
Fターム[5H180LL14]の内容
Fターム[5H180LL14]の下位に属するFターム
カーブ、見通し・視界不良箇所 (1,253)
スリップし易い場所(雪道等) (67)
車庫、駐車場、ガソリンスタンド等の近傍 (344)
踏切 (36)
Fターム[5H180LL14]に分類される特許
21 - 40 / 261
舗装体
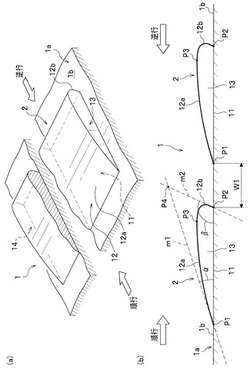
【課題】車両が順行した際には運転手に与える振動を抑えるとともに、車両が逆行した際には運転者に大きな振動を与えて注意を喚起する舗装体を提供することを課題とする。
【解決手段】舗装表面1bにおいて道路の延長方向に複数並設された凸部2を有する舗装体1であって、凸部2は、舗装表面1bに連続し順行方向の上流側に形成された第一面12aと、舗装表面1bに連続し順行方向の下流側に形成された第二面12bと、を有し、舗装表面1bと第二面12bとの内角βは、舗装表面1bと第一面12aとの内角αよりも大きく形成されていることを特徴とする。
(もっと読む)
走行支援装置

【課題】死角がある場合に適切な適正車速を設定する走行支援装置を提供することを課題とする。
【解決手段】車両に搭載される走行支援装置であって、車両前方の死角領域を検出する死角領域検出手段と、死角領域検出手段で検出した死角領域を減少する走行領域を検出する走行領域検出手段と、走行領域検出手段で検出した走行領域での適正車速を設定する適正車速設定手段を備えることを特徴とし、適正車速設定手段は、周辺環境に応じて適正車速を変更すると好適である。
(もっと読む)
車載装置
【課題】一方通行の道路において法令等により禁止されている方向にする車両の走行を適当に防ぎつつ、記憶容量の増加を極力抑えることができる車載装置を提供する。
【解決手段】車載装置1は、車両の現在地近傍にある一方通行の道路を抽出し、抽出された一方通行の道路において通行が許可されている方向を地図データの中から検索する。そして、その検索により得られた通行が許可されている方向に基づいて、車載装置1は車両が走行すべき方向を決定する。車載装置1は、その車両が走行すべき方向と現在車両が走行している方向とを比較し、その二方向が一方通行の道路を異なる方向であるかどうかを判定する。二方向が異なる方向であると判定されたとき、車載装置1は音や画像を用いた報知を行い、運転手に警告を行う。
(もっと読む)
運転支援装置及びプログラム
【課題】地図情報や位置情報に問題がある場合でも、市街地等の目的とするエリアを精度良く判定して、そのエリアに対応した好適な制御を行うことができる運転支援装置及びプログラムを提供すること。
【解決手段】ステップ140では、自車両と歩行者との横位置(横方向における距離)が近いか否かを判定する。ステップ150では、歩行者の数が多いか否かを判定する。前記ステップ140及びステップ150で肯定判断されて進むステップ170では、自車両が市街地を走行していると判断して、安全のために、車速を制限する制御を行う。ステップ160では、自車両と歩行者との横位置が遠く、また、自車両の前方の歩行者の数が少ないので、市街地でなく、市街地から外れた一般道路であると判断して、一般道路に適した制限車速に設定する。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
運転支援装置
【課題】直前の先行車両が自車と無線通信が可能でなくとも、信号機の通過の可否を判定することが可能な運転支援装置を提供する。
【解決手段】運転支援装置10の通信車速度変動情報処理部45が、車車間通信処理装置24が無線通信により取得した前方通信車101の加速度a1と、推定した前方通信車101と自車102との間を走行する車間台数Nとに基づいて自車102の将来の速度Vを予測する。また、交差点通過可否判定部52は、信号情報処理部44が取得した青信号の点灯時間と、通信車速度変動情報処理部45が予測した自車102の将来の速度Vとに基づいて、青信号の点灯時間の経過前に自車102が交差点を通過可能か否かを判定する。このため、直前の車両が無線通信を行えない車両であっても、自車102の将来の速度を予測でき、自車102が交差点を通過可能か否かを判定できる。
(もっと読む)
車載装置
【課題】SA/PAから導入路への逆走を効果的に防止する。
【解決手段】車載装置は、SA/PA300に進入するための導入路302と高速道路301との分岐点311を中心にした扇形の範囲を逆走判定範囲312aまたは312bとして設定し、自車位置310が逆走判定範囲312aまたは312bの内側にあるかどうかを判定する。自車位置310が逆走判定範囲312aまたは312b内にあると判定された期間における走行距離を取得し、その走行距離が閾値を越えている場合に車両が逆走しようとしていると判定し、乗員に警告を行う。
(もっと読む)
通信制御装置及び路側通信機
