
Fターム[5H180LL14]の内容
Fターム[5H180LL14]の下位に属するFターム
カーブ、見通し・視界不良箇所 (1,253)
スリップし易い場所(雪道等) (67)
車庫、駐車場、ガソリンスタンド等の近傍 (344)
踏切 (36)
Fターム[5H180LL14]に分類される特許
41 - 60 / 261
通信制御装置及び通信制御システム
【課題】受信したデータをリアルタイムに送信することができる通信制御装置及び通信制御システムを提供する。
【解決手段】転送部13は、制御部10の制御の下、受信バッファ12に記憶したデータをブロック毎に送信バッファ14へ転送する。送信部15で1ブロックのデータを送信している間に、複数のブロックのデータを受信部11で受信し、受信したデータをブロック毎に受信バッファ12に記憶する。制御部10は、送信部15で1ブロックのデータの送信が完了したか否かを判定する判定部としての機能を備える。制御部10は、1ブロックのデータの送信が完了したと判定したときは、その間に受信した複数のブロックのうち、直近に受信した1ブロックのデータのみを送信し、他のブロックのデータは送信しないように制御する。
(もっと読む)
車両制御装置および車両制御方法

【課題】 車速変動の伝播を抑制することができる車両制御装置および車両制御方法を提供する。
【解決手段】
本発明に係る車両制御装置および車両制御方法においては、交通流量が最大化される自車11の減速制御をおこなう際、自車11と先行車両12との車間距離が所定の範囲内にあるときには、交通流量が最大化される車間距離と車速に自車を減速制御し、自車11と先行車両12との車間距離が所定の範囲内にないときには、交通流量が最大化される速度のみに自車を減速制御する。それにより、交通流量が最大となる車間距離をサグ部に到達するまでに確保できない事態や維持できない事態が生じた場合であっても、少なくとも交通流量が最大となる車速となるように自車11を減速制御するため、車速変動の伝播が効果的に抑制され、サグ渋滞の抑制につながる。
(もっと読む)
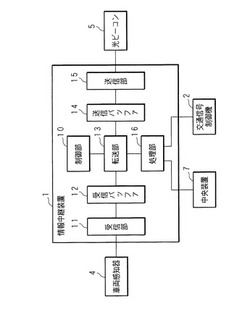
運転支援システム
【課題】支援対象地点の手前の道路形状にかかわらず、支援対象地点に対して適切な運転支援を行うことができる運転支援システムを提供する。
【解決手段】 運転支援システム1は、路側機2と送受信を行う送受信部4と、自車両の現在位置を検出する現在地測位部5と、ECU6と、ドライバに対して音声や映像によりサービス対象地点の状態案内を行うためのUI部7とを備えている。ECU6は、送受信部4が路側機2からのサービス対象地点に関する情報を受信すると、特異地点DB9に格納された情報からサービス対象地点の手前に現在位置自信度低下領域が存在するかどうかを判断し、サービス対象地点の手前に現在位置自信度低下領域が存在するときは、自車両が現在位置自信度低下領域に進入する前または自車両が現在位置自信度低下領域を通過した後にサービス対象地点の状態案内を行うようにUI部7を制御する。
(もっと読む)
信号機通過支援システムおよび信号機通過支援システム用の車載装置
【課題】燃料消費量の低減を図ることができるとともに、運転者に車速調整の煩わしさを感じさせることを抑制できる信号機通過支援システム、および、信号機通過支援システム用の車載装置を提供する。
【解決手段】車載装置側制御装置60は、車速V0を維持する場合に車両Cが信号機Sの所在地に到達するまでに必要となる第1必要時間Tc1を経過した時に、信号機Sが赤色信号灯11cを点灯していると判断すると、第1必要時間Tc1経過時において青色信号灯11aが点灯しているよう要求する第1許可色点灯要求信号RQ1を生成し、第1許可色点灯要求信号RQ1を信号機Sに送信する。信号機Sは、この第1許可色点灯要求信号RQ1を受信すると、第1必要時間Tc1経過時において青色信号灯11aが点灯するように信号灯11の制御を行う。
(もっと読む)
走行支援装置及び走行支援方法
【課題】狭部を通過するための最適な経路を運転者に認識させることができるようにする。
【解決手段】狭部通過のため、自車両が現在位置から現在の舵角を維持して進行したときの第1軌跡と、狭部位置の手前で自車両を停車させて舵角を変更する舵角変更ポイントと、自車両が前記舵角変更ポイントから当該舵角変更ポイントで変更した後の舵角を維持して進行したときの第2軌跡とを算出して、第1軌跡と舵角変更ポイントと第2軌跡とからなる狭部通過の経路情報を、自車両周囲の俯瞰画像などに重畳して支援画像としてモニタに表示する。
(もっと読む)
走行制御装置
【課題】退出路の手前で退出の意図が検出されても減速を開始せず、退出路の先頭位置を通過してから減速を行う走行制御装置を提供する。
【解決手段】走行制御装置1は、本線110から退出路120への退出意図を検出し、車両2が退出路120の先頭位置123を通過したか否かを判断し、退出意図が検出されかつ車両2が退出路120の先頭位置123を通過したと判断された場合に車速制御部50により減速制御を行わせる。
