
Fターム[5H572JJ17]の内容
Fターム[5H572JJ17]に分類される特許
1 - 20 / 141
電動車両の制御装置
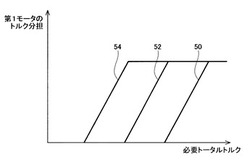
【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
サーボドライブシステム

【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、複数の回転電機の少なくとも1つにトルク変動が生じたときに、蓄電装置の入出力電力の変動を抑制することである。
【解決手段】回転電機制御システム10は、駆動用回転電機(MG2)12、発電用回転電機(MG1)14、MG2とMG1に共通の電源部16、MG2用の制御ブロック18、MG1用の制御ブロック19、MG2制御装置60、MG1制御装置62を含んで構成される。MG1制御装置62は、MG2のトルク変動を抑制するための変動抑制トルクのトルク位相を演算する変動抑制トルク位相演算部70と、変動抑制トルクのトルク振幅を演算する変動抑制トルク振幅演算部72と、演算された変動抑制トルクをMG1のトルク指令値に重畳し、これを変動抑制トルク指令値として演算する変動抑制トルク指令演算部74を含んで構成される。
(もっと読む)
電力変換装置
【課題】複数のインバータINVa,INVb,INVcのそれぞれを操作する変換用マイコン46a,46b,46cのそれぞれにECU30からの指令値情報を出力する場合、通信手段の数が増加し、ひいては装置の大型化やコストアップを招くおそれがあること。
【解決手段】ECU30は、インバータINVa,INVb,INVcのそれぞれに関する指令値を、外部通信線Lc1およびフォトカプラ42を介して通信用マイコン44に出力する。この際の通信プロトコルは、LINである。通信用マイコン44では、受信されたデータのフォーマットをI2Cに変更し、これを変換用マイコン46a,46b,46cに出力する。
(もっと読む)
負荷制御システムおよび負荷駆動システム
【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
シート搬送装置、画像形成装置、駆動制御プログラム及びシート搬送モータ制御システム
【課題】各回転体の回転を適切に制御し、3つ以上の互いに干渉し合う回転体の干渉を低減させることが可能とする。
【解決手段】第1の回転体と第2の回転体と第3の回転体とを有し、前記第1の回転体ないし第3の回転体のうち少なくとも何れか一つの回転体によりシート状媒体の搬送を行うシート搬送装置であって、前記第1の回転体を回転させる第1のモータの駆動を制御する第1制御要素を検出する第1検出手段と、前記第2の回転体を回転させる第2のモータの駆動を制御する第2制御要素を検出する第2検出手段と、前記第3の回転体を回転させる第3のモータの回転速度を制御するモータ制御手段と、前記第1制御要素と前記第2制御要素との和に基づき前記モータ制御手段に前記第3のモータの回転速度の変更を指示する速度制御手段と、を有する。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
モータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせ
【課題】2以上のモータが強制的に同期させられる場合において、各モータへの供給電流のアンバランスを抑制可能なモータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせを提供することである。
【解決手段】モータ制御システム1は、モータ内蔵ローラ2と、コントローラ(制御装置)6,7の組み合わせからなるものである。モータ内蔵ローラ2は、ローラ本体3とモータ4,5を有している。モータ4,5は、出力軸同士がローラ本体3で一体的に連結されており、モータ4,5は、強制的に同期運転するものである。モータ4,5の回転数に応じてコントローラ6,7から供給する電流パルスに下限が設定されている。
(もっと読む)
電動機制御装置及び電動機制御方法
【課題】複数の電動機を制御する場合における異常の予測または検知を好適に実行すること。
