
Fターム[5H115QI04]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 制動の種類 (3,172) | 電気制動 (2,522) | 回生制動 (2,356)
Fターム[5H115QI04]に分類される特許
101 - 120 / 2,356
車両制御装置
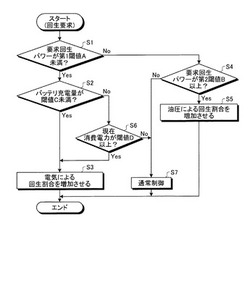
【課題】回生効率を向上できる車両制御装置を提供すること。
【解決手段】車両の運動エネルギーを作動流体の圧力に変換して出力する圧力回生装置と、車両の運動エネルギーを電力に変換して出力する電力回生装置とを備え、車両における回生要求量が大きい場合(S4−Y)は、回生要求量が小さい場合(S4−N)よりも圧力回生装置および電力回生装置のうち圧力回生装置によって車両の運動エネルギーを回生する割合を高める(S5)。
(もっと読む)
車両用駆動装置の制御装置

【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、電気モータ走行モードと内燃機関走行モードとの両立を図ると共にドライバビリティと燃費の向上を可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、ハイブリッドECU100は、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、車両がモータ走行モードで運転されるEV走行モード使用率に応じてエンジン走行モードにおける制御パラメータを変更可能とする。
(もっと読む)
電動車両の走行制御装置
【課題】高効率での電動車両モータ駆動制御を行い、低電費な電動車両向け走行制御装置を提供する。
【解決手段】電動車両の走行制御装置は、実車速とモータの力行及び回生に関する駆動状態とに基づいて、電費効果代をもたらすモータの制駆動に必要な最高効率モータトルクを演算する演算部と、アクセル開度及び実車速に基づいて、モータを最高効率モータトルクで制駆動させて車両を走行させる第1期間と、モータを制駆動させずに車両を惰行させる第2期間との期間配分を演算する演算部と、第1期間における走行と第2期間における惰行とが交互に繰り返されるように、モータをパルス状に制駆動するための目標モータトルクを演算する演算部と、目標モータトルクに応じてモータをパルス状に制駆動することにより車両の走行制御を行う制駆動ECUとを備える。
(もっと読む)
ハイブリッド車輌の制御装置
【課題】ドライバに与える違和感を低減するハイブリッド車輌の制御装置を提供する。
【解決手段】ハイブリッド車輌1を制御する制御装置60は、モータジェネレータ20による回生制動を制御する回生制御部410を備えており、モータジェネレータ20による回生制動が行われる回生可能車速域の下限値VSPBLは、ハイブリッド車輌1の車速VSPとアクセル開度APOによって規定された変速線L2と、自動変速機40の変速に要する変速時間Tgと、に基づいて設定されている。
(もっと読む)
車両制御装置
【課題】下り勾配路途中で停止する場合でも回生エネルギを高効率に回収できる車両制御装置を提供することを課題とする。
【解決手段】勾配路情報から予測される回生エネルギ量に応じて下り勾配路走行前に車両でエネルギを消費する機器を駆動制御する車両制御装置であって、下り勾配路途中での車両の停止情報を取得する停止情報取得手段と、その停止情報に基づいて下り勾配路途中で車両が停止すると判断した場合、下り勾配路途中での車両の停止に応じて回収可能と予測される回生エネルギ量と下り勾配路途中での停止時間中に車両で消費すると予測されるエネルギ量の少なくとも一方に基づいて下り勾配路走行前にバッテリで消費する電力量を決定し、その電力量を消費するように車両の機器を駆動制御する制御手段とを備えることを特徴とする。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、電気モータを作動させる電力を十分に確保することで車両の走行安定性の向上を可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、ハイブリッドECU100は、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、所定の条件が成立したらエンジン11への燃料供給を停止する減速フューエルカットを実行可能とする一方、エンジン走行モードで走行するときに所定の条件が成立してもバッテリ27の充電状態量が所定値より低かったら燃料供給を停止せずにモータジェネレータ14による発電を行う。
