
Fターム[5H505AA30]の内容
交流電動機の制御一般 (51,584) | 用途 (3,022) | その他 (132)
Fターム[5H505AA30]に分類される特許
1 - 20 / 132
モータ制御装置
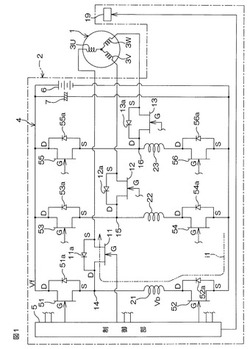
【課題】スイッチング損失およびサージ電圧を抑制しつつ、小型化、および製造コストの低減化を達成することのできるモータ制御装置を提供する。
【解決手段】第1のFET51と第2のFET52との接続点14が、第1のリレー11を介して電動モータ1のU相界磁巻線3Uに接続されている。接続点14と第2のFET52との間に第1のインダクタ21が接続されている。制御部5は、第1のリレー11に回生電流i1が流れているときに、第1のリレー11をターンオフする。これにより、第1のインダクタ21に、回生電流i1の変化を妨げる方向に誘起電圧Vbが生じる。この結果、第1のFET51のソース電位が高くなるので、第1のFET51に端子間電圧が低減される。第1のFET51に端子間電圧が低減した状態で、第1のFET51がターンオンされる。
(もっと読む)
排熱回収装置

【課題】タービンで発電した電力でコンプレッサを駆動して排熱回収することができ、コンプレッサの制御が容易であり、かつ排熱を回収するために複数のタービンを必要とする場合への適用が容易である排熱回収装置を提供する。
【解決手段】直流バス5の直流電圧を検出する電圧検出器12と、直流電圧に基づいて算出されたコンプレッサ8A,8Bの回転速度指令値16A,16Bをインバータ6A,6Bに出力する回転速度指令器13とを備える。
(もっと読む)
鞍乗型車両
【課題】インバータの大型化を抑えつつインバータの故障を防止できかつモータの巻線を円滑に切り替えることができる、乗り心地の良い鞍乗型車両を提供する。
【解決手段】自動二輪車10は、切り替え可能な巻線を有するモータ18と、アクセルグリップ22と、アクセルグリップ22からの指示に基づいて制御信号を出力する制御部20と、制御部20からの制御信号に基づいてモータ18に出力電圧を供給するインバータ14と、巻線を切り替えるスイッチ16a〜16cと、モータ電流を検出する電流センサ24a,24bと、モータ18の位相を検出するエンコーダ26とを備える。制御部20は、巻線の切り替え条件が成立したとき、アクセルグリップ22からの指示に係わらずモータ電流が0になるように、モータ電流とモータ18の位相とに基づいてインバータ14のデューティー比を調整する。デューティー比調整期間中に巻線を切り替える。
(もっと読む)
動力伝達装置及び動力伝達方法
【課題】動力伝達の途中で生成され外部出力される直流の電圧を略一定にする電圧調整機能を備えた動力伝達装置を提供する。
【解決手段】本発明の動力伝達装置1は、駆動回転軸2に設けられて当該駆動回転軸2の回転で交流を発生する起電手段4と、起電手段4で発生した交流を一旦直流に整流した後に周波数変換して出力するインバータ6と、インバータ6からの交流が入力されて従動回転軸3に回転駆動力を発生させるモータ手段5と、を有する動力伝達装置1において、インバータ6内の直流を外部に出力可能なDC供給部と、インバータ6内の直流電圧を測定する電圧測定部8と、電圧測定部8の測定値が一定となるように、インバータ6での変換周波数を可変とする周波数調整部10と、を備えている。
(もっと読む)
駆動制御装置、電気機器及び駆動制御方法
【課題】負荷特性に応じて電機機器の回転数を制御することができる駆動制御装置、電気機器及び駆動制御方法を提供する。
【解決手段】モータ20の出力に関する物理量を検出する物理量検出部71、モータ20の回転数が基底回転数以上であるか否かを判定する回転数判定部72、回転数判定部72での判定結果に応じて物理量に対する閾値を選択する閾値選択部73、検出した物理量及び選択した閾値の大小関係に応じて回転軸の回転数を制御する回転数制御部74などを備える。
(もっと読む)
電動船外機
