と、所定の特定処理開始時点において最大変動量検出部3の検出結果とAT未実行ループ登録部2の登録内容とを参照して、最大変動量が規定条件以内でかつ最大になるAT未実行ループを特定する特定部4と、AT未実行ループが特定されたときにこの制御ループのAT実行部1に対してATを起動するよう指示するAT起動部5とを備えている。
(もっと読む)
フィードバック制御回路、フィードバック制御システム
【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
PID制御器の構成方法、プログラム及びシステム
【課題】プラントの事前情報が乏しく不安定系であっても、入力と出力が観測できれば準最適なロバストPID制御器を構成可能にする。
【解決手段】PID制御器の係数空間の中から、入出力データによって反証された組合せを除外して絞込みを行い、その係数候補群における各候補の評価関数履歴と全体での進化履歴の情報を共有させながら候補群を移動させ、同時に候補群近傍の係数空間探索を自動的に行いつつ、プラントと制御器の全体系におけるロバスト安定を実現する係数を非反証的に自動設計する機能を与える。各候補の評価関数履歴のうち最小となったPIDゲインと、候補群全体履歴のうち最小評価値になったPIDゲインの情報を記憶・共有しつつ、PSOにより、より良い中心を目指して候補群全体を移動させ、候補周辺探索と、その中からの反証候補除去を実行することで自動設計し、PSOによる候補群の各粒子の周辺探索候補に対しても非反証制御を行う。
(もっと読む)
発電プラントおよび発電プラント制御装置
【課題】蒸気タービン回転数の変動に基づいてガバナ弁を制御する制御機能の試験を的確に安全に行なう。
【解決手段】発電プラント制御装置は、ガバナ弁位置指令信号14を出力するボイラ・タービン協調制御部40と、調整信号21とガバナ弁位置指令信号14とを加算してガバナ弁指令信号22を出力するガバナ制御部41と、を有する。ガバナ制御部41は、定格周波数と蒸気タービンの回転数の実測データとを比較して偏差信号18を出力する減算器17と、偏差信号18に模擬試験信号を加算して調整基礎信号43を出力する試験信号加算部42と、調整基礎信号43に比例処理を行なって調整信号21を出力する比例器20と、調整信号21にガバナ弁位置指令信号14を加算してガバナ弁指令信号22を出力する協調制御加算器23と、を具備する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】複数の制御系に関し、定常状態においてエネルギー使用量が指定された一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないように、制御を行う。
【解決手段】電力総和抑制制御装置は、複数の制御ループのヒータの電力使用量を規定する割当総電力の情報を受信する割当総電力入力部(10)と、各制御ループの消費電力値を取得する電力値取得部(11)と、消費電力値から各制御ループの電力余裕を算出し、電力余裕の総和に対する各制御ループの電力余裕の比率と割当総電力に基づいて各制御ループの操作量出力上限値を算出する電力抑制部(12〜18)と、制御ループ毎に設けられ、操作量を算出し、操作量の上限処理を実行して上限処理後の操作量を対応する制御ループのヒータに出力する制御部(19−i)とを備える。
(もっと読む)
21 - 40 / 298
[ Back to top ]