
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
81 - 100 / 203
測位装置
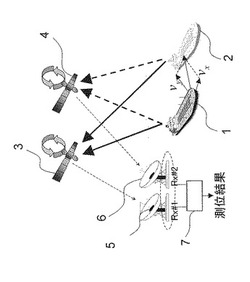
【課題】移動する電波源に対しても高精度の測位を可能にする測位装置を提供する。
【解決手段】2機以上の衛星3,4を経由して複数の受信局5,6で受信される未知の電波源1,2からの信号間のTDOAとFDOAを用いて前記電波源の位置を推定する測位装置であって、測位装置の信号・情報処理装置7が、TDOAとFDOAを複数回計測するとともに、電波源が等速直線運動するものと仮定し、電波源の初期位置と速度を未知変数とする、前記TDOAとFDOAに関する方程式を前記TDOAとFDOAの複数回の計測結果に従って解き、前記電波源の初期位置と速度を算出する。
(もっと読む)
移動体用測位システム及びGNSS受信装置

【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行う移動体用測位システムは、基準局と移動体とを有する。基準局は、固定位置に配置され、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて補正データを生成する手段と、補正データを移動体に送信する手段とを有する。移動体は、基準局から送信される補正データを受信する手段と、該移動体で観測して得られる衛星電波の観測データと、受信した補正データとに基づいて、該移動体の位置を測位する測位手段とを有する。
(もっと読む)
移動体監視装置、移動体監視方法、移動体監視システムおよびコンピュータプログラム
【課題】複数の移動通信端末が同一の局所領域に位置しているときは通報を回避する移動体監視装置を提供する。
【解決手段】移動体監視装置30は、第1移動通信端末の位置情報(第1位置情報)が予め登録した監視エリア情報に含まれるか否か判定する現在位置判定部33と、第1位置情報と第2移動通信端末の位置情報(第2位置情報)とを照合することにより第1移動通信端末および第2移動通信端末が同一の局所領域に位置しているか否か判定する同位置判定部34と、第1位置情報が監視エリア情報に含まれないとき、かつ第1移動通信端末および第2移動通信端末が同一の局所領域に位置していないとき、第2移動通信端末および予め設定された他の端末のうち少なくとも一つにアラームを送出する通報部35と、を備えている。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
速度計測装置および変位計測装置
【課題】データサイズの制限による値域の制限を有するデータを用いる場合でも、新たに定義する不定値に基づく不定性の概念を利用することにより、受信点の速度を求めることができる速度計測装置、および受信点の変位を求めることができる変位計測装置を提供する。
【解決手段】データ処理部3は、搬送波位相のデータを含む測位用データに基づいて、搬送波位相の速度成分を算出する。続いて、データ処理部3は、搬送波位相のデータに関するデータサイズまたは時間間隔に応じた搬送波位相の速度成分の不定値を算出する。続いて、データ処理部3は、搬送波位相の速度成分に不定値を加算することによって、不定性を解消した搬送波位相の速度成分を算出し、それと方向余弦とに基づいて、受信点の速度を算出する。続いて、データ処理部3は、受信点速度を積算することによって受信点の変位を算出する。
(もっと読む)
目標追尾装置
【課題】アンセンテッドカルマンフィルタの推定精度を、観測条件によらずに安定化させることのできる目標追尾装置を得る。
【解決手段】追尾フィルタにおける運動モデルと観測モデルが非線形関数で表される場合に、非線形関数をアンセンテッド変換により近似するアンセンテッドカルマンフィルタを適用した追尾フィルタ2を備え、追尾フィルタ2は、受信信号に基づいて算出された目標の測位結果を逐次読み込み、測位結果からアンセンテッドカルマンフィルタを適用して算出した予測値と測位結果とに基づいて、測位結果に対する予測値の適合度を逐次算出する予測値適合度評価部22と、予測値適合度評価部22で逐次算出された適合度に基づいて、アンセンテッドカルマンフィルタにおけるアンセンテッド変換のスケーリングパラメータを逐次更新するパラメータ設定部24とを備える。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
最良のWLAN−PS導出解を選択することによるハイブリッド衛星/WLAN測位システムを使用した位置を決定する方法及びシステム
【課題】