(もっと読む)
安全運転支援装置
【課題】安全運転支援システムのサービス開始点である路側装置の位置から自車両が走行した相対的な走行位置を正確に補正できる安全運転支援装置を提供する。
【解決手段】路側装置7から受信した走行支援情報9のデータ量、路側装置7との間の通信速度及び、情報処理部4への装置内のデータ転送速度に基づいて、路側装置7から走行支援情報9の受信を開始してからの通信時間、情報処理部4へ走行支援情報9の転送が完了するまでの転送時間及び走行支援情報9の解析を完了するまでの解析時間を求め、走行支援情報9の解析完了時点において自車両1Aが路側装置7の位置から走行した相対的な走行位置を算出するにあたり、通信時間、転送時間及び解析時間に自車両1Aが走行した距離を、記憶部5に記憶された履歴データから求めた所定の周期毎の走行距離を用いて補正する。
(もっと読む)
周囲形状検出装置、自律移動装置、移動体の操縦補助装置、周囲形状検出方法、自律移動装置の制御方法及び移動体の操縦補助方法
【課題】自律移動装置において、例えば草むらなどが存在する進路において、草むらなどの上面を走行可能な平面として検出してしまうことを防止する。
【解決手段】複数のカメラ3aL,3aRにより基準画像と参照画像とを含むステレオ画像を撮像する撮像手段と、撮像手段により得られるステレオ画像に基づいてこのステレオ画像中の平面領域を抽出するとともに抽出された平面領域以外の領域に対して物体検出処理を行い移動可能領域を検出する制御手段とを備え、第1の波長帯域の反射率と第2の波長帯域の反射率との比が所定値よりも高い点を植物の葉と判別し、撮像手段により撮像された像のうち、植物の葉であると判別された領域を除外し、残余の領域について、平面領域の抽出及び物体検出処理を行う。
(もっと読む)
運転操作評価装置
【課題】運転者による運転操作を車両の周囲の状況に応じて適正に評価する。
【解決手段】運転操作評価ECU1は、該車両の周囲に存在する他の車両、歩行者を含む移動体の該車両からの距離、及び、相対速度を検出する移動体検出部101と、検出された移動体の該車両からの距離、及び、相対速度に基づき、仮想的な優良運転者の運転操作を推定する優良操作推定部108と、該車両の運転者による運転操作を検出する運転操作検出部104と、優良操作推定部108によって推定された仮想的な優良運転者の運転操作に基づき、運転操作検出部104によって検出された運転操作の適否を評価する操作評価部110と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
警報装置
【課題】 運転者が望むタイミングに警報を行うことが可能な警報装置を提供する。
【解決手段】 ナビゲーション装置では、GPS装置を含む位置検出器が車両の現在位置を特定し、警報ポイントの警報位置情報を制御装置が備えるRAMが記憶し、車両の速度を速度センサ22が検出している。そして、現在位置、警報ポイントの警報位置、及び、車両の速度から、車両が警報位置に到達するまでの到達時間を算出し、この到達時間が、警報を行うタイミングとして設定された時間より小さくなったら車両が警報ポイントに近づいていることを警報している(S50)。そして、運転者の操作により、警報を行うタイミングを自由に設定できるようにしている。そのため、このナビゲーション装置を用いると、車両の速度に関係なく、運転者の好みに応じたタイミングで、車両が警報ポイントに近づいたことを警報することができる。
(もっと読む)
運転支援装置
【課題】自車両の無駄な加減速を防止することができる運転支援装置を提供する。
【解決手段】 運転支援装置は、自車両が加速した場合でも信号機を青信号で通過できないかどうかを判定し、自車両が加速した場合でも信号機を青信号で通過できないと判定されたときは、加速誘導支援を実施しない。一方、自車両が加速した場合に信号機を青信号で通過できると判定されたときは、信号機交差点周辺の道路環境から判断して自車両を減速させる必要があるために自車両を加速誘導できない状況であるかどうかを判定する。信号機交差点周辺の道路環境から判断して自車両を加速誘導できない状況であると判定されたときは、加速誘導支援を実施しない。一方、信号機交差点周辺の道路環境から判断して自車両を加速誘導できる状況であると判定されたときは、加速誘導支援を実施する。
(もっと読む)
ナビゲーション装置
【課題】メータ内に格納された表示装置の表示内容を見易くすることができるナビゲーション装置を提供する。
【解決手段】ナビ制御回路2は、通常時には車両情報を表示するためのメータ内に格納された表示装置9の第2領域に車両情報の一部(シフトポジション、走行距離など)を表示させ、経路案内時にあっては表示装置9の第2領域に経路案内情報(次の分岐点までの距離、分岐方向など)を表示させる。
(もっと読む)
路面表示認識装置、方法、プログラム及びコンピュータ読取可能な記憶媒体
