
Fターム[5H180LL14]の内容
Fターム[5H180LL14]の下位に属するFターム
カーブ、見通し・視界不良箇所 (1,253)
スリップし易い場所(雪道等) (67)
車庫、駐車場、ガソリンスタンド等の近傍 (344)
踏切 (36)
Fターム[5H180LL14]に分類される特許
101 - 120 / 261
運転支援情報提示装置、プログラム、及び運転支援情報提示方法
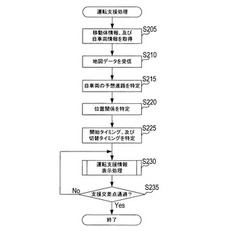
【課題】受容性の高い運転支援情報を提示することができる運転支援情報提示装置を提供する。
【解決手段】支援交差点を走行中の移動体の位置及び進行方向等を示す移動体情報と、予想進路とを受信すると共に、自車両の位置及び進行方向等を示す自車両情報を取得する(S205)。そして、自車両の予想進路を特定し(S215)、自車両と移動体との位置関係を特定する(S220)。そして、支援交差点を通過するまでの間(S235)、特定した位置関係に応じた運転支援情報を表示する(S230)。
(もっと読む)
速度規制システム

【課題】 速度規制区間内において車両の車速制限を行うに際して、前方車両の死角の位置を走り続けることを防止できる速度規制システムを提供することにある。
【解決手段】 速度規制システム1は、インフラ装置2と複数の車両3とに備えられている。インフラ装置2は、ECU21と送受信器22とを備えている。ECU21は、送受信器22が受信した車両A及びその前方を走行する車両Bの車速情報、車両A、Bが速度規制区間の開始地点を通過した時刻及び速度規制区間の規制速度に関する情報に基づき、車両Aが車両Bの死角に位置しないような走行条件(減速パラメータ)を設定する。送受信器22は、ECU21が設定した減速パラメータを車両A又は車両Bに送信する。
(もっと読む)
走行支援装置
【課題】 交差点における接触の慮を低減することが可能な走行支援装置を提供すること。
【解決手段】 走行支援ECU8によって、後続車の有無が判定され、その判定結果に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
(もっと読む)
先頭車両判定装置
【課題】自車両が位置する優先車線と対向又は交差する車線において、優先車線への侵入待機中である待機車両が、待機車両中における先頭車両であるかを精度良く判定する先頭車両判定装置を提供する。
【解決手段】車車間情報処理部16は車車間通信装置14により待機車両にて検出した待機車両の停止時間変化を取得し、周辺車両情報処理部28は待機車両中における先頭車両の停止時間変化を自車両にて検出し、一致車両判定部32は車車間情報処理部16が取得した待機車両の停止時間の変化と周辺車両情報処理部28が検出した先頭車両の停止時間の変化との比較に基づいて待機車両が先頭車両であるか否かを判定する。待機車両の停止時間の変化は、右折待ちで停止・低速時において待機車両からの送信間隔が長くても変化が現われ易いため、当該待機車両が待機車両中における先頭車両であるかを精度良く判定できる。
(もっと読む)
停止目標位置検出装置及び停止目標位置検出方法
【課題】交差点内の位置を停止目標位置とすることをなくすことができる停止目標位置検出装置等を提供する。
【解決手段】車速を検出する車速検出部10と、車両位置を検出する車両位置検出部20と、少なくとも交差点の位置を示す交差点位置情報及び当該交差点を構成する道路情報を含む地図データを記憶した地図記憶部40と、検出された車両の車速情報及び検出された車両の位置情報に基づいて、停止位置候補を検出する停止位置候補検出部50と、道路情報に基づいて、検出された停止位置候補情報を記録する記録部60と、記録された停止位置候補情報に基づいて停止目標位置を設定する停止目標位置設定部70とを備え、記録部60が、車両の交差点通過時において検出された停止位置候補情報のうち、道路情報に基づく個数の停止位置候補を記録する。
(もっと読む)
停止目標位置検出装置及び停止目標位置検出方法
【課題】交差点前後で渋滞が発生しているときであっても、正確な停止位置を検出することができる停止目標位置検出装置を提供する。
【解決手段】車両システムにおけるコントローラ10は、停止位置設定部60によって交差点における複数の停止位置を統計処理して停止目標位置を設定する際に、交差点前後における渋滞の発生状況を推定し、推定した渋滞発生状況に基づいて、渋滞発生時の停止目標位置を判定する。
(もっと読む)
車両位置予測装置
【課題】車両の未来の走行位置を高精度に予測する車両位置予測装置を提供することを課題とする。
【解決手段】車両の走行位置を予測する車両位置予測装置12であって、先行車PV1が存在する場合には先行車PV1に追従して走行し、先行車PV1が存在しない場合には設定車速で走行する機能を有する車両OV1の場合、当該設定車速に基づいて車両OV1の走行位置を予測することを特徴とし、車両OV1が有する機能の作動状態及び先行車の有無情報に基づいて車両OV1の走行位置を予測すると好適である。
