
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
81 - 100 / 867
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム
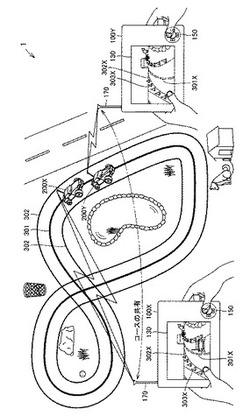
【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
自律走行体

【課題】不整地・未舗装路においても高速移動可能な経路を作成し、また、舗装路においても道路形状及び自律走行体の運動特性を考慮した走行経路を作成して高速走行ができるようにする。
【解決手段】本発明は、測距部31により走行領域内の測距データを取得する測距データ取得手段30aと、その測距データに基づいて、局所地図を作成する局所地図作成手段30bと、その局所地図に基づいて、自己位置から続く走行可能エリアを抽出し、走行可能エリア地図を生成する走行可能エリア地図作成手段30cと、走行可能エリア地図に基づいて、道なり方向を設定する道なり方向設定手段30fと、設定された道なり方向に基づいて、走行経路を生成する走行経路生成手段30gと、自己位置、及び方位データを取得する自己位置データ取得手段30hと、生成した走行経路及び自己位置データに従って、走行機構を介して走行させる自律走行手段10aとを有する。
(もっと読む)
コントローラ、模型装置、およびコントロール方法
【課題】模型装置がユーザの意図しないエリア内へと移動してしまう可能性を低減する。
【解決手段】コントローラ100は、模型装置から模型装置の現在位置を受信するための通信インターフェイス170と、模型装置の移動許可エリアの指定を受け付けるための入力部132,150と、模型装置を移動させるための命令を受け付けて、模型装置の位置に基づいて命令によって模型装置が移動許可エリアから出るか否かを判断し、模型装置が移動許可エリアから出ない場合に通信インターフェイスを介して命令を模型装置に送信し、模型装置が移動許可エリアから出る場合に模型装置に命令を送信しないプロセッサ110とを備える。
(もっと読む)
同時の位置決定およびマップ作成方法
【課題】自走式床集塵装置を自動位置決めするための演算負荷が少なくてすむ同時の位置決定およびマップ作成方法を提供する。
【解決手段】装置1が送/受光ユニットからなる障害物検出装置を備え、さらに占有された予め計算された装置の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置1対応した走行後の次に占有される第2の位置に関し、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル6の1つが装置1の新たな位置として占有される同時の位置決定およびマップ作成方法である。さらに改善するために前記パーティクル6の計算が装置1の所定の走行方向rおよび走行距離ないしは走行速度により決定される立体角αおよび間隔範囲aに関して制限される。
(もっと読む)
ロボットの自己位置推定方法
【課題】ロボットが、自己推定の精度が悪い状況に陥ることを防ぐことを目的とする。
【解決手段】本発明に係るロボットの自己位置推定方法は、ロボットが移動する空間の地図データを取得し、シミュレーションにより、地図データの領域毎にロボットの自己位置推定の容易性を示す自己位置推定容易性パラメータを算出し、自己位置推定容易性パラメータに関する情報をロボットの自律走行の前にユーザに提示する第1の処理と、自己位置推定容易性パラメータに基づいてロボットに自己の位置を推定させる第2の処理のうち少なくとも一方の処理を実行する。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
個人の相互交流のためのコンパニオンロボット
【課題】ロボットを人間と相互交流できるようにする。
【解決手段】人間の居住者と相互交流するための来客としての移動ロボット10は、居住者との相互交流に先立ち、部屋を縦横に捜索手順を実行し、目的の居住者が在宅しているか口頭で尋ねることがある。居住者を発見した時点で、移動ロボットは、遠隔地第三者とのテレビ会議セッションを実施する、または種々の方法で居住者と相互交流することができる。例えば、ロボットは、居住者と会話をし、薬剤または他のスケジュールの遵守を促進する。さらに、ロボットは、居住者との衝突を回避するための安全機能を組み込み、またロボットは、危険な障害にならないように、その存在を聞こえるように知らせる、および/または目に見えるように示すことができる。さらに、あらゆるセンサの記録および転送が居住者に承認されるように、移動ロボットは、組み込まれたプライバシーポリシーに従い行動する。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
移動車両の制御システム
【課題】移動車両を下り段差へ近づけすぎることなく、危険領域で安全に進行方向を切り替えることのできる移動車両の制御システムを提供することを目的とする。
【解決手段】上記課題を解決するための本発明の移動車両の制御システムは、外部環境情報を検出する外部環境センサと受光した光より識別番号を検出する識別番号検出部とを有する移動車両と、前記識別番号を含む光を下り段差に照光する照光部と、前記外部環境情報を用いて前記移動車両の周囲の下り段差が位置する方向を算出する方向算出部と、前記移動車両の移動を制御すると共に、前記識別番号検出部で検出された識別番号が所定の番号である場合に前記方向算出部で算出された下り段差の存在する方向を進行禁止範囲として設定する制御部と、を備えたことを特徴とする。
(もっと読む)
倒立型移動体及びその制御方法
【課題】特別なセンサを用いずに搭乗者の姿勢を推定可能とし、良好な制御を実現可能とする。
