
Fターム[5H115TO21]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | アクセル操作量 (2,927)
Fターム[5H115TO21]の下位に属するFターム
アクセル操作の変化量 (487)
Fターム[5H115TO21]に分類される特許
101 - 120 / 2,440
電気自動車の制御装置
【課題】バッテリの長寿命化と充電効率の改善を好適に実現可能な電気自動車の制御装置を提供する。
【解決手段】本発明の電気自動車(1)は、バッテリ(11)の充電電力で力行駆動する電動機(4)を搭載し、下り勾配を走行する際に電動機を回生駆動させてバッテリに充電を行う。その制御装置は、走行路面の勾配情報を取得する手段(17)と、バッテリ(11)の充電量を検出する手段(15)と、勾配継続距離を走行した際にバッテリの充電量が上限充電量となるように、下り勾配を走行中の電動機(4)の回生量を設定する制御手段(26)とを備えたことを特徴とする。
(もっと読む)
セミトレーラ式のハイブリッド車両

【課題】セミトレーラ式のハイブリッド車両に関し、燃費を効果的に改善する。
【解決手段】トラクタ10及びトレーラ20を有するセミトレーラ式のハイブリッド車両1に、トラクタ10に搭載されたエンジン11と、トラクタ10に搭載された第一の電動発電機13と、トレーラ20に搭載され、第一の電動発電機13に電力を供給可能に接続されるバッテリ25と、トレーラ20に搭載され、発電した電力をバッテリ25に供給する第二の電動発電機26と、トレーラ牽引走行時に、走行用の動力源としてエンジン11及び第一の電動発電機13の少なくとも一方の動力を用いるように制御し、かつ、トラクタ単体走行時に、走行用の動力源としてエンジン11の動力を用いるように制御する動力制御手段60,61とを備えた。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を全体として効率的に運転でき、もって燃費向上を達成できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】バッテリ18のSOCが十分であるときに変速機8の変速段を一段飛び越えて切り換えるスキップ制御モードを実行し、通常制御モードで第3速または第5速が選択されるべき領域で第4速または第6速を選択することにより、エンジン2の回転域を低回転側に移行させて燃料消費量を低減する。これにより生じるエンジントルクの不足分を電動機6のトルク増加で補償することにより、運転者の要求トルクを達成する。
(もっと読む)
車両用駆動システム
【課題】モータ走行時における燃費を向上できる車両用駆動システムを提供すること。
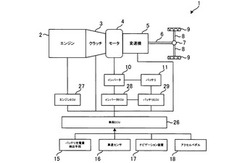
【解決手段】この車両用駆動システム1は、エンジン2と、モータ6と、入力軸41および出力軸42の間の変速比を変更できる変速機4と、エンジン2および変速機4の入力軸41の間に配置されるクラッチ3と、モータ6の接続先を変速機4の入力軸41および出力軸42の間で切り替える接続切替装置7と、接続切替装置7を駆動制御する制御装置9とを備える。また、車両用駆動システム1は、エンジン2を動力源とするエンジン走行と、モータ6を動力源とするモータ走行とを切り替え得る。そして、制御装置9は、モータ走行中におけるアクセル開度θが所定の条件を満たすときに、接続切替装置7を駆動制御してモータ6の接続先を変速機4の入力軸41および出力軸42の間で切り替える。
(もっと読む)
ハイブリッド自動車の制御装置
【課題】一方の変速機入力軸にのみモータを取り付けたデュアルクラッチ式変速機において、変速段の切替時等にクラッチの断接によってドライバに与える違和感を解消することができ、効率よくバッテリを駆動することができるハイブリッド電気自動車の制御装置を提供する。
【解決手段】変速ギア機構4は、エンジン1と第1クラッチ2Aを介して接続され且つモータ3が配置された第1入力軸40Aを備えて複数の変速段を有する第1変速機構4Aと、エンジン1と第2クラッチ2Bを介して接続された第2入力軸40Bを備えて複数の変速段を有する第2変速機構4Bと、を備え、ドライバの加速要求を検出するアクセルポジションセンサ58と、ドライバの加速要求が検出されると、第1変速機構4Aの発進変速段の使用時以外は、クラッチ2A,2Bの同時遮断を禁止するクラッチ制御手段60aを備える。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、電動機の回生制動時にドライバビリティを悪化させることなく、回生エネルギーの効率的な回収を図る。
