
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
4,021 - 4,040 / 12,590
データ転送システムおよびナビゲーション装置
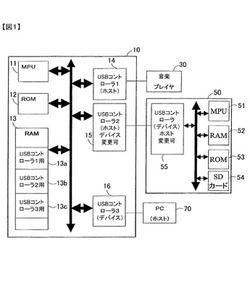
【課題】アイソクロナスデータ転送とバルク転送とが並行して行われる場合のバルクデータ転送速度を改善する。
【解決手段】ナビゲーション装置10には、ホスト設定でのみ使用されるUSBコントローラ14を介して音楽再生用電子機器30が接続され、ホスト/デバイス設定切替可能なUSBコントローラ15を介して携帯電話50が接続されている。音楽再生用電子機器30から音楽データをアイソクロナス転送で取得するとともに、携帯電話50から文字データをバルク転送で取得する際、文字データ受信用USBコントローラ15をホスト設定からデバイス設定に切換えるとともに、携帯電話50の携帯USBコントローラ55をデバイス設定からホスト設定に切換える。携帯電話50からのライト要求と書込データを受信すると、ナビゲーション装置10側ではナビMPU11によりデータをRAM13に転送する。
(もっと読む)
車両用運転支援装置および運転支援方法

【課題】対象となる移動障害物の運動状態が別の障害物に影響されて変化することが予想される場面においても、適切な運転支援を可能とする運転支援装置を提供すること。
【解決手段】自車の走行状態を検出する自車状態検出手段11と、自車の周囲に存在する障害物を検出する障害物検出手段12と、検出した障害物のうち、移動している障害物である移動障害物と、静止している静止障害物とを識別する移動障害物識別手段13と、自車が、検出された全ての移動障害物および静止障害物に接触しないような進行経路を算出する進行経路算出手段20と、算出された進行経路に基づいて、運転支援を行う運転支援手段と、を備える車両用運転支援装置であって、前記進行経路算出手段20は、移動障害物の進行経路を算出した後に、算出された該移動障害物の進行経路に基づいて、自車の進行経路を算出することを特徴とする車両用運転支援装置。
(もっと読む)
車両周辺監視装置
【課題】カメラのレンズの特性や車体の形状に影響されず、簡易な構成でどのカメラからの画像が表示されているかを分かりやすく示す車両周辺監視装置を提供する。
【解決手段】車両に搭載され、当該車両の周囲を撮影する複数の車両周囲撮影手段と、車両周囲撮影手段が撮影する車両周囲画像を表示する表示器と、表示器に車両周囲画像を表示する要求が発生したか否かを判定する表示要求判定手段と、表示要求が発生したと判定され、表示器に、該表示要求に対応する車両周囲画像を表示する際に、該車両周囲画像を撮影した車両周囲撮影手段の搭載位置を識別可能とするための視覚効果を適用して該表示器に該車両周囲画像を表示する表示制御手段と、を備えることを特徴とする車両周辺監視装置として提供可能である。
(もっと読む)
車両周辺表示装置
【課題】違和感の少ない情報を表示すると共に、早期から確実に注意すべき物体を示すことができる車両周辺表示装置を得る。
【解決手段】車両1に搭載され、車両1の周辺を撮影するカメラ2,4と、カメラ2,4により撮影した画像を表示するモニタ6とを備える。カメラ2,4により撮影されている画像に含まれている物体を検出し(S200)、物体の検出に対する信頼の程度に応じた信頼度を算出する(S500)。カメラ2,4により撮影された画像を表示する際に、画像に含まれる物体の信頼度に応じて物体の強調表示を行う(S900)。その際、カメラ2,4により撮影された物体の画像と予め記憶されたテンプレートとの差分が小さいときに、物体を大きな信頼度として算出する。
(もっと読む)
車両用無線通信装置
【課題】CSMA方式の車両用無線通信装置において、交差点付近で生じる送信パケットの衝突を減少させて、交差点へ接近中の車両がデータを送信できなくなるのを防止する。