【課題】電動船外機の操作性の向上を図るとともに船舶のスペースを圧迫しない電動船外機を提供する。
【解決手段】直流電流を交流電流に変換するインバータ3およびインバータ3が変換した交流電流によって駆動する駆動用電動機2を有する船外機本体11と、インバータ3に直流電流を供給する電池部122および船外機1を制御する制御部121を有し船外機本体11とは別体に構成される制御/電源ユニット12と、電池部122とインバータ3とを直流電流を供給可能に接続する第一主電力線711および船外機本体11と制御部121とを信号を送受信可能に接続する第一信号線715と含む接続ケーブル710とを備え、インバータ3が変換した交流電流を駆動用電動機2に供給するための第二主電力線712が船外機本体11の後側に配策され、第一信号線715が船外機本体11の前側に配策される。
(もっと読む)
織機における運転制御装置及び運転制御方法
【課題】起動時の筬打ち不足を解消し、かつ織機の目標回転速度の下限を下げる。
【解決手段】デルタ用電磁接触器25及びスター用電磁接触器26は、織機制御コンピュータCoのON−OFF制御を受ける。織機駆動モータMは、インバータ28を介して商用電源27に電気的に接続されている。インバータ28は、織機制御コンピュータCoの指令制御を受け、織機制御コンピュータCoは、インバータ28の出力電圧や出力周波数を指令制御する。織機制御コンピュータCoは、起動時にインバータ28とデルタ結線回路とを用いて織機駆動モータMを起動する起動運転制御機能と、定常運転時にインバータ28とスター結線回路とを用いて織機駆動モータMを駆動する定常運転制御機能とを有する。
(もっと読む)
電動機制御システム
【課題】本発明は、周波数電圧変換部で異常が発生したとしても、電動機の回転を確保することができる電動機制御システムを提供する。
【解決手段】本発明に係る電動機制御システム200は、回転動作を行う電動機7と、電動機7に電力を供給する電力供給源部1,3と、電力供給源部1,3から出力された電力に対して、周波数および電圧の変換を行う周波数電圧変換部5とを備えている。さらに、電動機制御システム200は、周波数電圧変換部5に異常が生じたときに、電力供給源部1,3から出力される電力を、周波数電圧変換部5を介さず、電動機7に供給するバイパス回路6と、周波数電圧変換部5に異常が生じたときに、電力供給源部1,3から出力される電力の電圧および周波数を、可変に制御する電圧周波数可変制御を行う制御部12,2,4とを、備えている。
(もっと読む)
船舶用電気推進装置
【課題】蓄電池設備の容量(設置スペースおよび重量)を大きくせずに、船舶航行中の電池切れを防止するようにした電気推進装置を提供する。
【解決手段】陸上電源8から船舶内の蓄電池3を充電し、その電力によって推進用電動機2を駆動する船舶用電気推進装置において、船舶の目的地までの距離S1、速度の計画値v1、推進用電動機の消費電力計画値P1からなる第1群のデータまたは、GPS28、電力検出器32で実測された距離S2、速度v2、推進用電動機2の消費電力P2からなる第2群のデータのいずれかと蓄電池の電池残量A1とから、目的地まで到達可能な推進電動機の消費電力上限値を求め、電力上限値を推進用電動機2に印加された電圧で除算してトルク分電流上限値IqLIMを求め、推進力指示器によって設定される推進用電動機のトルク分電流指令値Iq*がトルク分電流上限値IqLIMを超えないように制限して推進用電動機2を駆動する。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
船舶用インバータシステム
【課題】特殊な変圧器を用いることなく励磁突入電流を低減し、もって船内に設置する発電機の容量や台数を最適化し、船内省スペース化を可能にする。