【課題】反射して光った道路継ぎ目を停止線に誤認識することのない路面標示認識装置等を提供する。
【解決手段】停止線候補検出モジュール101が車載カメラ映像中から停止線の候補領域を検出するとともに、前記候補領域に対応する路面領域までの距離を推定し、停止線判定モジュール104が前記路面領域までの距離と車両速度とから得られる車輪の該路面領域通過時刻において、路面の凹凸による車両の振動を検出した場合は、前記停止線の候補領域は光った道路継ぎ目であり、停止線ではないと判断する。振動を検出しなければ、前記候補領域は真の停止線であったと判断する。
(もっと読む)
対人距離危険度警告装置
【課題】工事車両周囲に存在する作業員の位置安全を容易に認識できる装置を提供する。
【解決手段】信号を発信するための発信機と、信号を受信するための受信機との組み合わせよりなる装置において、受信機に受信信号処理部と警告発信部および警告表示部を設け、警告表示部において用いる表示パネルに、信号強度に応じて選択的に点灯する表示ランプを設けることにより、受信機と発信機の距離変化を認識できるよう構成したことを特徴とする。
(もっと読む)
移動端末、移動端末の制御方法、移動端末用コンピュータプログラム、および移動情報収集システム
【課題】収集後のデータ処理に要する時間を少なくすることが可能なデータを収集する移動端末等を提供する。
【解決手段】移動端末1の位置情報を検出する位置情報取得部11と、位置情報とその取得時刻情報とを関連させた通行情報を記憶する通行情報記憶部122と、通行情報記憶部122に記憶されている時間的に連続した通行情報に基づいて、予め定められた解析時間内に道路の同一区間を3回連続して通過した暫定すれ違い困難道路区間を特定する暫定すれ違い困難道路区間推定部121と、暫定すれ違い困難道路区間に関する通行情報の群71〜78を、無線通信を介して情報センターに送信する送信部141とを備える移動端末1である。
(もっと読む)
車両制御装置及び車両制御システム
【課題】運転者への煩わしさを低減し、適切な制御を行える車両制御装置及び車両制御システムを提供する。
【解決手段】 車両制御装置2は、複数の車線の停止線の位置情報を取得するインフラ情報受信部21、取得した複数の停止線の位置情報に基づいて自車両Mから停止線までの残距離の最大値と最小値との差分を算出する演算部29、最大値と最小値との差分を閾値と比較して一時停止の介入制御可否を判定する判定部30、介入制御の場合に停止目標位置を設定する停止目標位置設定部31を備える。停止目標位置設定部31は、停止目標位置を、残距離のうち最小値の停止線または残距離の車線での加重平均値に設定する。
(もっと読む)
ナビゲーション装置における逆走検出方法
【課題】新たに専用の逆走検出データを整備することなく、既存の地図データベースの範囲内で逆走検出を実現する。
【解決手段】地図データ入力部1から入力された地図データベースに基づいて、表示装置6に描かれた道路上に、位置検出器8、9、10、及び11で検出され制御回路4のマップマッチング処理にて演算された自車の位置を表示するナビゲーション装置において、自車位置と周辺リンクの重なり判定をステップS32で行い、重ならない場合は、マップマッチング処理を終了し、重なる場合は、直ちにリンク上に前記自車の位置を合わせこむマップマッチング処理を行ってから、このリンクの情報を活用し、該リンクの向きと自車の走行方向との一致不一致を判定する。そして、不一致の場合は、逆走と決定する。
(もっと読む)
車両運転支援装置
【課題】自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全な運転を支援することができる「車両運転支援装置」を提供すること。
【解決手段】物体検出手段17によって車載カメラ5の撮影映像から強風注意喚起用物体19を検出し、検出された強風注意喚起用物体19の外観に基づいて強風注意要否判定手段20による強風への注意の要否の判定を行い、この判定の結果、注意が必要である場合には、強風注意警告出力手段22によって強風への注意を促す警告を行うこと。
(もっと読む)
運転支援装置
【課題】ドライバーが入力装置を操作している場合に、ドライバーに煩雑感を与えることなく、信号機の指示の変化を報知することができる運転支援装置を提供すること。
【解決手段】運転支援装置は、停車中に車両前方の信号機の指示が発進不許可から発進許可に変化したことを検知する検知手段11と、ドライバーが入力装置40を操作中か否かを監視する監視手段13と、検知手段11及び監視手段13の結果に基づいてドライバーが信号機の発進許可の指示を認識可能な状態にあるか否かを判定する判定手段14と、を備える。運転支援装置は、判別手段12により第1所定時間Ta(例えば、Ta=1秒)内に車両が発進していないと判別され、且つ、判定手段14により認識可能な状態にないと判定された場合、信号機の指示が変化したことをドライバーに報知する。
(もっと読む)
41 - 60 / 261
[ Back to top ]