
Fターム[5H180LL14]の内容
Fターム[5H180LL14]の下位に属するFターム
カーブ、見通し・視界不良箇所 (1,253)
スリップし易い場所(雪道等) (67)
車庫、駐車場、ガソリンスタンド等の近傍 (344)
踏切 (36)
Fターム[5H180LL14]に分類される特許
121 - 140 / 261
運転支援装置

【課題】車両が検出した路面標示に対して制御対象物が複数関連付けられた場合であっても、不要な案内や誤制御が行われることなく、正確な制御対象物に対する運転の補助を行うことを可能とした運転支援装置を提供する。
【解決手段】車両2から所定範囲内に路面標示が存在すると判定された場合に、後方カメラ3によって撮像された画像から路面標示を検出し、検出された路面標示に関連付けられた制御対象物が単数である場合、又は前記関連付けられた制御対象物が複数であって且つそれぞれの物間距離の差が制御実施可否距離以上である場合に、車両から案内及び車両制御の対象となる制御対象物までの対象距離を算出し、算出された対象距離に基づいて、制御対象物に応じた案内及び車両制御を行うように構成する。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法

【課題】危険走行領域を回避して交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間及び所定の標準減速度などに基づいて、自車両が交差点の手前に停止するための停止条件及び交差点に進入するための進入条件により決定される危険走行状態にあるか否かを判定する。車載装置は、危険走行状態にあると判定した場合、危険走行状態を回避するために、例えば、車両を停止線に停止させる場合には、車両を緩やかな減速度で減速するための処理を行い、あるいは、車両を交差点に進入させる場合には、車両を緩やかな加速度で加速するための処理を行う。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】交差点での自車両の進行方向に依らず危険走行領域を回避して交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、自車両の交差点での進行方向及び右折用の信号(例えば、青矢信号など)の存否情報に基づいて、自車両の走行状態(例えば、危険走行状態)を特定する。例えば、車載装置は、青矢信号がある交差点で自車両が右折するか、あるいは、直進するか基づいて、その走行挙動に応じた危険走行状態を特定する。車載装置は、停止線(交差点)までの距離、自車両の速度、信号機の信号情報などに基づいて、自車両が危険走行状態にあるか否かを判定し、危険走行状態にある場合、危険走行状態を回避するために、可減速制御を行う。
(もっと読む)
運転支援装置
【課題】重複した運転支援を抑制して適切な運転支援が行える運転支援装置を提供すること。
【解決手段】信号機に基づく第一運転支援と他の移動体に基づく第二運転支援を行う運転支援装置であって、第一運転支援により信号機が赤表示となることから信号停止位置での停止を促す運転支援を行う場合に、他の車両、歩行者、自転車の状況による第二運転支援を行わないようする(S22、S24)。これにより、複数ある運転支援処理のうち不要な運転支援を行わないようにして、適切な運転支援が可能となる。
(もっと読む)
信号機検出装置、信号機検出方法及びプログラム
【課題】自車両前方の信号機を正確に検出することが可能な信号機検出装置、信号機検出方法及びプログラムを提供する。
【解決手段】CPU41は、撮影画像上における色情報が近似する複数の発光体の点灯周期が一致する場合には、この複数の発光体を自車両の進路上の対となるLED信号機として検出する(S11〜S18:YES〜S21)。また、CPU41は、撮影画像上における色情報が近似する複数の発光体の点灯周期が一致しない場合には、撮影画像上におけるこの複数の発光体の相対位置関係と自車位置及び自車方位とから、この複数の発光体の交差点上における相対位置関係を算出し、地図データ上の対となるペア信号機の相対位置関係と近似若しくは一致した場合には、この複数の発光体を自車両の進路上の対となる電球式の信号機として検出する(S11〜S18:NO〜S21)。