【解決手段】アクセス制御で送信権を取得してデータ送信を行った後、次のアクセス制御を開始するまでの送信間隔(送信頻度)を、車両進行方向前方の交差点(B)までの距離に基づき、その距離が長いほど長くなるように設定する。この結果、車両が交差点に近づくに連れてデータ送信の頻度が高くなり、車両が交差点を通過すると、データ送信の頻度が最低頻度にまで低下する。よって、交差点付近で各車両からの送信パケットが衝突するのを抑制できる。また、交差点を通過した車両からのデータ送信よりも、交差点に接近中の車両からのデータ送信を優先させることができるため、交差点に接近中の車両は、周囲の車両に自車両の情報を提供して、他車両との衝突を回避することができる。
(もっと読む)
車両走行制御装置
【課題】 主要道路を走行中にナビゲーション装置などの自車両が走行環境を取得する手段によって主要道路を退出しようとしたと判断された場合に、運転者に与える違和感を少なくすることができる車両走行制御装置を提供する。
【解決手段】 走行制御ECU1は、目標車速設定部12で設定された車速に基づいて、ACC制御部13によって車速を制御する。加速意思取得部11では、運転者の加速意思を取得している。目標車速設定部12において、車両が高速道路の本線を走行中であるにも係わらず、誤って退出路を走行していると判定することがある。この場合、目標車速を低く設定して加速を抑制するが、このときに加速意思取得部11が運転者の加速意思を取得した場合には、目標車速を低くせず、加速の抑制をキャンセルする。
(もっと読む)
駐車支援装置
【課題】精度の高い駐車区画検知機能を有するとともに、ドライバにとって利便性の高い駐車支援装置を実現することを目的とする。
【解決手段】第一及び第二の距離測定センサをそれぞれ車両に搭載し、前記第一の距離測定センサの出力情報と自車両位置演算手段の演算結果とに基づいて隣接車両の存在領域を特定し、隣接車両が存在しない駐車可能区画の形状と、自車両に対する相対的な位置ならびに傾きを演算する駐車区画検知手段を備えると共に、前記駐車区画検知手段により演算された駐車可能区画の自車両に対する相対的な位置ならびに傾きを前記第二の距離測定センサの出力情報に基づいて補正する駐車区画補正手段を備えた駐車支援装置である。
(もっと読む)
施錠装置、無線装置、管理サーバ、エリア提示方法、エリア管理方法
【課題】
本発明の目的は、利用者にとって便利なエリア提示を行うことである。
【解決手段】
本発明においては、所定の条件の満足に応じて、車両の扉の施錠を遠隔的に行う施錠装置において、該所定の条件の満足を検出する検出部と、無線信号を受信する受信部と、情報を記憶する記憶部と、該検出をトリガとして該受信部が受信した無線信号に含まれるエリア情報を該記憶部に書き込む制御をする制御部と、該記憶部に記憶された該エリア情報を出力する出力部と、を備えたことを特徴とする施錠装置を用いる。
(もっと読む)
車両案内装置、車両案内方法および車両案内プログラム
【課題】車両のセンサを利用して効率よく監視をすることができなかった。
【解決手段】他車両に搭載された他車両センサの監視範囲を示す他車両センサ情報を取得し、自車両に搭載された自車両センサの監視範囲を示す自車両センサ情報を取得し、前記他車両センサの監視範囲と前記自車両センサの監視範囲とによる総監視範囲が最も広くなる駐車位置に前記自車両を案内するための情報を出力する。
(もっと読む)
移動体の障害物位置認識方法及び移動体
【課題】小型で低コストの一次元レーザスキャナを用いて、移動体の移動方向とは異なる二次元方向に測定光を走査させ、障害物を位置認識できるようにすること。
【解決手段】移動面A上を移動する移動ロボット1の本体3と移動用走行輪5とを接続する走行輪アーム7のアーム部71,73を、ロータリアクチュエータ75の回転により適宜個別に屈伸させ、本体3をチルト方向に揺動させて、移動面A上の障害物を認識するため外界センサ13が出力する、移動ロボット1の左右方向に走査される測定光を、上下方向にも走査させる。本体3をチルト方向下方に揺動させ外界センサ13で受光した移動面Aからの反射光から割り出した、移動面Aの座標値群のローカル座標系における鉛直座標軸の方向と、加速度センサ153の出力から割り出した重力方向とのずれ角で、ローカル座標系からグローバル座標系への座標値変換用のキャリブレーションデータを得る。
(もっと読む)
目的地設定履歴検索支援装置
