
Fターム[5H115UB01]の内容
車両の電気的な推進・制動 (204,712) | 表示、案内 (1,727) | 列車内 (319)
Fターム[5H115UB01]に分類される特許
1 - 20 / 319
車両用表示装置
【課題】 信頼性の高い充電終了時間を表示できる車両用表示装置を提供する。
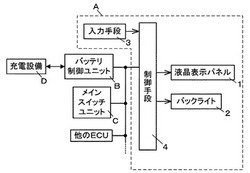
【解決手段】 バッテリを出力源としてモータを駆動することで動力を得る電気自動車の各種情報を表示する液晶表示パネル1と、車両情報を入力してこの車両情報に基づく表示出力を行うように液晶表示パネル1を制御する制御手段4とを備えた車両用表示装置であって、制御手段4は、前記バッテリの充電中において、所定時間毎に複数回入力して得られるバッテリ残容量情報に基づいて、予め設定された前記バッテリの所定容量まで充電されるための充電終了時間を算出し、この充電終了時間を液晶表示パネル1に出力させる。
(もっと読む)
電気自動車

【課題】 モータの永久磁石における減磁等の性能劣化が生じた場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、異常対応モータ駆動制御手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、推定された磁力が設定許容範囲内であるか否かを判定する。異常対応モータ駆動制御手段40は、判定手段39による異常であるとの判定結果に応じて、インバータ装置22によるモータ駆動に制限を与える。
(もっと読む)
電気自動車
【課題】 モータコイルの短絡異常を早期に検知し、車両走行上の問題を回避し得る電気自動車を提供する。
【解決手段】 電気自動車において、車輪2を駆動するモータ6は、3相の各モータコイルの一端が中性点で接続されるスター結線により結線された同期モータであり、モータコイルの短絡異常を検出する短絡異常監視手段95と、この短絡異常監視手段95で短絡異常が検出されると、前記中性点P1から各モータコイルを電気的に切断する異常時切断手段Esを設けた。
(もっと読む)
電気自動車
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法
【課題】蓄電装置からの電力を用いて走行することが可能な車両の電源システムにおいて、不適切な蓄電装置が接続されているか否かを検出することによって、機器の劣化や故障を抑制する。
【解決手段】負荷装置180に電力を供給するための電源システム105は、蓄電装置と、電圧センサ111と、電流センサ112と、ECU300とを備える、ECU300は、検出された電圧および電流に基づいて蓄電装置の内部抵抗値を演算するとともに、演算された内部抵抗値を予め定められた基準値と比較することによって、蓄電装置が、正規の蓄電装置110とは異なる蓄電装置110Aを含んでいるか否かを判定する。
(もっと読む)
地上子検査装置
【課題】変周式地上子とトランスポンダ地上子とを、一台で検査でき、したがって、保守点検作業員の負担を軽減し得る地上子検査装置を提供すること。
【解決手段】変周式地上子を検査する第1の検査回路部1と、トランスポンダ地上子を検査する第2の検査回路部2と、回路切替え手段4とを含む。変周式地上子は、車上に備えられた車上子と結合したとき、車上子から送信された周波数信号を、予め定められた共振周波数に変周するものであり、トランスポンダ地上子は、車上子と結合したとき、デジタル情報である電文として送信するものである。回路切替え手段4は、第1の検査回路部1及び第2の検査回路部2を択一的に選択する。
(もっと読む)
案内システム
【課題】走行用モータで走行移動する電気自動車等の電気車両に搭載される電池に対する電力供給を案内する案内システムを提供する。
【解決手段】本発明の案内システムは、走行用モータで走行する電気車両に搭載される電池に対する電力供給を案内する案内システムであって、第1電池ユニットとレンタルされる第2電池ユニットとを含む複数の電池ユニットと、複数の電池ユニットが装着される複数の電池装着部と、指定された目的地までのルートを案内するナビゲーション装置と、を備え、ナビゲーション装置は、指定された目的地と電池装着部に装着された電池ユニットの電池残量に応じて、第1電池ユニット及び第2電池ユニットに対する電力供給サービスを提供する電力供給ステーションの位置を案内する。
(もっと読む)
ハイブリッド車両の充電量制御装置
【課題】ハイブリッド車両の走行開始前に空調装置を作動させる場合でも、そのときにエンジンを始動して空調装置の作動用の電気エネルギーを生成する必要性を低下させる。