【課題】エラーの発生を抑制して所定の無線通信成功率を確保することができる通信制御装置を提供することを目的とする。
【解決手段】路側通信機2が無線送信を行う路側用タイムスロットTaで送信する送信情報を、複数のパケットに分割して路側通信機2から送信させる。パケット長と、当該パケット長のパケットで送信した場合の無線通信成功率との関係を示す参照情報を記憶する記憶部24と、前記送信情報が有するデータ長と前記参照情報とに基づいて、当該送信情報を複数のパケットに分割する単位となる単位パケット長Lを決定する決定部23Eとを備えている。
(もっと読む)
車両用制御装置
【課題】ミリ波レーダが開閉バーを物体として検出し、PCSが作動することによって運転者に違和感を与えてしまうこと等を抑制できる車両用制御装置を得る。
【解決手段】ETC車載器10と路側アンテナの通信が完了したときから、車速センサ50によって検出された自車両の速度が所定速度以上になったときまで、物体判定閾値を、開閉バーを無視するように、基準値から開閉バー判定値に変更し、自車両の前方物体からの反射波のピークレベルが物体判定閾値未満の場合、前方物体をノイズと見なし、一方、ピークレベルが物体判定閾値以上である場合、前方物体を目標物体として検出し、前方物体の距離及び相対速度を算出するミリ波レーダ20と、算出された前方物体の距離及び相対速度に基づき、衝突予想時間及び衝突軽減処理閾値を算出し、衝突予想時間が衝突軽減処理閾値未満である場合、衝突軽減処理を行う衝突軽減制御部30とを設けた。
(もっと読む)
通信制御装置、路側通信機及び通信システム
【課題】路側通信機用のタイムスロットで送信する情報の内容に応じた好ましい手段によって情報提供が可能となる通信制御装置を提供することを目的とする。
【解決手段】路側通信機2が無線送信を行う路側用タイムスロットTaが、時分割で割り当てられて通信が行われる。情報分類部23Cは、路側用タイムスロットTaで送信する情報を更新する頻度の高低を判断基準として、当該情報を高頻度更新情報と低頻度更新情報とに分類する。高頻度更新情報と低頻度更新情報とを路側用タイムスロットTa毎の複数のパケットに割り当てて送信させるために、情報割り当て部23Dは、高頻度更新情報を優先してパケットに割り当て、余りの部分に低頻度更新情報を割り当てる。
(もっと読む)
危険箇所推定装置及び危険箇所推定方法
【課題】実際に発生した交通事故に関する情報の蓄積がない場合であっても、交通事故の発生する危険度が高い危険箇所に関する情報を得ることを可能とする。
【解決手段】危険箇所推定装置1では、複数の移動端末の位置情報が位置情報取得部11により取得され、交通モードに示される移動手段が自動車及び徒歩である位置情報の各々が位置情報集計部14によりメッシュ毎に計数され、メッシュ毎に計数された交通モードが自動車である位置情報数及び交通モードが徒歩である位置情報数に基づいてメッシュ毎の危険度を示す危険度指標値が指標値集計部15により生成される。この危険度指標値は、ユーザの所在位置が逐次反映された位置情報に基づいて生成されることとなるので、交通事故に関する情報の蓄積を必要とせず、タイムリーに危険箇所の推定を行うことが可能となる。
(もっと読む)
車両の走行支援システム及び方法
【課題】交差点において安全且つドライバーの意思に沿った車両の走行支援を行う。
【解決手段】走行支援システム(1)は、交差点における車両の走行を支援する。走行状態を検出する走行状態検出手段と、運転操作情報を検出する運転操作情報検出手段と、交差点情報を検出する交差点情報検出手段と、検出された走行状態、運転操作情報及び交差点情報を関連付けて、走行パターンとして記憶する学習手段と、検出された交差点情報が学習済み走行パターンに含まれる交差点情報と同一又は類似である場合に、当該学習済み走行パターンに従って、車両を制御する制御手段とを備える。
(もっと読む)
信号機の点灯状態判断システム及び車両の走行支援システム
【課題】交差点において安全且つドライバーの意思に沿った信号機の点灯状態の判断を行う。
【解決方法】信号機の点灯状態判断システム(1)は、赤色、黄色及び青色の灯器並びに矢灯器を有する信号機の点灯状態を判断し、点灯状態を検出する手段(3、10)と、矢灯器に付随して黄色の灯器が点灯する場合、当該黄色の灯器の点灯タイミングの前後における点灯状態に基づいて、当該黄色の灯器を青色又は赤色の灯器であると判断する手段(10)とを備える。
(もっと読む)
車両用運転支援装置
【課題】信号待ちで停車中の先行車が発進し、後続する車両が追従発進する場合であっても、現在の信号灯色が赤色或いは黄色の場合は、先行車発進報知は行わず、不必要な支援情報の提供を省略することで、運転者に与える煩雑感を軽減する。
