
Fターム[5H004KB04]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Iの使用 (307)
Fターム[5H004KB04]の下位に属するFターム
Iのみの使用 (9)
Fターム[5H004KB04]に分類される特許
141 - 160 / 298
プロセスモデルの履歴管理方法および選択方法

【課題】複数のプロセスモデルを有する該プロセスモデル履歴を管理する。
【解決手段】第1および第2の優先度基準の組み合わせに基づいて、複数のプロセスモデルを体系化し、各プロセスモデルは、前記第1および前記第2の優先度基準に関連する値の組み合わせに応じて表され、前記体系化されたプロセスモデルのそれぞれと前記体系化されたプロセスモデルのそれぞれに共通の基準点との間の分離度を計算し、前記基準点は、前記第1および前記第2の優先度基準に関連する値を含み、除去の前に、除去されることになっているプロセスモデルと同一の制御ルーチンに関して同定されるプロセスモデルの総数が、制御ルーチンに関して同定される前記プロセスモデルの総数に関連する閾値を超える場合には、前記分離度に基づいて、前記モデル履歴からプロセスモデルを除去する。
(もっと読む)
適応プロセス制御ループ制御装置、プロセス制御システム、およびプロセス制御システム制御方法

【課題】プロセス制御環境内の適応プロセス制御ループ制御装置を提供する。
【解決手段】複数のモデルパラメータ同定サイクルを実行するモデル同定ルーチンを含む。各サイクルは、1つまたは複数のシミュレーションパラメータにもとづくプロセスの複数のシミュレーションを含む。各シミュレーションは、異なるシミュレーションパラメータ値を有する。各シミュレーションは、入力として収集された制御データを用いる。各サイクルは、シミュレーションの出力に関連して、シミュレートされた動作状態データおよび収集された動作状態データにもとづく各シミュレーションに関する推定エラー計算および推定エラーの少なくとも2つおよび該少なくとも2つの推定エラーのそれぞれに対応する前記シミュレーションにおいて用いられるシミュレーションパラメータ値にもとづくモデルパラメータ値のモデルパラメータ計算を含む。
(もっと読む)
プロセス制御装置およびパラメータ最適調整方法
【課題】調整または試験段階における労力と時間を軽減しつつ、入出力にむだ時間を含むプロセスにおけるPI調節器およびPID調節器のパラメータを簡易な計算で決定するとともに、様々のプロセスに広く適用できるようにする。
【解決手段】最適調整手段13には、プロセス制御装置11として用いられるPI調節器またはPID調節器の時定数およびゲインをそれぞれ決定するゲイン決定手段13aおよび時定数決定手段13bが設けられ、ゲイン決定手段13aおよび時定数決定手段13bは、制御対象12のプロセスの目標値SVから制御量PVまでの閉ループ伝達関数Gcの絶対値が低周波帯域において1になるように、PI調節器またはPID調節器の時定数およびゲインをプロセスの係数から決定する。
(もっと読む)
PID調節器を含む閉ループ系のプロセス制御装置
【課題】 PID調節器の比例ゲインが、外乱や目標値変動のような急激な変動に対応して、常に適切な値になるように自動的に算出できる、PID調節器を含む閉ループ系のプロセス制御装置を提供する。
【解決手段】プロセス1と、目標値に従って該プロセスに対する操作量を出力する、比例、積分および微分の3動作からなるPID調節器(10〜14)を含む閉ループ系のプロセス制御装置において、前記プロセスより出力される制御量の時間に対する変化率に基ずいて演算処理される制御ゲイン調整装置の出力でPID調節器の比例ゲインが可変ゲインとして設定できる手段を具備するとともに、前記制御ゲイン調整装置15は、定数発生器で発生させたしきい値α、微分した制御量φ* との間の偏差(α−φ*)を積分器30に入力し、その積分器30の出力をPID調節器の比例ゲインとするように構成した。
(もっと読む)
位置制御装置
【課題】加減速の小さい動作領域において、制御対象プラントが振動特性を有していても、外乱抑制性能の向上を達成する位置制御装置を提供する。
【解決手段】指令応答性能を重視したPI制御器とロバスト外乱抑制性能を重視したロバスト制御器を並列配置した速度制御器を構成し、加速度情報に基づいて、これらを切換えて制御する。切換え時におけるロバスト安定性の確保と円滑な切換え動作を実現するため、切換え時間を持った漸次切換えやトルク補償を行う。
(もっと読む)
サーボ制御装置
【課題】機械特性に起因する振動を低減すると共に、往復時の軌跡を一致させるサーボ制御装置を得る。
【解決手段】微分器8は、位置指令信号を微分することにより速度フィードフォワード信号を演算する。演算器10は、微分器8による演算値を微分すると共に駆動対象機械の総イナーシャを乗算する。振動抑制フィルタ41は、演算器10による演算値から機械2の共振周波数成分を減衰し、反共振周波数成分を増幅することによりトルクフィードフォワード信号を演算する。フィードバック補償部5は、位置指令信号と速度フィードフォワード信号とトルクフィードフォワード信号とに基づいて機械2を駆動する。
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック制御を行う。プラントへの制御入力である出力操作量UFMを保持操作量UHOLDに設定可能であるときは、出力操作量UFMを保持操作量UHOLDに設定するとともに、制御偏差の積算値ERRIを保持操作量UHOLDと比例項UPとの差に積分項ゲインKIの逆数を乗算することにより算出し、積算値ERRIに積分項ゲインKIを乗算して積分項UIを算出する。
(もっと読む)
多関節型ロボットの制御方法
【課題】従来のオブザーバ制御演算装置では、ロボット自身の姿勢やアームに取り付ける負荷の変化に対応して制御性能の劣化を防ぐには、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなる。