(もっと読む)
警告警報システムおよび方法
本発明は、接近対象物と、警報が発せられる位置であって、警報が対象物の位置および警報位置付近の対象物の位置に一部基づいて発せられるものである位置との間の少なくとも1つの無線通信リンクを使用して警報を発するシステムおよび方法を提供する。本発明の一態様は、対象物、例えば、運搬手段からの位置情報を含む通信を警告ノードで受信するステップと、警報ノードに対して警告情報を無線で通信するステップと、警報装置が警報を発するステップとを含む。好ましくは、警告ノードは、複数の運搬手段および複数の警報ノードと通信し、運搬手段の少なくとも1つから受信した位置情報および警報装置の位置に一部基づいて、警告情報を複数の警報ノードのどれに通信するかを決定する。 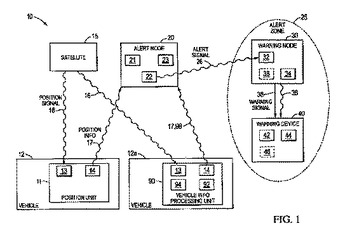 (もっと読む)
(もっと読む)
信号機検出装置、信号機検出方法及びプログラム
【課題】自車両前方のLED信号機の発光部を確実に検出することが可能な信号機検出装置、信号機検出方法及びプログラムを提供する。
【解決手段】前方撮像用カメラ53の撮影周期が、進行方向前方のLED信号機の発光部の点灯周期の1/2より長く、且つ、進行方向前方のLED信号機の発光部の点灯周期と、前方撮像用カメラ53の撮影周期とが同調する場合には、CPU41は、前方撮像用カメラ53の撮影画像がLED信号機の発光部が消失した撮影画像になった際に、前方撮像用カメラ53の撮影タイミングをLED素子の消灯タイミングとずらすように指示する制御信号をカメラECU51に対して出力する(S11〜S17:NO〜S19:YES〜S20)。
(もっと読む)
車両の運転支援装置
【課題】自車両から見て死角に入っている物標の情報を取得することにより、車両運転の安全性の向上を図ることができる車両の運転支援装置の提供。
【解決手段】自車両Aの周辺の物標情報を検知する検知手段1と、他車両Dが検知した当該他車両Dの周辺の物標情報を取得する取得手段2と、取得手段2が取得した他車物標情報の中から、検知手段1が検知した自車物標情報に含まれない死角物標情報を抽出する抽出手段3と、抽出手段3が抽出した死角物標情報を自車両Aの運転者に報知する報知手段4と、自車両Aの位置、走行速度、走行方向等の自車情報を検出する自車情報検出手段5を備えている。
(もっと読む)
路車間通信システム、車載機、車両および交通信号制御機
【課題】信号機の表示に関する信号情報を提供する路車間通信システムにおいて、当該信号情報の信頼度を判断した上で、当該信号情報を活用して車両の制御等を行う。
【解決手段】交通信号制御機1Aは、信号灯器2Aaの現在の信号灯色やその継続時間、及び将来表示する予定の信号灯色やその継続時間等に関する信号情報を、通信領域Qに送信している。道路Rを走行する車両Cの車載機6は、前記通信領域Qにおいて前記信号情報を受信する。この場合、通信領域Q内の第1の地点において受信した第1の信号情報と、通信領域Q内の第2の地点において受信した第2の信号情報とを比較することで、信号情報の信頼度のレベルがどのようなものかを把握することができる。得られた信頼度に基づいて、車両Cの安全運転支援動作が実行される。
(もっと読む)
路車間通信システム
【課題】路車間通信の路上装置から車両へのデータ送信において、限られた無線通信帯域で、多数の情報をリクエストされた場合に、情報の到達確実性やリアルタイム性を維持しつつ、必要な情報を適宜選定する。