【解決手段】倒立型移動体201は、車輪106と、プラットフォーム101と、プラットフォーム101の鉛直方向に対する傾斜角と、車輪106の回転角度と、車輪106の回転駆動トルク指令と、車輪106の質量と、車輪106の半径と、車輪106の回転軸に関する慣性モーメントと、搭乗者202の質量と、プラットフォーム101と搭乗者102の重心との間の距離と、に基づいて、搭乗者102の鉛直方向に対する搭乗者姿勢を搭乗者姿勢推定値として推定する搭乗者姿勢推定器108と、プラットフォーム101の鉛直方向に対する傾斜角と、搭乗者姿勢推定器108で推定した搭乗者姿勢推定値と、車輪106の回転角度と、に基づいて、車輪106の回転駆動を制御する制御器103と、を備える。
(もっと読む)
移動装置およびロボットならびにこれらの制御システム
【課題】制御対象の状況に鑑みて、時空間座標系における当該制御対象の目標軌道を適当な形態で探索することができるシステム等を提供する。
【解決手段】時空間座標系における第1基準点q1(k)および第2基準点q2(k)の初期位置関係(k=1)が、アクチュエータ2の動作性能に応じた「第1条件」を満足するように設定される。前回軌道候補tr(k−1)が物体軌道troに接触すると判定された場合、時空間座標系における第1基準点q1(k)および第2基準点q2(k)の今回位置関係(k>1)が第1基準点q1(k)および第2基準点q2(k)の今回時間間隔が前回時間間隔よりも長くなる等の「第2条件」を満足するように設定される。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
小型自律カバレッジロボット
【課題】筐体が長方形の前方部と半円形の後方部とを有し、清掃機構が壁の隅部または壁のへりに及ぶことによって、その長方形の部分が壁の隅部または壁のへりに接するように動くことができる自走式カバレッジロボットを提供する。
【解決手段】衝突に応じて、進行方向および進行方向と直角にまじわる方向に移動可能であるバンパーと、バンパー内に配置される近接センサと、バンパーの移動を検出する複数の衝突センサと、差動駆動される右および左駆動車輪を備える駆動システムと、駆動軸に平行な横軸に沿って配置されるフリーホイールと、ローラブラシを備える清掃アセンブリと、を備え、バンパーは、清掃アセンブリの3つの側面の周囲に配置され、清掃アセンブリは、フリーホイールの前方において、清掃面上で片持ち構造で保持され、近接センサと多方向衝突センサは、ロボットが駆動軸周りに回転する際に、筐体の側面に平行な壁を検出する構成とした。
(もっと読む)
走行制御システム
【課題】移動体の制御を安価にすることができ目標位置まで自動で移動することを目的とする。
【解決手段】移動体100に備えられ信号光を投光及び検知可能な投光機20と、投光機20が投光する信号光と同じ方向へ超音波を送信すると共に送信した超音波を検知する2つの超音波センサ30と、移動体100の目標位置200に備えられ投光機20の投光する信号光を反射する反射板50から構成する走行制御システム10であって、移動体100は、投光機20で移動体100の進行方向を検知した後、2つの超音波センサ30で移動体100の目標位置200に対する移動体100の傾きを補正しながら目標位置200まで移動することを特徴とする走行制御システム10。
(もっと読む)
車両
【課題】車両を移動することなく、起立、傾斜(乗降停止)を行う。
【解決手段】傾斜状態で乗降停止している状態から起立したり、傾斜させて停止する場合、起立や傾斜のためのトルクを車体に作用させると、反作用で車輪が回転して車両が前後に移動してしまう。そこで、搭乗部を前後に移動させることにより、車両本体が傾いた状態でも、その重心が駆動輪接地点を通る鉛直線上にある状態をつくり、その重心が移動しないように、車体傾斜角と搭乗部位置を制御することで、車両を移動させることなく(車輪を回転させることなく)起立、傾斜を実現する。
(もっと読む)
環境地図生成方法
【課題】自己位置推定誤差が生じる場合であっても、移動体と障害物との接触を回避可能な環境地図生成方法を提供すること。
【解決手段】本発明にかかる環境地図生成方法は、環境地図を格納するメモリ12と、周囲の環境情報を取得するセンサ11と、を備え、環境地図に基づいて自律移動する移動体1の環境地図生成方法である。まず、実環境に基づいて環境地図を生成する。次に、環境地図における狭路部の地図情報を削除する。そして、移動体1が狭路部を自律移動する場合、センサ11により取得した当該狭路部の環境情報に基づいて、環境地図における当該狭路部の地図情報を生成する。
(もっと読む)
電動車両及びその制御方法
【課題】安全に障害物を回避することが可能な電動車両を提供することを目的とする。
【解決手段】電動車椅子11は、車体部12と、操作者の操作を検出する操作部13と、車体部12の周辺にある障害物を検出する障害物センサ14と、車体部12から操作方向に生成される領域をサーチ領域21として、サーチ領域21内に存在する障害物を、回避すべき障害物と判断する障害物判断部15と、障害物判断部で判断された障害物から離れるための仮想斥力を算出する仮想斥力算出部16と、操作力及び仮想斥力の合力を算出する合力算出部17と、合力の方向へ移動するように制御する制御部18とを備える構成である。
(もっと読む)
位置推定方法、位置推定装置及びプログラム
【課題】位置推定方法、位置推定装置及びプログラムにおいて、環境変化に関する事前の予測、或いは、事前の知識に依存せずに自己位置推定の精度を向上することを目的とする。
【解決手段】コンピュータによる位置推定方法において、電子装置の移動履歴を取得して記憶部に一時的に格納する移動履歴取得工程と、前記移動履歴と、外的センサの観測情報と、電子装置が導入される環境の静的地図のデータと、電子装置の移動中に実時間で作成された非静的地図のデータに基づいて、電子装置の自己位置とその周囲の周辺地図を推定する推定工程を含むように構成する。
(もっと読む)
81 - 100 / 867
[ Back to top ]