
Fターム[5H540BB04]の内容
Fターム[5H540BB04]に分類される特許
1 - 20 / 37
リニアモータ制御装置、及び制御方法
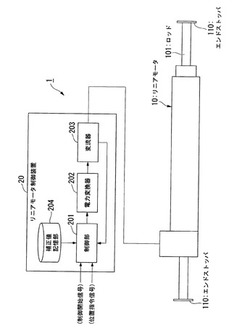
【課題】可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減する。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
(もっと読む)
リニアモータの可動子

【課題】組となるセンサ列の増加の如何にかかわらず、外周フレーム5の円周面のどの位置に配列したとしても、直径の対向間隔をもって一定に維持された状態で、そのセンサ面をコイルブロック3a中心に向けて取着でき、磁気センサ6の検知電圧の大小出力値の平均化により、シャフト2に軸芯ズレが生じても可動子3が中心に位置するものと擬制して位置検出できるようにする。
【解決手段】筒状ユニット3bに設けられたプリント基板35の円周面に、センサ用の端子部35eを、コイルブロック3aの中心を挟んで対向する線上の一方と他方のそれぞれに、電気角180゜のピッチ幅をもって一列状に複数配設し、かつ、他方の列側を一方の列側に対して電気角90゜をもって位置ズレさせて配置させて、対向取着される磁気センサ6によって、二相信号の検出を行うよう構成する。
(もっと読む)
洗濯機の制振装置
【課題】洗濯槽重量のアンバランスに応じた最適な制振制御を、リニアモータのベクトル
制御を用いることでリアルタイムに行うことができる制振装置を提供する。
【解決手段】洗濯槽と筐体の間に配置されたリニアモータおよび弾性体と、前記リニアモ
ータの巻線に通電される電流を検出し、電流信号を出力する電流検出手段と、前記リニア
モータの可動子の相対位置を検出して前記可動子の移動距離を演算する位置演算部と、前
記洗濯槽または前記筐体の加速度を検出し、加速度信号を出力する加速度センサと、前記
移動距離、前記加速度信号および前記弾性体の弾性定数に基づき、加振力信号を演算する
加振力演算部と、前記加振力信号と目標振動値との差分に基づき、指令q軸電流値を出力
するトルク制御部と、前記電流信号と、前記指令q軸電流値に基づいて、前記巻線に対す
る通電を制御する通電制御手段とを有することを特徴としている。
(もっと読む)
直線・回転複合アクチュエータシステム
【課題】クローズドループ制御で移動子軸の回転角度を制御できる直線・回転複合アクチュエータシステムを提供する。
【解決手段】直線・回転複合アクチュエータシステムは、軸線方向に直線運動でき、かつ軸線の回りを回転運動できる軸部材82と、軸部材82を囲む中空の回転子88と、回転子88を収容する空間が形成されると共に、回転子88を軸線の回りを回転させる回転モータの固定子92と、回転子88と一緒に回転して回転モータの回転子88の回転を軸部材82に伝えると共に、軸部材82が直線運動するのを許容する直動軸受86,87と、回転子88の回転角度を測定する角度測定装置94と、角度測定装置94が測定した回転モータの回転子88の回転角度が指令値に一致するように、回転モータを制御する回転モータ用ドライバと、を備える。回転モータの回転子88の回転角度を制御することによって、軸部材82の回転角度を制御する。
(もっと読む)
リニア同期モータ
【課題】 固定子の製造コストを低減して、磁気損失の少ないリニア同期モータを提供する。
【解決手段】 一方の端部磁極部33の第1の一対の被連結部分47と、エンドブラケット35の第1の一対の被連結部分51と、端部磁極部37の第1の一対の被連結部分55と、5個の磁極部39の第1の一対の被連結部分59とを一対の磁性筒体41によって接続する。一方の端部磁極部33の第2の一対の被連結部分と、端部磁極部37の第2の一対の被連結部分と、5個の磁極部39の第2の一対の被連結部分とを一対の導磁性成形品43により接続する。一対の磁性筒体41にリニア軸受65を介して一対のガイド軸9をスライド可能に嵌合する。一対の磁性筒体41及び一対の導磁性成形品43によりヨークを構成する。5個の磁極部39のそれぞれを、複数枚の磁性鋼板を軸線方向に積層して構成する。
(もっと読む)
リニアモータ
【課題】リニアモータを小型化することにある。
【解決手段】外周面にコイル組立体20が取り付けられるロッド11と、ロッド11を囲むように磁石組立体14が装着されるモータケース12とを有するリニアモータであって、円筒形状の2つの永久磁石15a,15bを相互に同極性の磁石端面を隣接させて磁石組立体14を形成し、それぞれ永久磁石15a,15bの半分の軸方向長さを有する8つのコイル21を相互にコイル端面を隣接させてコイル組立体20を形成する。コイル組立体20のうち1組以上のコイル21の隣接されたコイル端面の極性を同極性励磁して径方向集中磁束を生じることにより磁石組立体14の磁束を引き付け、コイル組立体20の軸方向先端側から軸方向基端側に向けて同極性励磁を移動励磁する。