(もっと読む)
電気車両制御装置
【課題】本開示では蓄電装置の異常を早期に検出できるようにする。
【解決手段】蓄電装置を持つ電気車において、前記蓄電装置に対する充電用回路に対する駆動指令を充電回数としてカウントする充電回数カウント手段と、前記カウント手段のカウント内容で前記蓄電装置の状態を検出した第1の検出出力を得る第1の検出手段と、前記蓄電装置の膨張状態を測定した第2の検出出力を得る圧力センサ装置と、前記第1の検出出力を前記第2の検出出力で補正する補正手段と、第1の検出出力の補正出力の値に応じて、前記蓄電装置の検査を促す表示出力を得る手段を有する。
(もっと読む)
交差点における進行方向予測装置、進行方向予測方法およびプログラム
【課題】 交差点における車両の進行方向を予測する装置を提供する。
【解決手段】 進行方向予測装置20は、交差点を含む地図情報を記憶した地図情報記憶部14及び車両の現在位置を検出する現在位置検出部12に接続されている。進行方向予測装置20は、過去に交差点を通過した履歴であって各交差点で各分岐方向に進んだ回数に基づく通過情報をその交差点への進入方向別に記憶した交差点通過情報記憶部24と、現在位置検出部12から取得した車両の現在位置のデータに基づいて車両の進行方向を求め、地図情報記憶部14に記憶された地図情報から車両の進行方向にある交差点を読み出す交差点特定部22と、次交差点の通過情報を交差点通過情報記憶部24から読み出し、読み出した通過情報に基づいて次交差点での進行方向を判定する判定部26と、判定部26にて判定された結果を出力する出力部28とを備える。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
電動車両の発進時ずり下がり防止制御装置
【課題】充電制限により回生制動が得られなくても、車両のずり下がりを確実に防止し得る装置を提供する。
【解決手段】充電制限中のDレンジ停車状態で瞬時t1以降、アクセル開度APO(モータトルクTTMA0)を増大させて行う発進操作中(当初はモータトルク指令値TTMA=TTMA0)、車両速度VSP≦-0.5km/hが0.1sec継続するt2に、ずり下がり防止制御を開始(flag_RSAON=1)。一方でTTMAを一定変化率β1で低下させt3に0となし、他方でブレーキトルク指令値TTBRK(ブレーキ液圧指令値TPMC)を一定変化率α1で、TTMA0と同じトルク値となるよう増大させ、摩擦制動により、ずり下がりを防止する。VSP=0が0.1sec継続する、ずり下がり防止完了時t5より、TTMAを一定変化率β2でTTMA0に復帰させ、TTBRK(TPMC)を一定変化率α2(=-β2)で0へ低下させる。
(もっと読む)
電動車両
【課題】 車両の要求電気負荷やバッテリの充電状態に拘わらず回生電力を有効に回収する。
【解決手段】 車両減速検出装置13により車両1の減速が検出された際に、車両1の受入れ可能電力に応じてエンジン2に対するクラッチ16の接続を制御し、受入れ可能電力に応じて慣性発電機15の駆動を選択し、無駄なく慣性発電機15を運用して慣性発電機15による回生可能な電力を車両1の受入れ可能電力に応じて有効に回収する。
(もっと読む)
電動車両用制御装置
【課題】力行状態と回生状態とが切り替わる零クロス時において、各走行モードに応じた電動機の制御が可能な電動車両用制御装置を提供する。
【解決手段】電動車両10用の制御装置34では、電動機12の目標駆動力について、回生側の零近傍値である第1零クロス閾値と、力行側の零近傍値である第2零クロス閾値とを設定し、第1零クロス閾値と第2零クロス閾値との間の零クロス域70の幅を、電動車両10の出力応答性を優先する第1走行モードのときよりも、電費を優先する第2走行モードのときに広くする。また、電動機12の駆動力の変化を、目標駆動力が零クロス域70外であるときよりも、前記目標駆動力が零クロス域70内にあるときに緩やかにして電動機12を制御する。
(もっと読む)
電動車両の制御装置