【解決手段】充電量制御装置は、学習処理において、走行前空調運転を行う場所として登録場所を記録し、当該登録場所で走行前空調運転を行う前に当該登録場所で車両を駐車する時刻を登録時刻Bとして記録する。また、車両が当該登録場所を含むエリアの外から中に入ったことに基づいて、当該登録時刻Bを含む制御対象時間帯を算出し、車両が当該エリアの外から中に入った進入時刻が、当該制御対象時間帯内に入っているか否かを判定し(320、330、340)、入っていると判定した場合、バッテリの充電量が第1範囲内に収まるよう制御されている状態から、バッテリの充電量が第1範囲内よりも上限および下限が大きい第2範囲内に収まるよう制御する(350)。
(もっと読む)
エネルギー源管理装置、エネルギー源管理方法
【課題】ハイブリッド車における電力と燃料の両方の使用を考慮した支援を可能とするエネルギー源管理装置、エネルギー源管理方法を提供する。
【解決手段】バッテリ14に蓄電された電力をエネルギー源として回転するモータ18及び燃料タンク7に貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関8を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるナビゲーションシステム12であって、制御部30は、バッテリ14に蓄電された残電力量と、入力された消費許容燃料量とを取得し、残電力量及び消費許容燃料量に基づいて車両が目的地まで走行する際に必要な必要充電時間を算出し、算出した必要充電時間をディスプレイ37に表示させる。
(もっと読む)
倒立二輪車
【課題】モータの負荷が高い場合であっても、安定した動作を行うことができる。
【解決手段】倒立二輪車は、駆動手段にかかる負荷を取得する負荷情報取得手段と、倒立二輪車の姿勢角の情報を取得する姿勢情報取得手段と、駆動手段にかかる負荷と、姿勢情報取得手段により取得された姿勢角と、に基づいて、倒立二輪車が倒立状態を維持できる限界姿勢角と、姿勢角が限界姿勢角に達する前に警告を行うための警告姿勢角と、を求める演算部と、駆動手段を駆動制御する制御部と、を備える。制御部は、現在の姿勢角が警告姿勢角以上に傾動した場合には、ユーザに警告を発する制御を行い、現在の姿勢角が前記限界姿勢角以上に傾動した場合には、ユーザに警告するとともに前記駆動手段の出力を下げる制御を行う。
(もっと読む)
エネルギー源管理装置、エネルギー源管理方法
【課題】ハイブリッド車における電力と燃料の両方の使用を考慮した支援を可能とするエネルギー源管理装置、エネルギー源管理方法を提供する。
【解決手段】バッテリ14に蓄電された電力をエネルギー源として回転するモータ18及び燃料タンク7に貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関8を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるナビゲーションシステム12であって、制御部30は、バッテリ14に蓄電された残電力量と、燃料タンク7内の残燃料量と、入力されたバッテリ14を充電する充電許容時間とを取得し、残電力量と残燃料量と充電許容時間とに基づいて車両が目的地まで走行する際に必要な燃料の補給量を必要補給燃料量として算出し、算出した必要補給燃料量をディスプレイ37に表示させる。
(もっと読む)
車両充電システム、車載装置及びその制御方法
【課題】充電器が多様な形態で設置されていても、充電箇所での充電し忘れを防止できる車両充電システム、このシステムに使用される車載装置及びその制御方法を提供する。
【解決手段】車両外に設けられ、駐車された車両11に対し、充電器23を示す情報G1を送信する通信部と、車両11に設けられ、情報G1を受信する通信部58と、車両に11設けられ、情報G1に基づいて充電器23の存在を報知する表示部56及び音声出力部57とを備えるようにした。
(もっと読む)
電池満充電容量推定装置
【課題】本発明は、電池の満充電容量の推定の精度を高めることができる電池満充電容量推定装置を提供する。
【解決手段】電池満充電容量推定装置70は、CMU22と、BMU30と、電流計35と、OCV−満充電容量特性グラフ90とを備える。CMU22とBMU30とは、電池20のOCVを取得する。CMU22とBMU30と電流計35とは、電池20のSOCを取得する。OCV−満充電容量特性グラフ90は、電池20のSOCが所定値であるときの、電池20の満充電容量とOCVとの関係を示す。BMU30は、取得された電池20のSOCが所定で値あるときに、取得されたOCVとOCV−満充電容量特性グラフ90とに基づいて、電池20の満充電容量を推定する。
(もっと読む)
電気移動体用充電装置
【課題】給電コネクタの受電コネクタへの非ロック状態を、簡単な構成で検出して、利用者に知らせることのできる電気移動体用充電装置を提供する。
【解決手段】給電コネクタ16は、ロックレバー102に設けられた嵌合穴110に嵌合し得る可動鉄心30を有するソレノイド26を備えている。可動鉄心の駆動によって開閉される第1のスイッチ42に直列に抵抗44が接続され、この直列回路がソレノイドのコイル28に並列に接続されて抵抗/コイル回路を構成する。充電器12には、抵抗/コイル回路に並列に接続された、電流センサ58と第2のスイッチ60と直流電源62との直列回路からなるセンサ/電源回路と、電流センサの検出電流の値から、コネクタがロック状態にあるか否かを判定するコネクタロック判定部70とが設けられている。