(もっと読む)
直線型アクチュエータ
【課題】 推力を高めるとともに、コイルに通流する電流を切り替える際に生じる推力のリップルを抑制した直線型アクチュエータを提供する。
【解決手段】 直線方向にS極とN極が交互に配列された多極磁石11と、多極磁石11の長さ方向に相対移動可能で複数の単位コイルC1〜C6を長さ方向に配列したコイル体21と、多極磁石11に対するコイル体21の長さ方向の位置を検出する磁気センサ22と、磁気センサ22で検出したコイル体21の位置に基づいて各単位コイルC1〜C6に通流する電流を独立して制御する通電制御回路4を備える。コイル体21を構成する全ての単位コイルC1〜C6において推力を発生させて推力を高め、コイル体21に生じる推力の推力リップルを抑制して円滑な動作が可能になる。
(もっと読む)
揺動体装置、及びそれを用いた機器
【課題】揺動体の中立位置を調整して、それによる反射光ビームの照射位置の調整やそれと対象物間の距離の調整などを可能とした揺動体装置を提供することである。
【解決手段】揺動体装置は、中立位置を挟んで揺動軸2の回りに揺動可能に支持された揺動体1と、駆動手段4、5、6と、位置調整手段4、7、8とを有する。駆動手段は、揺動体1を揺動軸2の回りに揺動させるための手段であり、位置調整手段は、揺動体1の中立位置を調整するための手段である。
(もっと読む)
電磁アクチュエータの短絡検出装置
【課題】電磁アクチュエータの短絡を適切に検出することが可能な電磁アクチュエータの短絡検出装置を提供する。
【解決手段】電磁アクチュエータの短絡検出装置は、電磁アクチュエータの駆動回路から出力された電圧値及び電流値に基づいて、電磁アクチュエータの第1の抵抗値を求めると共に、電磁アクチュエータの温度を取得して、当該温度に基づいて電磁アクチュエータの第2の抵抗値を求める。そして、求められた第2の抵抗値が第1の抵抗値に所定値を加算した値よりも大きい場合に、電磁アクチュエータが短絡していると判断する。これにより、電磁アクチュエータの短絡を精度良く検出することが可能となる。
(もっと読む)
ブラシレス電気機械
【課題】制御回路の構成がより単純で効率の良いブラシレス電気機械を提供する。
【解決手段】第1の移動部材は永久磁石対(10pair)を少なくとも1つ含む磁石集合体(20)を備えており、第2の移動部材は電磁コイル(30)を含んでいる。制御回路は、電磁コイル(30)への電力の供給又は電磁コイル(30)からの電力の回生を制御する。永久磁石対(10pair)は、第1の極同士が互いに接する同極接触面(10c)上の磁場方向(MD)であって、永久磁石対の中央から外側に向かう磁場方向(MD)に沿って最も強い磁場を発生する。電磁コイル(30)は、磁場方向(MD)と交差する方向(CD)に電流が流れるように配置されている。
(もっと読む)
リニアモータの原点設定方法
【課題】再現性のよい安定したリニアモータの原点設定方法を提供する。
【解決手段】予め設定した所定の方向に可動子を移動させ、磁気特性急変位置検知部によって検知した磁気特性急変位置を原点設定基準位置とし、この原点設定基準位置から、磁気式リニアエンコーダの絶対位置の基準位置を設定する。
(もっと読む)
負荷の電流制御装置
【課題】電流検出抵抗の端子電圧から電流を検出して、ソレノイドへの通電を制御する電流制御装置において、電流検出値に基づき断線の有無を精度良く検出できるようにする。
【解決手段】既知の目標電流を与える一方で、実電流を計測し、端子電圧を電流に変換するゲインを学習する。その後、ソレノイドをオープンにした状態での端子電圧と前記ゲインとから断線時のオフセットを求めて記憶させる。そして、断線診断においては、前記ゲイン及び断線時のオフセットを用いて、端子電圧を電流に変換し、目標電流が所定以上でかつ電流が閾値以下であるときに、断線の発生を判定する。
(もっと読む)
揺動アクチュエータ装置およびレーザ加工装置
【課題】簡単な構成でマグネット温度を制御し、トルク定数の変動を抑制することができる揺動アクチュエータ装置及びこのような揺動アクチュエータ装置を使用したレーザ加工装置を提供すること。