(もっと読む)
運転支援装置
【課題】
不要な運転支援動作を低減して適切な運転支援が行える運転支援装置を提供すること。
【解決手段】
交差点において車両の停止について運転支援を行う運転支援装置であって、信号機30に矢灯器31が設置されている交差点に車両が差し掛かる際に、矢灯器31の点灯により車両の進路によって信号停止を促す運転支援の必要性が異なる場合に、運転支援動作の開始タイミングを遅らせて運転支援を実行する。これにより、不要な運転支援動作が行われることを抑制することができる。
(もっと読む)
運転支援装置及び運転支援システム
【課題】路面の損傷を軽減して長寿命化を図ることが可能な運転支援装置を提供する。
【解決手段】車両に搭載されその車両を停止させる停止位置Cを設定し停止制御を支援する運転支援装置1であって、停止位置を定める基準となる基準位置としての停止線位置Aを設定する基準位置設定部11と、基準位置よりも手前にオフセット量Bだけ距離を於いた位置を停止位置Cとして設定する停止位置設定部12と、を有する運転支援ECU10を備える。
(もっと読む)
信号情報の異常判定装置。
【課題】信号機に関する信号情報のデータ異常を精度良く判断する。
【解決手段】車両に搭載される信号情報の異常判断装置10は、路側装置から信号機に関する信号情報を受信する受信機12と、受信機により受信される信号情報に異常が含まれるか否かを判断する異常判断処理部22と、を備える。受信機により受信される信号情報は、当該信号情報のバージョン情報と、信号機に関する信号機属性情報とを含んでいる。異常判断処理部22は、過去に受信した信号情報に含まれるバージョン情報とその後に受信した信号情報に含まれるバージョン情報が一致し、かつ、過去に受信した信号情報に含まれる信号機属性情報とその後に受信した信号情報に含まれる信号機属性情報とが一致しない場合に、信号情報にデータ異常が含まれることを判断する。
(もっと読む)
走行制御計画評価装置
【課題】対象車両の走行制御計画について、将来にまで亘って、且つ周辺車両を広く含めて評価することが可能な走行制御計画評価装置を提供する。
【解決手段】制御対象である自車両Aの走行制御に用いる走行軌跡及び速度パターンを含む走行制御計画を評価する走行制御計画評価装置100であって、自車両Aの走行軌跡及び速度パターンと、自車両Aの周辺車両B,Cの走行軌跡及び速度パターンとを記憶する記憶部110と、自車両A及び周辺車両B,Cの各々について、記憶部110に記憶された所定時間間隔ごとの位置情報及び速度情報を利用して、自車両A及び周辺車両B,Cの各々の所定時間間隔ごとの安全評価値を算出する安全評価値算出部122と、自車両A及び周辺車両B,Cの安全評価値に基づいて、自車両Aの走行制御計画を評価する評価部130と、を備える。
(もっと読む)
除去対象標示体認識装置、除去対象標示体認識方法及び除去対象標示体認識プログラム
【課題】抽出対象外である除去対象標示体を認識する除去対象標示体認識装置を提供する。
【解決手段】除去対象標示体認識装置は、除去対象の標示体を含む画像データを記憶している。カラー領域抽出手段は、上記画像データから除去対象標示体の基礎となるカラーを備えるカラー領域を抽出する。そして、除去対象標示体認識手段は、上記マッチング領域から上記基礎となるカラー及び上記基礎となるカラー以外のカラーの構成に基づいて上記除去対象標示体を認識する。このように、除去対象標示体認識装置は、基礎となるカラー及び基礎となるカラー以外のカラー構成に基づいて標識の種別を判断するので、方面案内標識のように標識内の矢印形状の数や方向が異なる標識でも認識することができる。
(もっと読む)
警報制御装置
【課題】表示部上で操船者の求める条件を適切な設定により、輻輳海域において、数多く航行する他船に対する不要または信頼性の低い警報を制御し、信頼性の高い侵入警報または衝突警報を得ることができる警報制御装置を提供することを目的とするものである。
【解決手段】前記衝突危険度判定部32は、狭水路、フィヨルドなどの輻輳海域に応じた侵入警報および衝突警報を制御する警報制御装置であり、輻輳領域において、煩雑する他船に対する信頼性の低い衝突警報を制御し、区別することができる。
(もっと読む)
安全運転支援方法、車載端末装置、及び運転支援プログラム
【課題】
ドライバの運転操作性を損なうことなくドライバが危険な運転を行おうとした場合には安全運転支援を行う。
【解決手段】
予防安全装置120、130が作動した時、或いは予防安全装置120、130を作動させる車輪速センサ121、ヨーレートセンサ122、ブレーキ圧センサ123のセンサ値が予め設定した閾値を越えた場合に、坂道、非舗装道路、カーブ、駐車場、交差点などの走行場所と、絶対時間、降雪情報、降雨情報、外気温などの走行環境と、車両速度などの車両状態とを車両端末110内の記憶部に記憶しておき、車両が記憶された走行場所を記憶された走行環境下と車両状態で走行しようとした場合に、車載端末110はドライバへの警告通知または車両減速制御によって安全運転支援を行う。