【課題】目的地履歴から目的地選択を行なう際に、記録した映像を効率的に出力することにより、ユーザに対し過去に設定した目的地の地点情報をわかりやすく提示する。
【解決手段】目的地設定履歴検索支援装置(ナビゲーション本体装置13の制御部30)は、操作部31による目的地設定操作に基づき録画装置1による録画を開始させ、目的地走行履歴検索表示操作前の任意のタイミングで、目的地周辺の所定時間分もしくは所定距離分の走行映像と、現在地測位センサ2により走行映像に関連付けて測位された走行位置情報とを抽出し、当該抽出された走行映像と走行位置情報とから成る目的地走行履歴を生成して記憶部(目的地走行履歴DB(32A))に記憶し、目的地走行履歴検索表示操作に基づき、記憶部に記憶された目的地走行履歴を検索し、検索結果を、目的地への到達の有無に関する情報により規定される表示形態にしたがい表示部33に表示する。
(もっと読む)
地図表示装置及びプログラム
【課題】押圧を検知できなかった区間のある押圧軌跡でも、ユーザの意図を予測して経路を求めることを可能にする。
【解決手段】経路を表示する地図表示装置において、ノード間を接続するリンクを含む道路地図データを記憶した情報記憶手段(3)と、情報記憶手段に記憶された道路地図データを読み出して道路地図を表示する表示手段(6)と、表示された道路地図上における押圧軌跡を検知し、押圧を検知できなかった非検知区間で隔離した少なくとも2つの押圧軌跡からユーザの意図するリンクをそれぞれ予測するリンク予測手段(4b)と、予測した各リンク間の接続経路を決定する経路決定手段(4c)とを備え、前記リンク予測手段は、押圧軌跡とリンクとのマッチング処理を行うとともに、各押圧軌跡の端点位置近くにおける変曲点の有無に基づいてリンクを予測する。
(もっと読む)
地図関連画像提供装置、地図関連画像提供方法、及び地図関連画像提供プログラム
【課題】装置の処理負荷がかかる可能性を軽減し、所定の基準位置、及び当該基準位置に対応する位置の画像データを提供する。
【解決手段】地図関連画像提供装置は、予め地図情報と、上記地図情報に対応する画像データと、前記画像データ及び当該画像データの撮影位置が関連付けられている撮影関連情報と、複数車線を有する道路について、車線毎に、車線に関する情報を有している車線対応情報を保持し、車線対応情報を用いて画像データの検索を可能としているので、所定の表示基準位置の画像データだけでなく、上記表示基準位置に対応する反対車線上で撮影された画像データについても取得及び表示することができる。
(もっと読む)
経路導出装置、車両制御装置、及びナビゲーション装置
【課題】予測経路の導出精度を向上させることが可能な経路導出装置、その経路導出装置を備えた車両制御装置、及びナビゲーション装置の提供。
【解決手段】経路予測処理では、搭載車両が前回走行した時の走行経路についての走行経路情報を格納(作成)し(S110)、登録利用者の中から現利用者を特定する(S120)。そして、目的地が未設定であれば(S130:NO)、搭載車両の現在位置、進行方向の方位等を求め、さらに、搭載車両が移動した軌跡(走行経路)を求める(S140,S150)。そして、登録済格納領域に格納されている走行経路情報の中から、現利用者に対応付けられた走行経路情報を、予測経路として抽出し(S160)、予測経路を報知する(S170)。終了指令が受付けられると(S180:YES)、今サイクルでの走行経路についての走行経路情報を作成中格納領域に転送する(S190)。
(もっと読む)
天気情報報知装置および天気情報報知装置用のプログラム
【課題】天気情報のうち有用ものを効率良く取得する。
【解決手段】車両用ナビゲーション装置は、制御回路17は、自車両の進行に伴って変化する近傍基準地(110)から先の案内経路における天気の変化を抽出して(120)表示する(130)。
(もっと読む)
車両用制御装置
【課題】道路状況の変化を迅速且つ適切に地図データに反映させて車両制御を行なうこと。