【解決手段】回転軸12と回転軸12の回りに配置されたマグネット13とからなる回転子と、この回転子の周りに配置されコイル14と、コイル14に電流を供給する電流供給手段とを備える揺動アクチュエータ装置において、電流供給手段を回転子を回転させる電流に加えて高周波電流を供給できる電流供給手段35にすると共に、マグネット13の温度を測定ための温度検出手段を設け、温度検出手段の測定結果に基づいて電流供給手段35がコイル14に供給する電流に高周波電流を重畳することによりマグネット13の温度を制御する。
(もっと読む)
ソレノイドを制御する装置および方法
【課題】ソレノイド(22)の動作を制御するための装置(1、50)および方法(400、500、600)を提供する。
【解決手段】ソレノイド(22)の動作を制御するための装置(1、50)および方法(400、500、600)は、所定の状態に応答して活動化信号(14’)を受け取るように構成された制御回路(1、50)を含む。制御回路は、前記活動化信号に応答して、第1の所定の期間、ソレノイドに第1の付勢信号を供給し、第2の所定の期間、第1の付勢信号を切断する。制御回路はさらに、第3の所定の期間、ソレノイドに第2の付勢信号を供給する。
(もっと読む)
シャフト型リニアモータの位置決め装置
【課題】リニアスケールによる高精度な位置決めを行うものでありながら、その検出区間を限定して磁気スケールの設置範囲を小さくすることにより、コンパクト化が求められる分野でも利用することができるようになり、しかも、磁気スケールが設置されていない区間においても、可動子の位置検出を可能にする。
【解決手段】 可動子3の直線駆動範囲に部分的に設定された検出区間で位置検出を行う第一位置検出手段4Aと、直線駆動範囲全域で位置検出を行う第二位置検出手段4Bとを備え、第一位置検出手段4Aは、精密な位置検出が可能なリニアスケールで構成し、第二位置検出手段4Bは、可動子3に設けられる磁気センサSでシャフト2の磁束を検出することにより可動子3の位置検出を行うものとする。
(もっと読む)
清掃装置
【課題】 歯牙を最適な運動にて清掃、マッサージする機具。
【解決手段】 手指により把持する把持部に第一磁場発生手段を設け、その磁場発生手段の内部にさらに第2磁場発生手段を設け、その第二磁場発生手段の端または内部に切削、研磨、清掃、診断用などの先端子を設けることにより的確な切削、研磨、清掃が可能となる。またそれらの磁場発生手段の時間、空間変動を検出すればその位置がわかり目視不可能な位置の切削、研磨、清掃が可能となる。さらにまた、磁場や振動を組織に伝達すれば、血行循環改善となる。
(もっと読む)
シャフトモータおよびその制御システム
【課題】ベアリングにかかわるトラブルを生じることなく低摩擦、高精度であるシャフトモータおよびその制御システムを提供する。
【解決手段】筒状をなすコイル9の中心軸上に設けられたシャフト2を軸方向移動可能に支持する流体軸受け4を備え、流体軸受け4は、シャフト2の表面に対しラジアル方向に流体を噴射する複数個のノズル15を備えている構成とする。
(もっと読む)
モータ駆動回路
【課題】パルス信号の電圧レベルによらずPWM信号におけるHレベルとLレベルの比率に応じてモータを制御する。
【解決手段】モータ駆動回路は、入力されるパルス信号が一方の論理レベルの場合は所定の第1電圧を出力し、前記パルス信号が他方の論理レベルの場合は所定の第2電圧を出力する電圧変換回路と、前記電圧変換回路から出力される前記第1及び第2電圧に基づいて、モータコイルの駆動を制御する駆動制御回路と、を備える。
(もっと読む)
リニアモータとアクチュエータ
【課題】 推力の向上と位置決め精度の向上を図ることが可能なリニアモータとアクチュエータを提供すること。
【解決手段】 永久磁石と、一個又は複数個のコイルと、を具備してなるリニアモータにおいて、上記コイルに位相差「0°」又は位相差「180°」の電流を流すようにし同じ向きに推力が発生するようにしたものであり、それによって、全てのコイルが推力の発生に寄与することになるので推力の向上を図ることができる。
又、そのようなリニアモータを使用したアクチュエータ。
(もっと読む)
リニア圧縮機の制御装置
本発明は、リニア圧縮機に関し、特に冷力可変及び突入電流の防止を遂行するリニア圧縮機の制御装置に関する。
本発明のリニア圧縮機の制御装置は、リニア圧縮機に積層されたコイル捲線体と、上記コイル捲線体に直列に接続された第1キャパシターと、上記第1キャパシターと並列構造を有し、キャパシタースイッチを備えたキャパシタンス可変部と、上記キャパシタースイッチを制御して制御装置の全体キャパシタンスを可変することにより、上記リニア圧縮機の出力変化を生じさせる制御部と、からなる。  (もっと読む)
(もっと読む)
1 - 20 / 37
[ Back to top ]