【解決手段】船内母線に接続された複数個のインバータによって周波数変換された電圧を、推進用電動機に巻装された複数個の固定子巻線に供給するようにした船舶用インバータシステムにおいて、推進用電動機の固定子巻線およびインバータを2つのグループに分け、推進用電動機の第1グループのそれぞれの固定子巻線と、第1グループのそれぞれのインバータの負荷側を接続し、第1グループのインバータの電源側を、共通の交流リアクトルを介して前記船内母線に接続し、推進用電動機の第2グループのそれぞれの固定子巻線と、第2グループのそれぞれのインバータの負荷側を接続し、第2のグループのインバータの電源側を、一次側と二次側とで電圧位相が30度ずれた共通の三相単巻変圧器を介して前記船内母線に接続した。
(もっと読む)
電動作業車両の出力制御装置
【課題】所定の作業回数の動作を確実に実行可能な電動作業車両の出力制御装置を提供する。
【解決手段】車載バッテリ220から電源供給される電動アクチュエータ210によって駆動され周期的な作業を実行する作業装置1が搭載された電動作業車両において電動アクチュエータの出力を制御する出力制御装置240を、車載バッテリの現在の残存電力量を検出する残存電力量検出手段と、予め設定された総作業サイクル数に達するまでの予定サイクル数を算出する予定サイクル数算出手段と、残存電力量及び予定サイクル数に応じて電動アクチュエータに供給される電力を制限する電力制限手段とを備える構成とする。
(もっと読む)
船舶用ハイブリッド式推進システム
【課題】船舶の通常航行時に外乱によって電気推進プロペラを駆動する推進装置用電動機の実回転速度が目標回転速度よりも高くなった場合でも、不要な回生制動の発生を防ぐ船舶用ハイブリッド式推進システムを提供する。
【解決手段】インバータ制御回路6Cに回転速度指令nsと実回転速度NRとの速度偏差の極性がプラスのとき推進装置用電動機7に力行動作を行わせ、速度偏差がマイナスのとき推進装置用電動機に回生動作を行わせるようにした船舶用ハイブリッド式推進システムにおいて、回転速度設定器10が推進装置用電動機に減速度または逆転操作の指令を出力しているときは、予め定めた回生トルク制限値となるゲート信号をインバータ主回路のスイッチング素子に出力し、回転速度設定器10が推進装置用電動機に増速度または一定速度の指令を出力しているときは、回生トルクがゼロとなるゲート信号をインバータ主回路6Pのスイッチング素子に出力する。
(もっと読む)
交流電動機の制御装置
【課題】変換器のサイリスタが失弧しても、トルク脈動を発生させることなく装置を停止させることが可能な交流電動機の制御装置を提供する。
【解決手段】第1の変換器1と、第2の変換器2と、位置検出手段4と、速度検出手段5と、電流検出手段6と、速度検出手段5の速度帰還が速度指令となるように制御して電流指令を出力する速度制御器72と、電流検出手段6の電流帰還が電流指令となるように第1の変換器1の制御角指令αを出力する電流制御器73と、位置検出手段4の検出位相に応じて第2の変換器2の位相を制御する位相制御器79と、失弧検出手段9とで構成する。失弧検出手段9は、αが第1の所定値以下となり、且つ、電流指令から電流帰還を減算した偏差に第1の定数を乗じて遅延手段によって遅延させた信号から、電流指令に第2の定数を乗じた値を減算した値が第2の所定値以上となったとき、失弧発生とみなす。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI制御量を演算するためのPI制御手段50,51と、モータの非干渉化制御のための非干渉化制御量を所定のタイミングで演算するための非干渉化制御量演算手段52と、PI制御手段50,51により演算されたPI制御量と非干渉化制御量演算手段52により演算された非干渉化制御量とから補正後の非干渉化制御量を決定する補正演算手段53,54と、PI制御手段50,51によって演算されたPI制御量と補正演算手段53,54によって補正された補正後の非干渉化制御量とを加算する加算手段55,56と、を備え、加算手段55,56は、所定の条件をみたす場合は、非干渉化制御量演算手段52によって演算された前回値の非干渉化制御量を補正後の非干渉化制御量として加算する。
(もっと読む)
電気推進システム
【課題】船舶に搭載した蓄電池で推進用電動機を駆動するインバータを効率よく利用する。