【解決手段】交通信号制御機1Aは、交差点Aに接続する道路R上の通信領域に対して所定の周期毎に、路側送信データを送信している。この場合、その路側送信データには、全車両に共通する共通情報と、1又は複数の車両にリクエストされた個別情報が含まれている。交通信号制御機1Aは、優先度やデータサイズ等に応じて、送信する共通情報と個別情報の種類を適宜選定した上で、その送信順序や送信回数等を決定して、送信するようにした。これにより、各情報に要求される分解能等の要求性能を満たしつつ、無線通信帯域を有効に活用することができるようになる。
(もっと読む)
車両用警報装置
【課題】運転者が実際に車両を運転しているときに、その運転者に適した安全運転支援を行うことができる車両用警報装置を提供すること。
【解決手段】交通情報取得部93にて車両の外部における信号機情報を取得(S10、S11)し、走行情報取得部92にて車両の走行状態に関する走行情報を取得(S12)し、信号機情報と走行情報とから交差点を安全に通過可能か否かを判定し(S13)、安全に通過可能でない場合は、記憶装置50に記憶されている過去の運転操作記録を参照することによって現在の信号機情報と現在の走行情報とに近似する信号機情報と走行情報とを検索し(S14)、警報をうけた場合の運転者の運転操作を推測(S15)し、近似する信号機情報及び走行情報に関連付けられた操作情報に応じて(S16)警報内容を決定する(S17、S18)。
(もっと読む)
運転支援装置、運転支援装置を搭載した自動車、および運転支援方法
【課題】他車両の姿が物陰に隠れていて見えない場合であっても、他車両の音源位置を視覚的に表示して、視覚的に容易に認識できるようにした運転支援装置、運転支援装置を搭載した自動車、および運転支援方法を提供する。
【解決手段】自車両の周辺物体位置推定手段と、音源位置推定手段と、音源位置表示手段を設け、周辺物体位置推定手段で周辺物体位置を推定し、音源位置推定手段で音源位置を推定し、音源位置表示手段で、周辺物体位置と音源位置を同時に表示した。また、音源位置と前記周辺物体位置とを照合し、音源位置と前記周辺物体位置が一致している場合は、音源パターンを示す第一の表示情報を音源位置または音源位置の近傍に表示し、音源位置に対応する周辺物体がない場合には、音源パターンを示す第二の表示情報を音源位置または音源位置の近傍に表示するようにした。
(もっと読む)
障害物検知装置
【課題】 狭い通路等を低速で通過する際に建物の角や柱との接触を確実に防止する障害物検知装置を提供する。
【解決手段】 車両の側面に設けられたテレビカメラ12が少なくとも車両の側方から斜め前方を含む第1領域R1に存在する物体を撮像し、車両Vの前部側面に設けられたソナー14が第1領域R1の一部である第2領域R2に存在する物体の距離を測定すると、相対位置算出手段M1が、テレビカメラ12で撮像した物体の方向およびソナー14で検知した該物体の距離から車両に対する該物体のエッジの相対位置を算出し、相対位置トレース手段M3が、移動軌跡算出手段M2で算出した車両の移動軌跡に応じて物体の特徴部の相対位置をトレースするので、運転者は車両が接触する可能性のある障害物となる物体の特徴部の位置を逐次認識して接触を回避することができる。
(もっと読む)
運転支援方法及び運転支援装置
【課題】処理速度も速く、しかも、精度も落とすことなく安価に各種矢印信号灯を判別し、適切な運転支援を実行する運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援装置1の画像プロセッサ8が矢印信号灯を付設した信号機の赤色信号灯の点灯を判定すると、CPU2は、矢印信号灯が点灯していると推定する。そして、自車位置に基づいて前方の信号機の信号機データSDを読み出して、矢印信号灯の対象走行レーンデータと自車両が走行している自車両走行レーンに基づいて、CPU2は該矢印信号灯が自車両に対するものかどうかを判定する。対象走行レーンデータと自車両走行レーンが一致したとき、種別データの矢印方向を示す方向データに基づいて、点灯した矢印信号灯に即した走行をアナウンスする。
(もっと読む)
進入検出器及び警報機を備えた歩行者用交差路