【解決手段】記憶媒体に記憶された地図データと、自車両の現在位置を特定する現在位置特定手段と、を備え、前記現在位置特定手段により特定された自車両の現在位置を用いて前記地図データを参照し、前記地図データにおいて予め定められている複数の特定地点の一つに自車両が第1の接近程度をもって接近しているときに所定の車両制御を行なう車両用制御装置であって、自車両の状態を取得する車両状態取得手段を備え、前記地図データにおいて予め定められている複数の特定地点の一つに自車両が第2の接近程度をもって接近しているときに、前記車両状態取得手段により取得された自車両の走行状態が、当該特定地点に対応して予め定められている所定条件を満たす場合に、当該特定地点を前記地図データから削除することを特徴とする。
(もっと読む)
ナビゲーションシステム
【課題】車両のナビゲーション装置が使用する地図データが古くても、現在地から目的地までの経路計算や経路案内を極力的確に実行できるようにする。
【解決手段】本発明のナビゲーションシステム1は、ユーザーが所望する目的地を通信センタ3のオペレータへ伝え、情報センタ3のデータベースにアクセスして検索された前記目的地の位置情報を車両のナビゲーション装置2へ送信し、ナビゲーション装置2において情報センタ3から受信した前記目的地の位置情報に基づいて目的地設定し経路計算を行い、この路計算結果をナビゲーション装置2から情報センタ3へ送信し、更に、情報センタにおいて、検索された前記目的地の位置情報に基づいて目的地設定し、経路計算を行い、この経路計算結果と、ナビゲーション装置2から受信した経路計算結果とを比較し、的確な経路案内を実行できるか否かを判断するように構成したものである。
(もっと読む)
車両用ナビゲーション装置及び車両用ナビゲーションプログラム
【課題】本線から導入レーンを経て分岐路に至る導入レーン付き分岐点を有する特別区間での分岐路に対する走行案内を適切なタイミングで行うことができる車両用ナビゲーション技術を提供する。
【解決手段】自車位置を検出する自車位置情報取得手段1と、前記特別区間を自車位置の前方の案内経路から検出する特別区間検出手段4と、自車が本線から前記特別区間の導入レーンに移行したことを検知する導入レーン移行検知手段5と、導入レーン付き分岐点に対する分岐案内を行うとともに、前記導入レーン移行検知手段が自車の導入レーンへの移行を検出したことに応答して、前記分岐路に対する走行案内を行う分岐案内手段62とを備えた車両用ナビゲーション装置。
(もっと読む)
自車位置認識装置と自車位置認識プログラム、及びこれを用いたナビゲーション装置
【課題】自車位置周辺を撮影して得られる画像情報を用いて、自車位置認識処理を行うための自車位置認識装置と自車位置認識プログラム、及びこれを用いたナビゲーション装置を提供する。
【解決手段】自車両100の周囲の画像情報Gを取得する画像情報取得手段10と、自車両100の自車位置情報Lを取得する自車位置情報取得手段11と、交差点情報Cを取得する交差点情報取得手段15と、交差点の中心部を挟んで存在することがある一対の地物の画像認識処理を行う画像認識手段13と、当該一対の対象地物間の中間点と自車両100との距離を交差点距離として導出する交差点距離導出手段14と、自車両100から所定の距離内に中心部が存在する交差点の交差点情報Cに示される中心座標と交差点距離とに基づいて自車位置情報Lを補正する位置情報補正手段16と、を備える。
(もっと読む)
ナビゲーション装置及びプログラム
【課題】よく走行する道路に更新があったときユーザが更新道路部分を走行する機会が得られるようにする。
【解決手段】目的地までの経路を案内するナビゲーション装置において、各道路に対する更新の有無を示す更新情報、前記各道路における更新のあったリンクを走行済みか否かを示す走行情報、及び走行履歴が所定回数以上の道路情報をよく通る道路情報として格納した情報記憶手段(3)と、前記更新情報から前記よく通る道路に関する更新の有無を検知する道路更新検知手段(4a)と、前記走行情報から前記よく通る道路の更新リンクを走行済みか否か判断する走行判断手段(4b)と、前記よく通る道路の更新が有りと検知され、前記よく通る道路の更新リンクを未走行と判断したとき、未走行であることを報知する制御手段(4d)とを備えている。
(もっと読む)
4,021 - 4,040 / 12,590
[ Back to top ]