(もっと読む)
車載ナビゲーション装置
【課題】運転者にとって迷いやすい交差点を精度よく検出可能な車載ナビゲーション装置の提供。
【解決手段】車載ナビゲーション装置1は、位置検出器3によって検出された車両の現在地と、入力された目的地との間で誘導経路を形成する。車両が交差点において誘導経路から外れた場合、速度センサ6、Gセンサ7あるいはジャイロスコープ23によって検出された車両状態が所定状態となり、かつ、生体状態検出センサ19、カメラ20あるいはマイク15によって検出された運転者の身体状態が所定の状態となった場合に、運転者の過誤により車両が誘導経路から外れ、運転者にとって迷いやすい交差点であると判定して、誘導経路から外れた交差点を特定するデータを車両外部の情報センタ26に送信する。情報センタ26は、車両からの交差点を特定するデータを収集し、運転者にとって迷いやすい交差点であることを車両に対して知らせるデータを形成する。
(もっと読む)
ETC車載器及びETC車載器における通知方法
【課題】ETCレーンに進入する車輌の後続車輌は、ETCレーンに進入する車輌がETCレーンを通行不可であるか否かの判断ができない。
【解決手段】第2の路側機との認証処理により通行不可である旨の通知があると(S14のN)、車輌間通信部は、主制御部からの指令を受け、後続車輌に対して通行不可である旨の認証を第2の路側機から受けたことを知らせる情報を第2のアンテナから送信する(S18)。つづいて、主制御部は、第1の車輌が第2のETCゲートを通過出来ない旨をドライバに通知する(S20)。
(もっと読む)
車両制御装置
【課題】制動制御後において車両が経路方向とは異なる方向へ発進するおそれを低減することが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、車両を停止させる制動制御を行った後、所定のタイミングで制動制御を解除する制動制御部11を備えている。さらにこの車両制御装置1は、制動制御後に、車両が走行する経路方向を取得する経路方向取得部12と、その制動制御を解除した後の車両の進行方向を推定する進行方向推定部13と、を備え、制動制御部11は、経路方向と進行方向との偏差が所定値よりも大きい場合にその制動制御を保持する。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】青信号時間の延長又は短縮制御が行われる場合でも、交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、青信号の短縮又は延長の時間が確定した後、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間及び所定の標準減速度などに基づいて、自車両が黄信号開始時点で交差点の手前に停止する停止条件及び黄信号の終了時点で交差点に進入する進入条件により決定される危険走行状態にあるか否かを判定する。危険走行状態にある場合、車載装置は、危険走行状態を回避するために、車両を所要の減速度で減速するための処理を行い、あるいは、車両を所要の加速度で加速するための処理を行う。
(もっと読む)
交通規制情報生成装置及び交通規制情報生成プログラム
【課題】画像データ内の道路標識を用いてリンク情報を更新する処理を効率良く実行できる交通規制情報生成装置を提供する。
【解決手段】交通規制情報生成装置は、所定条件(例えば、所定のノード周辺で撮影された画像データ等)に合致する画像データを特定する。よって、交通規制情報生成装置は、道路標識を含む可能性が高い画像データを特定することができる。そして、交通規制情報生成装置は、当該画像データから抽出した道路標識情報に基づいて、道路標識に対応するノードに接続する各リンクに関する交通規制情報を出力する。従って、交通規制情報生成装置は、効率的に道路標識に応じた交通規制情報を出力することができる。
(もっと読む)
運転支援装置
【課題】車両が検出した路面標示に対して制御対象物が複数関連付けられた場合であっても、不要な案内や誤制御が行われることなく、正確な制御対象物に対する運転の補助を行うことを可能とした運転支援装置を提供する。
【解決手段】車両2から所定範囲内に路面標示が存在すると判定された場合に、後方カメラ3によって撮像された画像から路面標示を検出し、検出された路面標示に関連付けられた制御対象物が単数である場合、又は前記関連付けられた制御対象物が複数であって且つそれぞれの物間距離の差が制御実施可否距離以上である場合に、車両から案内及び車両制御の対象となる制御対象物までの対象距離を算出し、算出された対象距離に基づいて、制御対象物に応じた案内及び車両制御を行うように構成する。
(もっと読む)
101 - 120 / 261
[ Back to top ]