【課題】バッテリ異常により強電システムを停止した際に、予備バッテリ等を必要とすることなくエンジンを始動させて、発電装置の稼動による車両の走行継続を可能とした電動車両の制御装置の提供を図る。
【解決手段】強電システムの異常によりバッテリ2からの電力供給が遮断された状況下で、制御装置4は、発電装置3のモータジェネレータ6の慣性回転エネルギーによりエンジン5の回転が維持されている状態で燃料噴射,吸気,点火時期等、エンジン5の再始動運転制御を行う。
(もっと読む)
電気駆動車両制御システム、速度制御装置、速度制御方法及び速度制御プログラム
【課題】 減速不作動状態が発生した際にその状態を的確に検出して、電気駆動車両の走行安定性を維持しつつ、走行安全性をさらに向上させる。
【解決手段】 本発明の電気駆動車両制御システム内の速度制御装置18は、所定期間毎に電気駆動車両の平均速度に関する情報を算出する平均化処理部31と、電気駆動車両が減速不作動状態にあるか否かを判別する判別部34とを備える。そして、判別部34は、電気駆動車両に対して回生動作による減速操作が行われた際に、所定期間毎に算出された電気駆動車両の平均速度に関する情報に基づいて、電気駆動車両が減速不作動状態にあるか否かを判別する。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、前記走行モード中に車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から低下させて前記モータの実トルク変化に応じた補正後指令油圧を設定し、該補正後指令油圧を出力する前に前記補正後指令油圧よりも高いプリチャージ指令油圧を出力する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】スロットルバルブ13およびクランク角検出手段35,36が付設された多気筒型エンジン1を搭載した車両の制御装置100,200において、エンジン始動毎のクランク角計測基準位置の検出タイミングのばらつきを無くす。
【解決手段】クランキング開始によりエンジン回転数Neが始動判定値X以上になったときにエンジン1が始動したと判定する始動判定手段と、エンジン1の始動判定後に要求のエンジン回転数Neを確保するために必要な吸入空気量を算出する吸入空気量算出手段と、クランキング開始から所定時間以内にクランク角検出手段35,36からクランク角計測基準信号を受けたときに前記始動判定手段による処理を実行させずに待機し、クランキング開始から前記所定時間の経過後にクランク角計測基準信号を受けたときに前記始動判定手段による処理を実行させる始動制御手段とを実行する。
(もっと読む)
ハイブリッド自動車
【課題】制動時にバッテリにより多くのエネルギを充電できるようにする。
【解決手段】車速Vが高いほど長くなる傾向でブレーキペダルポジションBPが大きいほど短くなる傾向でアクセル開度Accが大きいほど長くなる傾向に、バッテリが充電される際の充電継続時間Tchの予測値としての予測充電継続時間Tchprを設定し(S310)、設定した予測充電継続時間Tchprが短いほど制限が緩くなる傾向にバッテリの入力制限Winを設定する(S320)。そして、設定したバッテリの入力制限Winと出力制限Woutとの範囲内で要求トルクに基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する。
(もっと読む)
ルート探索装置及び車両側装置
【課題】従来のガソリン車向けのエコルート案内では、ガソリン車を除いた新たなタイプの車両には対応しておらず、適切なエコルート案内を行うことは難しかった。
【解決手段】本発明のルート探索装置は、駆動源にモータを使用するタイプの車両から回生電力量に関する情報を取得する取得部と、取得部で取得した回生電力量に関する情報を地図情報に対応付けて記憶する記憶手段と、記憶手段に記憶された回生電力量に基いてルートを探索するルート探索手段と、ルート探索手段で探索された回生電力量に基くルートを走行する際の有料道路の利用料金を算出する算出手段と、該算出された回生電力量に基くルートの有料道路の利用料金を加味してルートを選択する選択手段と、を備えたことを特徴とする。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
101 - 120 / 2,356
[ Back to top ]