【解決手段】ハイブリッド電気自動車の制御装置(26)は、電動機(4)の回転数と変速機(5)の変速段Sに基づき算出された基準回生制動トルクTsrが電動機(4)の最大回生制動トルクTmに満たない場合に、ブレーキペダル(13)の踏み込み量、電動機(4)の回転数及び変速機(5)の変速段Sに基づいて算出した上乗せ回生制動トルクTadを基準回生制動トルクTsrに上乗せすることにより、回生制動トルクTrを算出する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、クラッチペダル操作に基づいて変化する内燃機関のトルク及び電動機のトルクのそれぞれの変化タイミングの間のずれの発生を抑制すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。MGトルクが、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方に調整される。摩擦クラッチの実際のミート開始点及び実際のリリース開始点が検出される。MGトルク制限値の決定に使用されるマップに使用されるクラッチのミート開始点及びリリース開始点が、検出された実際のミート開始点及び実際のリリース開始点に一致するように較正される。
(もっと読む)
ハイブリッド電気自動車の充放電制御装置
【課題】車両停車中にゼロトルク制御が行われたときにSOC維持制御を適切に実行でき、もってバッテリのSOCを所定許容範囲内に保持することによりエネルギ効率が悪い強制充電や強制放電の実行を回避できるハイブリッド電気自動車の充放電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてゼロトルク制御を実行していないときには(S10がNo)、クラッチC1及びクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、ゼロトルクを実行中のときには(S10がYes)、電動機3側のクラッチC2のみを接続状態に切り換え(S16)、SOC維持制御を実行してバッテリ5のSOCを所定許容範囲内の中央値である50%近傍の狭い制御幅内で変動させる(S18)。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、モータのトルク制御を用いて駆動輪のスリップの抑制を行なう場合に、該モータトルク制御を適切に終了させるようにする。
【解決手段】走行駆動源としてのエンジン1及びモータ3と、エンジンとモータとの間に介装されたクラッチ2と、駆動輪8の実スリップ率を算出するスリップ率算出手段60bと、駆動輪8のスリップが検出されたら、クラッチの断接状態と、車両の走行状態に基づいて、駆動輪の目標スリップ率を設定するとともに、駆動輪のスリップが検出されたら、実スリップ率が目標スリップ率になるようにモータの出力トルクを制御し、この制御中に、実スリップ率が安定したら制御を緩やかに終了し、ドライバの加速要求があったら制御を速やかに終了する出力トルク制御手段60eとを備える。
(もっと読む)
ハイブリッド電気自動車の停車発電制御装置
【課題】車両停車中にバッテリのSOC低下に応じて停車発電制御を適切に実行でき、もって確実にバッテリのSOCを回復できるハイブリッド電気自動車の停車発電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてバッテリのSOCが充電判定値SOC0以上のときには(S10がNo)、インナクラッチC1及びアウタクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、SOCが充電判定値SOC0未満のときには(S10がYes)、電動機3側のアウタクラッチC2のみを接続状態に切り換え(S16)、停車発電制御により電動機3をジェネレータ作動させてバッテリ5を充電する(S18)。
(もっと読む)
バッテリの出力制御装置