(もっと読む)
サーバ装置、及び電動車両の充電支援方法
【課題】変圧器から供給される電力を利用して電動車両の充電を行うにあたり、電動車両の充電を効率よく行えるようにする。
【解決手段】ナビゲーション装置209を備える電動車両(電気自動車2)、及びナビゲーション装置310を備え電動車両を充電するための充電器31を運搬する充電器車3と通信可能に接続されるサーバ装置10を備えた充電支援システム1において、サーバ装置10が、電動車両から送られてくる充電器車3の手配要求を受信し、受信した手配要求に応じて、地域に散在する変圧器4のうちから、電動車両を充電するための電力を供給する変圧器4を選択し、選択した変圧器4が存在する場所である充電ポイントに向かわせる充電器車3を選択し、充電ポイントに関する情報900を、手配要求を送信してきた電動車両、及び選択した充電器車3に送信するようにする。
(もっと読む)
車載機器
【課題】電力で走行する車両のエネルギー効率の良さをわかりやすく表示する車載機器を提供する。
【解決手段】電力で走行する車両に搭載された車載機器において、バッテリー充電時の電力料金に基づいて電力走行時のコストを算出する電力走行コスト算出部と、バッテリー充電時のガソリン価格に基づいてガソリンをエネルギー源にして走行したときのコストを推定するガソリン走行コスト推定部と、を備え、電力走行時のコスト61とともに、ガソリン走行時の推定コスト62を表示する。
(もっと読む)
データ処理装置及びプログラム
【課題】トリガ条件が成立した際にデータ収集先からデータを収集するデータ収集装置において、トリガ条件の成否判断に要する時間を短縮する。
【解決手段】ステートマシン合成部102は、2以上のトリガ条件に対して2以上のステートマシンを生成した場合に、2以上のステートマシンに含まれるステートの各々を接続するポインタを設定し、ポインタごとに対応するトリガ条件又はトリガ条件から派生する条件を関連付け、各ポインタに関連付けられている条件に基づき、実際には発生しない遷移を表しているポインタを削除して2以上のステートマシンを統合する。ステート遷移・計測収集指示部105は、統合された1つのステートマシンにて2以上のトリガ条件の成否判断を行うことができ、トリガ条件が多数になっても、トリガ条件の成否判断を迅速に行うことができる。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】目的地に到達した時点でバッテリのSOCを確実に確保でき、もって目的地で静粛性の高いモータ走行を行って騒音による周囲への迷惑を未然に防止できるハイブリッド電気自動車の制御装置を提供する。
【解決手段】電動機2の出力確保に重点をおいた高出力バッテリ16に加えて、電動機2の長時間駆動に適するエネルギ密度が高い高容量バッテリ17を搭載し、この高容量バッテリ17のSOCに基づき、高容量バッテリ17によるモータ走行で目的地での宅配を完了可能か否か判定し(ステップS8)、宅配を完了可能なときには、可能な限りEVモードによるモータ走行を継続しながら(ステップS12)、高容量バッテリ17のSOCが不足する場合には適宜HEV充電モードを実行して高容量バッテリ17を充電し(ステップS16)、これにより車両が宅配地域に侵入した時点での高容量バッテリ17のSOCを確保する。
(もっと読む)
電動車両の充電表示装置
【課題】充電時における充電効率を含む充電状態をユーザが容易に視認することができる電動車両の充電表示装置を提供する。
【解決手段】外部電源100から供給される電力によって充電される走行用バッテリ2を備えた電動車両の充電表示装置40であって、走行用バッテリ2の充電中に変化する充電効率を少なくとも含む充電状態が表示される充電状態表示手段41を備える構成とする。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の蓄電割合の管理の様子を運転者が把握できるようにする。
【解決手段】エンジンから出力される動力とモータから入出力される動力とを用いて走行するハイブリッド走行によって走行するときには、バッテリの蓄電割合SOCが目標割合SOC*に近づくと共に要求トルクによって走行するようエンジンと二つのモータとを制御する。そして、このときには(S710)、バッテリの蓄電割合SOCを示す蓄電割合情報と目標割合SOC*を示す目標割合情報とをディスプレイ90に表示する(S730)。これにより、蓄電割合情報と目標割合情報とを運転者が把握できるようにすることによってバッテリの蓄電割合SOCの管理の様子を運転者が把握できるようにすることができる。
(もっと読む)
1 - 20 / 319
[ Back to top ]