【解決手段】アームに取り付けられる複数の負荷に応じて予め調整されたパラメータを持つ複数の状態オブザーバと状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいてそれぞれの状態FB値のモータ電流指令への加算量を調整する際に、各姿勢におけるアーム回転半径の最大値に対する2乗比の1次関数として定義する姿勢ゲインを乗じることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、ロボットの姿勢変化に応じた振動抑制効果が得られる状態で演算時間を削減できる。
(もっと読む)
サーボ制御装置
【課題】 モータ位置検出器を用いずに負荷位置検出器のみで安定且つゲインを大きく設定することができるようにする。
【解決手段】 負荷位置検出器と負荷位置検出値を用いて負荷加速度と躍度を演算する微分器と、それぞれにゲインを乗じて補償信号を算出する補償器と補償器の出力をトルク指令値に加算する加算器を備える。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
温度制御方法および波長変換レーザ装置
【課題】電源投入直後に温度制御対象の温度が目標温度よりも行き過ぎて高くなることを抑制する。構成を簡単化する。
【解決手段】設定温度(Ts’)と対象温度(Tx)の偏差(ΔT)に基づいてペルチェ素子(27)をPID制御するPID回路(25)と、電源投入時には環境温度(Tc)を設定温度(Ts’)とし次いで所定の時定数の一次遅れの関数で環境温度(Tc)から目標温度(Ts)へと設定温度(Ts’)を変化させる温調回路(20)とを具備する。
【効果】偏差(ΔT)が常に小さな値に維持されるから過積分により電源投入直後に対象温度(Tx)が目標温度(Ts)よりも行き過ぎて高くなることを抑制できる。構成を簡単化でき、電池駆動などの小型でポータブルな波長変換レーザ装置においても有用である。
(もっと読む)
PID制御装置
【課題】装置特性が急激に変化したり、非線形挙動を示す装置であっても、装置を稼働させながら、高精度でPID定数を、自動調整を行う。
【解決手段】装置と、測定手段と、記憶手段と、予測モデルを作成するモデル作成手段と、予測モデルを用いて所定時間先の制御特性値を予測すると共に予測された制御特性値を用いて2以上の評価関数Imを計算する計算手段と、評価関数の2乗和ERNNを最小化するように、PID定数である比例ゲインKp、積分時間Ti、及び微分時間Tdを決定する決定手段と、PID定数に基づいて制御特性値のPID制御を行う制御手段と、を備えたことを特徴とするPID制御装置。
(もっと読む)
デジタル制御装置およびこれに用いる制御用PID定数算出方法
【課題】 1個の調整値の入力により要望のPID定数を自動算出し、所望の制御特性を得ることができるようにする。
【解決手段】 入力部11は制御の制御応答を調整するための調節強度を入力する。パラメータ変換関数部9は調節強度および基礎となるPID定数とを入力値とし、調節強度に応じたPID定数を計算するパラメータ変換関数を有する。制御演算部1はパラメータ変換関数部9で算出された制御用PID定数に基づいて制御値を出力する。
(もっと読む)
制御システム及びその調整方法
【課題】制御システムに迅速応答及び微小誤差となる時に、モータ等被制御体出力信号の超越量を減少すると共に調整の時間を減少させ、これにより制御システムの強健性を達成する。
【解決手段】被制御体により発生された出力信号を制御する制御システムを提供する。該制御システムは主制御ユニットと第1の調整ユニットと第2の調整ユニットとを備えてなり、第1の倍率及び第2の倍率の二つの重みパラメータの調整を介して制御システムの強健性、快速応答を達成すると共に、被制御体出力信号の超越量を消失又はゼロに接近させる。制御システムは目標周波数幅、低周波数干渉への抵抗及び伝達関数への追従の技術的特徴を具備し、主制御ユニット、第1の調整ユニット及び第2の調整ユニットの設計、及び第1の倍率と第2の倍率との二つの重みパラメータの調整により、実機整調の方式で上記の技術的特徴が達成される。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 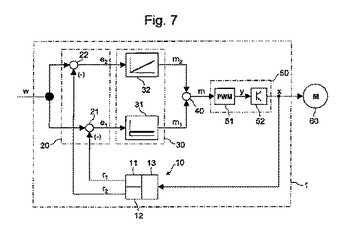 (もっと読む)
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定を早期に適切に終了する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。ここにおいて、i回目の前記比較において得られる誤差(誤差の二乗和:ja(i))の変化量に基づいて、パラメータの修正量(勾配ベクトルの各要素S(i))についての上下限値(±Smax)を設定する(ステップ20)。これによって、上下限値が逐次変更され、適切な制限を掛けることができる。
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定が適切に行われたかを判定する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。パラメータを変化させた時の出力評価関数値の変化量について、比較して強い相関の組み合わせがあるかを全てのパラメータ同士の出力評価関数値の変化量について判定する(ステップ12,13)。強く相関の組み合わせがある場合に物理モデルまたは最適化対象の出力が物理パラメータを真値に漸近させるための十分な情報を含んでいないと、判断する(ステップ14)。
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
141 - 160 / 298
[ Back to top ]