【課題】ユーザの要求に応えつつ、バッテリ全体の寿命低下を抑制する。
【解決手段】車両は、複数の電池モジュール(電池セル)を含んで構成されるバッテリから供給される電力でモータを駆動させて走行する。ECUは、車両要求パワーP<バッテリの定格電力Wstdであると(S10にてNO)、モジュール接続数(モータに接続される電池モジュールの数)Nを最大数Nmaxとしつつ(S11)、バッテリの出力制限を行なう(S12)。一方、車両要求パワーPがバッテリの定格電力Wstdと最大電力Wmaxとの間に含まれる場合(S10にてYESかつS20にてYES)、ECUは、モジュール接続数Nを車両要求パワーPを満たす最小モジュール数N1としつつ(S50)、バッテリの出力制限を緩和する(S70)。
(もっと読む)
バッテリ充放電制御装置
【課題】ハイブリッド電気自動車のバッテリ充放電制御装置に関し、登坂路走行時に、バッテリの温度上昇に起因したバッテリの充放電電流の抑制を不要にできるようにする。
【解決手段】走行用トルクを出力しうるエンジン1及び電動発電機4と、電動発電機4による発電電力によって充電可能なバッテリ40と、をそなえたハイブリッド電気自動車に装備され、車両の前方の道路状況を取得する手段60と、取得された車両前方の道路状況に基づいて車両前方に登坂路があるか否かを判定する手段30aと、登坂路ありと判定しない限りバッテリ温度がバッテリ40の上限温度近傍の温度よりも高くなった場合にバッテリ40の充放電を制限し、登坂路ありと判定したら車両が登坂路に進入するまではバッテリ40の温度が第1の所定温度よりも低い第2の所定温度よりも高くなった場合にバッテリ40の充放電を制限する制御手段30dと、を備える。
(もっと読む)
ハイブリッド電気自動車の変速制御装置
【課題】第2歯車機構のプレシフト要求と走行モードの切換要求とが相前後して発生したとき、これに応じたエンジン吹き上がり制御による燃料消費の増大及び騒音発生を抑制できるハイブリッド電気自動車の変速制御装置を提供する。
【解決手段】電動機単独走行中において偶数歯車機構G2に対するプレシフト要求があったときに(S2,4)、エンジン・電動機併用走行への走行モードの切換要求があるまで待機し、この走行モードの接続要求があると(S6がYes)、インナクラッチC1を接続し、電動機3の駆動力を0にしていくと共にエンジン駆動力を増加させて(S8,10)、電動機3の駆動力の瞬断を防止しつつ偶数歯車機構G2に対するプレシフトを実行し(S12)、同時にエンジン・電動機併用走行への走行モードの切換を完了する(S14)。
(もっと読む)
ハイブリッド電気自動車の回生制御装置
【課題】惰行運転時においてエンジン減速モードとモータ減速モードとの間の制動力の格差に起因する減速感の相違を解消した上で、モータ減速モードでは電動機の回生制御により最大限の発電量を実現できるハイブリッド電気自動車の回生制御装置を提供する。
【解決手段】モータ減速モードによる車両の蛇行運転時において、エンジンと電動機との間のクラッチを切断して、電動機の回生トルクを最大トルクライン上で制御することにより車両の減速エネルギの全てを回生発電に利用すると共に、最大トルクライン上におけるエンジンブレーキ近傍の回生トルクが得られる電動機の回転域でシフトダウンを実行することにより、エンジン減速モードと同様に減速感を実現する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、様々な運転状況下で発生する駆動輪のスリップに対して各運転状況に応じた制御を行ない適切にスリップの抑制を行なう。
【解決手段】走行駆動源としてのエンジン1及びモータ3と、エンジン1とモータ3との間に介装されたクラッチ2と、駆動輪8の実スリップ率を算出するスリップ率算出手段60bと、駆動輪8のスリップが検出されたら、クラッチ2の断接状態と、車両の走行状態に基づいて、駆動輪8の目標スリップ率を設定する目標スリップ率設定手段60dと、駆動輪8のスリップが検出されたら、実スリップ率が目標スリップ率になるように走行駆動源の出力トルクを制御する出力トルク制御手段60eとを備える。
(もっと読む)
車両
【課題】モータを駆動するインバータおよびバッテリとインバータとの間で電圧を変換するコンバータを少なくとも含むモータ駆動ユニットの劣化を精度良く判定する。