【解決手段】複数の電動機を統括制御する電動機制御方法であって、複数の制御器によって複数の電動機を個別に制御し、複数の制御器夫々による電動機の制御の電気的状態を検知し、複数の電気状態検知部によって夫々検知された電気的状態に基づいて前記複数の電動機夫々の特性を示す状態特性値に関する値を算出し、予め記憶された複数の電動機夫々の特性の初期状態を示す初期特性値に基づいて算出された状態特性に関する値に対応する比較対象値を算出し、比較対象値と状態特性値に関する値とを比較し、その比較結果に基づいて電動機夫々の劣化を判断し、複数の電動機に共通する条件に基づいて比較対象値の算出または比較対象値と状態特性値に関する値との比較を行うことを特徴とする。
(もっと読む)
モーター制御装置、搬送装置、画像形成装置
【課題】複数のモーター部を制御するために必要なポート数を減らし、CPU等の制御素子を選択するうえでの制約を軽くし、制御素子に要するコストを抑える。
【解決手段】モーター制御装置は、第1信号が入力される第1信号入力部と、第2信号を出力する第2信号出力部と、モーターと、を含む複数のモーター部と、第1信号を出力する出力ポートと、第2信号が入力される入力ポートを含むモーター制御部と、を含み、出力ポートは、複数のモーター部のうち先頭のモーター部の第1信号入力部に接続され、第2信号出力部は、次段のモーター部の第1信号入力部に接続され、第2信号を次段のモーター部の第1信号として入力し、先頭の次段以降のモーター部は、第2信号がモーターの回転が安定したことを示す状態であるとき、モーターを回転させる。
(もっと読む)
回転電機制御装置
【課題】複数のモータの過熱を防止しつつ所望の出力を確保する。
【解決手段】温度判定部25は、所定の保護温度に対する走行用モータ11および第1PDU14のモータ余裕温度ΔTmotと、所定の保護温度に対する発電用モータ13および第2PDU15の発電機余裕温度ΔTgenを算出する。主制御部27は、モータ損失最小電圧マップおよび発電機損失最小電圧マップを参照して、各モータ11,13の損失最小電圧であるモータ電圧Vmotおよび発電機電圧Vgenを算出する。熱平衡電圧算出部26は、各電圧Vmot,Vgenと、各余裕温度ΔTmot,ΔTgenとに基づき、各モータ11,13および各PDU14,15が熱平衡状態であるときの各PDU14,15の直流側電圧(DC/DCコンバータ16の2次側電圧)である熱平衡電圧Vtarを算出する。主制御部27は、熱平衡電圧Vtarを目標電圧Vとする。
(もっと読む)
制御装置、制御方法、及びプログラム
【課題】モータの高効率なトルク制御を可能にして、エネルギーの無駄を小さく抑えることの可能な制御装置を提供する。
【解決手段】制御装置4は、第1条件判断器16と、第2条件判断器17と、第1加算器20と、第2加算器21とを有する。第1,第2条件判断器16,17は、それぞれ、速度指令が示す角速度を条件として、第1,第2モータ5,6の出力トルクを設定するための第1,第2補正乗数を求める。第1加算器20は、前記角速度に第1補正乗数を乗じた値と、第1のトルク値とを加算することで第1モータ5の出力トルクを求めて、出力トルクを示す第1モータ5の駆動信号を出力する。第2加算器21は、前記角速度に第2補正乗数を乗じた値と、第1のトルク値と正負が反対である第2のトルク値とを加算することで、第2モータ6の出力トルクを求めて、該出力トルクを示す第2モータ6の駆動信号を出力する。
(もっと読む)
モータドライバ
【課題】エアコン室外機等の複数のモータを駆動する装置での部品点数を少なくすることを可能とし、入力端子が少ないモータドライバを提供する。
【解決手段】モータドライバ10は、モータ31,32を駆動する3相インバータ回路16,17を有するモータドライバであって、シリアル信号のモータ速度指令をパラレル信号のモータ速度指令に変換して各3相インバータ回路に出力するシリアルパラレル信号変換部23と、パラレル信号の状態信号をシリアル信号の状態信号に変換して出力するパラレルシリアル信号変換部26と、を備える。
(もっと読む)
回転電機制御装置
【課題】複数の交流回転電機のパルス幅変調のキャリアの波形を個別に変動させると共に、各キャリアと電流フィードバック制御の実行タイミングとを同期させ、且つ、所定の制御周期内で全ての交流回転電機の電流フィードバック制御を完了させる。