組立て及び解体が容易で、保守費用が少なく、独立的且つ移動可能な建設部材で構成され、進入検出器、警報デバイス、電源システム、蓄電器、及び電子デバイス(回路機器など)が装備され、それによって、交差路ゾーンで、歩行者、車両、又は両者の検出を行い、運転手自身及び歩行者自身のどちらにも、それぞれが前記交差路又はその近傍に進入したことを知らせ、道路をより安全にし、荒れ模様の天候に起因して歩行者が事故に遭遇するリスクを低減し、音響的汚染を低減し、且つ公共道路をより多用途に用いられるようにし、更に、本発明を構成する様々なエレメントを全面的に又は部分的に導入した形態、或いは、例えば前記エレメントを内蔵する固定交差路用の全体的シェルター又は部分的シェルターの形態をなす固定歩行者用交差路で使用されることを特徴とする、進入検出器及び警報機を備えた歩行者用交差路。  (もっと読む)
(もっと読む)
渋滞報知システム
【課題】渋滞発生時に、渋滞最後尾の車両12より後続の車両12の運転者に対して渋滞最後尾の位置を報知し、事故防止につなげることができる渋滞報知システム21を提供する。
【解決手段】車両12が走行する道路11に沿って、複数の信号灯22と、道路11上の車両12の走行状態を検出する複数の車両検出部とを設置する。制御部は、隣り合って設置された車両検出部23で検出する車両12の走行状態から車両12の渋滞最後尾を判別する。制御部で、渋滞最後尾を判別したら、渋滞最後尾付近に設置された信号灯22の点滅により渋滞最後尾であることを報知する。
(もっと読む)
事故防止システム
【課題】専用の情報送受信用端末を備えていない車両や通行者に対しても、道路から工事現場へ工事車両が進入することによる危険を通知し、当該工事車両との衝突事故を予防することができる事故防止システムを提供する
【解決手段】工事現場101の進入口102から車線111に沿った上流側には、無線基地局1が設置される。さらに、この無線基地局1から上流側には、表示器3が設置される。無線基地局1が工事用車両201のETC車載器2から個体識別番号を取得し、予め設定した個体識別番号と一致することを検出すると、無線基地局1は、表示器3に対して、工事車両201が減速して工事現場101に進入する旨の表示制御を行う。表示器3は、この表示制御に従い、車線111の上流側に向けて表示を行う。
(もっと読む)
駐車支援装置
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
車両ランプ制御装置
【課題】車両に搭載されるランプを制御する車両ランプ制御装置において、ランプの消費電力を低減することを目的とする。
【解決手段】車両に搭載されるランプの点灯状態を制御する車両ランプ制御装置であって、車両ランプ制御装置を搭載する自車両とは異なる他車両に関する他車両情報を取得する情報取得部と、自車両の走行状態を検知する検知部と、自車両の走行状態と、他車両情報によって示される他車両の走行状態と、に基づいて、自車両と他車両との間の位置関係を解析する解析部と、解析部の解析結果に基づいてランプの点灯状態を制御する制御部と、を備えることを特徴とする。
(もっと読む)
車両用駆動力制御装置
【課題】車両の位置ないしは車両と自動車専用道路の本線に対して接続される接続道路との位置関係を正確に判定して車両の駆動力を制御する。
【解決手段】自動車専用道路の本線から分岐して接続される接続道路と車両との位置関係に基づいて、前記車両の駆動力を制御する車両用駆動力制御装置であって、運転者による前記自動車専用道路の本線と前記接続道路との間の走行路の変更意図を検出又は推定する手段(S3)と、前記車両が前記自動車専用道路の本線と前記接続道路との間で走行路を変更したことを検出する手段(S4)とを備え、前記走行路の変更意図が検出又は推定されている間、又は前記走行路の変更意図が検出又は推定されている状態から予め設定された時間内に、前記車両が前記走行路を変更したことが検出されたときに、前記車両の駆動力の制御を許可する(S5)。
(もっと読む)
121 - 140 / 261
[ Back to top ]