【解決手段】車室内の騒音を取得する集音ユニットにより取得された車室内の騒音信号Sからインバータ22のスイッチング周波数fsを基準とした所定範囲内の周波数成分としてパワーコントロールユニット20から発せられる音の成分を示すPCU音信号Spが抽出される(ステップS110)。そして、抽出されたPCU音信号Spの振幅と予め定められた初期発生音の振幅である初期振幅とを比較することによりパワーコントロールユニット20が劣化したか否かが判定される(ステップS120,S130)。
(もっと読む)
四輪駆動車の動力伝達装置及び動力伝達方法
【課題】四輪駆動状態と二輪駆動状態との切り換え機能、及び、高速レンジと低速レンジとの切り換え機能を有する四輪駆動車に対し、構成の簡素化及び小型化を図ることができる四輪駆動車の動力伝達装置を提供する。
【解決手段】遊星歯車機構30のキャリアCAをモータジェネレータ2の出力軸26に、リングギヤRをリヤプロペラシャフト51に、サンギヤSをフロントプロペラシャフト41にそれぞれ接続する。サンギヤSを車体側に固定可能とするスリーブ機構と、フロントディファレンシャルギヤ44と右側車輪4Rとの間のトルク伝達を遮断可能とするディスコネクト機構46とを備えさせる。スリーブ機構を解放状態とし且つディスコネクト機構46を係合状態とすることで4WD−Loモードを成立させる。スリーブ機構を係合状態とし且つディスコネクト機構46を解放状態とすることで2WD−Hiモードを成立させる。
(もっと読む)
電気自動車
【課題】アクセルオフに伴って車両に制動力を付与するときに、バッテリが所定蓄電割合を超えて充電される状態が継続するのを抑制する。
【解決手段】アクセルオフに伴って車両に制動力を付与するとき、蓄電割合SOCが所定割合SOCref以上となると共に蓄電割合SOCの時間変化率kが値0を超えているときには(S100)、要求トルクTr*からモータ駆動トルクTmref(正の値)を減じたものをブレーキトルクTb*に設定して、設定したブレーキトルクTb*(制動力)が電気自動車に付与されるように油圧ブレーキ装置を制御し(S110)、その後、トルク指令Tm*にモータ駆動トルクTmrefを設定すると共に設定したトルク指令Tm*でモータが駆動するようインバータやバッテリの電圧を昇圧する昇圧コンバータを制御する(S120)。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】目的地に到達した時点でバッテリのSOCを確実に確保でき、もって目的地で静粛性の高いモータ走行を行って騒音による周囲への迷惑を未然に防止できるハイブリッド電気自動車の制御装置を提供する。
【解決手段】電動機2の出力確保に重点をおいた高出力バッテリ16に加えて、電動機2の長時間駆動に適するエネルギ密度が高い高容量バッテリ17を搭載し、この高容量バッテリ17のSOCに基づき、高容量バッテリ17によるモータ走行で目的地での宅配を完了可能か否か判定し(ステップS8)、宅配を完了可能なときには、可能な限りEVモードによるモータ走行を継続しながら(ステップS12)、高容量バッテリ17のSOCが不足する場合には適宜HEV充電モードを実行して高容量バッテリ17を充電し(ステップS16)、これにより車両が宅配地域に侵入した時点での高容量バッテリ17のSOCを確保する。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の温度が低いときにその蓄電割合が過剰に高くなるのを抑制する。
【解決手段】電池温度Tbが所定温度未満のときに、電池温度Tbが所定温度以上のときに比してモータからの動力だけを用いて走行する電動走行が行なわれにくくなると共にエンジンからの動力とモータからの動力とを用いて走行するハイブリッド走行が行なわれやすくなるものにおいて、バッテリの蓄電割合SOCに応じて蓄電割合調整用パワーPbsocを設定し(S300)、電池温度Tbが所定温度未満のときに所定温度以上のときに比して小さな値を嵩上げパワーPbηに設定し(S310)、これらの和をバッテリの充放電用パワーPb*に設定する(S320)。そして、ハイブリッド走行によって走行するときには、充放電用パワーPb*を走行用パワーに加えたパワーがエンジンから出力されながら走行するようエンジンと二つのモータとを制御する。
(もっと読む)
101 - 120 / 2,440
[ Back to top ]