【解決手段】N個の交流回転電機の電流フィードバック制御は、重複することなく順次実行されて所定の制御周期TC内で完了される。各交流回転電機に対応するN個のキャリアCW1,CW2が、各基準区間TR1,TR2の長さを変動幅FRの範囲内でランダムに変動させて生成される。各キャリアCW1,CW2には、それぞれがN個の基準区間TR1,TR2を含むと共に、互いに開始タイミングが一致することがないように管理区間TM1,TM2が設定される。各キャリアCW1,CW2は、管理区間TM1,TM2のそれぞれの長さが制御周期TCに一致するように生成される。
(もっと読む)
遠心分離機
【課題】
遠心分離機において、交流電源の容量に対して複数のモータへの電力配分を設定する。
【解決手段】
双方向の昇圧コンバータ4からインバータ8を介して接続される遠心用モータ(ロータ駆動用モータ)9と、単方向の昇圧コンバータ5からインバータ12を介して接続されるロータ冷却用コンプレッサ用モータ13を交流電源22に並列に接続し、これらのコンバータ4、5の昇圧電圧を交流電圧22のピーク値以上とし、制御装置20はインバータ8、12を例えばPWM制御によりこれらのモータ9、13に適切な電圧が供給されるように制御する。この際、交流電源22の給電容量に合わせて遠心用モータ9とコンプレッサ用モータ13のロータ加速時の電力配分を設定する。この配分はあらかじめ設定して記憶しておき、これに従ってモータ9、13の回転を制御する。
(もっと読む)
送風装置及び電子機器
【課題】冷却能力を高めるために複数のファンを用いて筐体を冷却する送風装置において、ファンから発せられるノイズを抑制することができる送風装置及び電子機器を提供する。
【解決手段】送風装置は、第1のファン11と、第2のファン12とを含む複数のファンを具備し、前記第1のファン11、及び第2のファン12は互いに異なる複数のフィン13a,14aを有し、少なくとも、前記一方のファンのフィン数は素数であり、前記第1のファン11と第2のファン12とは異なる回転数で駆動する。
(もっと読む)
モータ制御装置
【課題】交流を直流に変換したのちさらに交流に変換してこれを駆動電力とするモータを、容易に制御できるモータ制御装置を実現する。
【解決手段】モータ51−1および51−2の駆動に関する指令をする数値制御部11と、交流を直流に変換する順変換部12と、数値制御部11による指令に基づき、順変換部12から出力された直流をモータ51−1および51−2の駆動のための交流に変換する逆変換部13−1および13−2と、を備えるモータ制御装置1において、逆変換部13−1および13−2は、数値制御部11および順変換部12と通信する第1の通信手段21を有し、順変換部12は、逆変換部13−1および13−2と通信する第2の通信手段22と、第1の通信手段21および第2の通信手段22を介して数値制御部11から転送された情報に基づいた順変換部12の動作設定に、順変換部12の動作を制御する順変換制御部23と、を有する。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
電動機駆動装置
【課題】リレーをオフする際に溶着などの不具合の発生を抑制する。
【解決手段】第2のバッテリ30の蓄電割合SOC2が閾値Sref未満のときには、モータMG1の逆起電圧Vm1が第1のバッテリ26の電圧と第2のバッテリ30の電圧のうち小さい方の参照電圧Vref以下となったときに第1のインバータ回路22をシャットダウンし、第1のインバータ回路22のシャットダウンとは独立にモータMG2の逆起電圧Vm2が参照電圧Vref以下となったときに第2のインバータ回路24とをシャットダウンし、第1のインバータ回路22と第2のインバータ回路24のいずれもがシャットダウンしているときに昇圧コンバータ28をシャットダウンし、その後に、第2のシステムメインリレーSMR2をオフとする。これにより、第2のシステムメインリレーSMR2に電流が流れていない状態で第2のシステムメインリレーSMR2をオフすることができる。
(もっと読む)
1 - 20 / 141
[ Back to top ]