【解決手段】船舶に蓄電池8Aを設置してインバータ7Aにより推進用電動機1を駆動するインバータ装置17Aにおいて、停泊時に陸上電源24からの交流を船内母線20を通してインバータの出力側7Eに導入し順変換して蓄電池8Aを充電する。航行中に蓄電池8AのSOCが基準値以下に低下した場合はディーゼル発電機21の出力をダイオードコンバータ6Aよりインバータ7Aに直接供給する。
(もっと読む)
電力変換装置
【課題】電流コラプス現象が発生する半導体デバイスを用いた場合にも、電力変換装置において、より正確にオン電圧補償ができるようにする。
【解決手段】電力変換装置において、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)の非導通時に印加される印加電圧値(V)に対応した、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のオン電圧降下(Vs)を求める電圧降下演算部(52)を設ける。また、オン電圧降下(Vs)に応じ、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)をオン状態にする時間(Ton)を制御する制御部(5)を設ける。
(もっと読む)
低インダクタンス高効率のインダクションマシン及びその製作方法
【課題】低インダクタンスで高効率のインダクションマシンを設計するための方法及びシステムを提供すること。
【解決手段】電気駆動システムは、インダクションマシン(60)と、該インダクションマシン(60)に電気的に結合されたインダクションマシン(60)を駆動するためのパワー変換器(58)と、を含む。パワー変換器(58)は複数の炭化ケイ素(Sic)切替えデバイス(72〜82)を備える。本電気駆動システムはさらに、パワー変換器(58)に電気的に結合されると共に、ピーク対ピーク電流リップルが概ね5パーセント未満となるように複数のSic切替えデバイス(72〜82)に対して所与の切替え周波数で切替え信号を送るようにプログラムされた制御器(114)を含む。
(もっと読む)
単相モータの逆回転防止方法及び単相モータ制御回路
【課題】過剰な負荷を与えられたときに、逆回転し暴走することを防止できる単相モータの逆回転防止方法の提供。
【解決手段】始動用の補助巻線を備える分相始動型、又は始動用の始動コンデンサを備えるコンデンサ始動コンデンサ誘導型である補助巻線を備える単相モータの逆回転を防止する方法。電源投入(S1)後、始動用の補助巻線(分相始動型)又は始動コンデンサ(コンデンサ始動コンデンサ誘導型)に所定時間通電した(S5)後、補助巻線に生じる誘起電圧を検出し、検出した誘起電圧が所定電圧を下回るか否かを判定し(S13)、誘起電圧が所定電圧を下回ると判定した(S13)ときに、単相モータに過電流が流れているか否かの判定(S19)に要する時間以上、始動用の補助巻線(分相始動型)又は始動コンデンサ(コンデンサ始動コンデンサ誘導型)に通電する(S17)。
(もっと読む)
情報処理装置、これを用いたモータ駆動装置、及び、情報処理方法
【課題】 上下アームのスイッチング素子を駆動するとともに、上下アームの異常を検出して異常信号を出力するゲート駆動回路を備える情報処理装置において、異常信号の通知機能が正常であるか否かを判定する。
【解決手段】 情報処理装置(ECU)において、ブートストラップ式のゲート駆動回路は、ゲート駆動の開始前に、通常駆動時ならば先に下アーム駆動信号を出力すべきところ先に上アーム駆動信号D1を出力し(S10)、ダミー異常信号Edを意図的に発生させる(S20)。ここで異常信号通知機能が正常であれば、ダミー異常信号Edは、異常信号出力部から出力され、異常信号線を経由して伝達され、異常信号受信部に受信される。そこで、異常信号受信部がダミー異常信号Edを受信したか否かを確認することで、異常信号通知機能が正常であるか否かを判定する(S30)ことができる。
(もっと読む)
1 - 20 / 132
[ Back to top ]