【解決手段】信号灯色が赤色或いは黄色と判定され(S3)、且つ信号待ちの先行車が発進と判定され(S7)、且つ先行車が先頭車と判定された(S8)場合、運転者に対して先行車発進報知は行わない(S9)。一方この状態から自車両が発進しようとした場合は(S10)、信号灯色が赤色或いは黄色である旨の注意を促す支援情報を運転者に報知する(S12)。
(もっと読む)
自動停止制御装置及び道路交通情報システム
【課題】自動停止制御装置及び道路交通情報システムに関し、信号機の全赤時間における交差点内の通過を抑制しながら車両をスムーズに通行させる。
【解決手段】インフラ情報検出手段6aで自車両の前方の交差点における出口地点の位置を検出し、信号情報検出手段6bで該交差点で黄色信号が終了するまでの第一時間を検出し、自車両情報検出手段6dで該自車両の位置及び車速を検出する。
また、距離算出手段8aにより、該出口地点の位置と該自車両の位置とに基づいて該出口地点までの第一距離を算出する。
さらに、予測判定手段8bにより、該第一時間と該第一距離と該車速とに基づいて、該黄色信号が終了するときに該自車両が該交差点から脱出するか否かを予測判定する。
該自車両が該交差点から脱出しないと予測された場合には、自動制動手段9により、該自車両の自動制動を実施する。
(もっと読む)
距離推定装置
【課題】従来よりも簡単な構成で距離の推定を可能にする距離推定装置の提供である。
【解決手段】対象物までの距離を推定する距離推定装置の一観点によれば、鏡と、対象物の実像および対象物の実像が映る領域以外の領域に鏡に映る対象物の鏡像を受光するレンズ部とレンズ部が受光した光を画像情報に変換する撮像素子とを有するカメラと、撮像素子が撮像した画像内の対象物の実像と鏡像の位置に基づき対象物までの距離を推定する電子制御ユニットとを有する。
(もっと読む)
車両の衝突回避支援装置
【課題】車両の衝突回避支援装置に関し、最大高さが変化する車両の最高部位が障害物に衝突することを回避もしくは衝突速度を低減できるようにする。
【解決手段】最大高さが変化する車両に装備され、車両前方に位置する障害物Oとの衝突を回避するための衝突回避支援装置において、車両3の最大高さHを検知する最大高さ検知手段11と、車両前方で前記最大高さHと同一高さに位置する障害物Oを検知する障害物検知手段12と、前記最大高さH以下に障害物Oがあることを車両3のドライバに警報する警報手段13とを備えた。
(もっと読む)
光ビーコン車載通信装置
【課題】共通ID番号のデータがDSSS用データのID番号であるかVICS用データのID番号であるかを確実に判別することができるようにする。
【解決手段】光ビーコン車載通信装置1において、送受信装置2の不揮発性メモリ2dは、ID番号の優先順位を、共通ID番号、DSSS固有ID番号の順に記憶し、制御CPU2cは前記優先順位に従って光ビーコンデータを並び替えし、制御装置10は、並び替えられた光ビーコンデータにおいて共通ID番号のデータの直後に前記DSSS固有ID番号のデータが有るときには当該共通ID番号の光ビーコンデータをDSSS用データでのID番号のデータとして判断し、共通ID番号のデータの直後にDSSS固有ID番号のデータが無いときには当該共通ID番号のデータをVICS用データでのID番号でのデータとして判断する。
(もっと読む)
出力制御装置、出力制御方法
【課題】車両やユーザが移動を開始する前に、移動のきっかけとなる情報を自動的に検知して、車両やユーザが停止中に、ユーザ操作等により、表示画面やスピーカなどへ新たな出力がされているとき、その出力を停止もしくは変更する出力制御装置を提供する。
【解決手段】移動検出部101は車両やユーザの停止前の減速状態を検出し、映像入力部102はその減速状態におけるユーザ前方の映像を取得し、視線検出部103はその減速状態におけるユーザの視線方向を取得する。そして、監視対象変化検出部104は、映像と視線方向をもとに、停止する原因となった対象を検出し、停止時点の映像から監視領域を決定する。さらに、監視対象変化検出部104は監視領域の映像から対象の変化を検出し、出力制御部105は表示画面やスピーカなどへの出力を停止させる、もしくは出力内容を変更させる。
(もっと読む)
路面標示認識装置
【課題】従来の路面標示認識装置は、カメラでの撮影画像全体を領域分割した後、2次元平面への投影などの変換処理を行うので、CPU負荷が大きく、また、検知ライン上の明るさの変化位置に基づき路面標示を認識する計算量抑制方法は、自車両前方に他車両が位置し、路面標示の一部を隠蔽した場合、路面標示を正しく認識できない。
【解決手段】画像入力手段で得られた自車両の走行路を含む所定領域を撮影した画像中の、部分領域を監視領域とし監視領域設定手段で設定し、監視領域から、画像特徴を画像特徴抽出手段で抽出し、この特徴抽出手段で得られた特徴と、路面標示モデル記憶手段に予め格納されている路面標示モデルとをHMMを用いてHMM識別手段で比較評価して路面標示の認識を行う。
(もっと読む)
21 - 40 / 261
[ Back to top ]