本発明は、ハイブリッド測位システムを作るためにWLANを利用した測位システム(WLAN‐PS)及び衛星を利用した測位システム(SPS)を統合する方法を提供する。
【解決手段】
統合された又はハイブリッドのシステムは、測位及び速度推定及び方位推定の精度及び予測誤差推定の精度を高めるため、及び独立して機能する各個別のシステムと比較して消費電力を低減するために、1つ又はそれ以上のシステムからの測定値を組み合わせるシステムを指している。ハイブリッド測位システムを作り出すためにWLAN−PS及びSPSを統合する方法は、別の入力として未処理のSPS測定値をWLAN−PSへ及び別の入力としてWLAN‐PS最終推定をSPSに追加することができる。2つ又はそれ以上の衛星からの未処理のSPS測定値は、WLAN−PSが位置推定、HPE及び静止ユーザー検出の精度を高めることを支援することができる。WLAN−PS初期位置推定及び他の推定は、同様に、SPSが初回測位時間(TTFF)及び電力消費を低減することを支援することができる。ハイブリッド測位システムは、更に、精度向上又は他の推定に関する値を追加していない時には、WLAN−PS又はSPSの動作を停止することで、別々に作動するWLAN−PS及びSPSと比較して電力消費を低減することができる。
(もっと読む)
ナビゲーション装置
【課題】車両に載置されているときに限り表示手段に交通情報を表示するナビゲーション装置を提供する。
【解決手段】所定時間毎にGPS衛星からの電波を受信し現在位置を検出する現在位置検出手段と、少なくとも渋滞情報を含む交通情報を受信する受信手段と、表示手段と、交通情報を表示手段に表示する制御手段とを備えたナビゲーション装置において、制御手段は現在位置検出手段により検出された現在位置に基づいてナビゲーション装置の移動速度を算出し、算出した移動速度が所定速度以上であると判断すると交通情報を表示手段に表示する
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】移動体が傾斜のある場所を移動している際にも、加速度センサの出力に含まれるセンサ固有の誤差の補正が可能で精度よく移動体の現在位置を算出することが可能なナビゲーション装置を提供する。
【解決手段】所定時刻taのGPS速度Vg(ta)と時刻taから算出間隔経過後の時刻tbのGPS速度Vg(tb)の差分が許容値より小さいことにより移動体が等速度であると判定し、前回等速度と判定した時刻t1の加速度センサの出力値である加速度Axの平均値Ax1と、今回等速度と判定した時刻t2の加速度Axの平均値Ax2が一致することにより、時刻t1と時刻t2に移動体が移動する斜面の傾斜角θが同一として前記傾斜角θを求め、前記傾斜角θを用いて加速度センサの誤差αを補正値として算出し、加速度センサの出力を前記補正値により補正した値を用いて、移動体の現在位置を算出する。
(もっと読む)
移動端末、並びにその屋内外判定方法及びプログラム
【課題】地図情報を用いず正確に屋内外判定を行うことが可能な移動端末、並びにその屋内外判定方法及びプログラムを提供する。
【解決手段】移動端末1を、GPS衛星4からGPS受信器11を用いて受信した測位用信号SG1の受信電力RRPを測定する電力測定部12と、測位用信号SG1に含まれる位置情報I1から、移動端末1の移動距離LMを推定する移動推定部13と、受信電力RRP及び移動距離LMに基づき、移動端末1が屋内又は屋外のいずれに位置するか判定する判定部14とで構成する。また、判定部14は、送信部20に対して前記判定の結果に応じた制御信号SG2を与えることにより、他の通信装置に対して送出される無線信号の送信電力を制御する。
(もっと読む)
移動体の位置検出装置、および位置検出装置を利用した車両制御装置
【課題】高精度で相対位置を測定すると共に相対位置に誤差が積算されることを防止することが可能な位置検出装置、および当該位置検出装置を利用した車両制御装置を提供する。
【解決手段】移動体の位置検出装置10は、複数のGPS衛星からのGPS信号を受信する受信アンテナ11と、各GPS信号の搬送波の位相を検出開始時刻から所定時間ごとに検出し、当該所定時間ごとの位相差を積算することにより、検出開始時刻からの位相変化量を演算する位相差積算部15と、位相差積算部により演算された位相変化量に基づいて、検出開始時刻における基準位置に対する相対位置を演算する相対位置演算部16と、を備える。
(もっと読む)
複数モード位置決定方法およびシステム
方法、装置、および/又はシステムは、アイテムが大体静止していない場合に位置決定装置を用いて第1モード位置決定プロセスを選択的に開始し、アイテムが大体静止している場合に位置決定装置を用いて第2モード位置決定プロセスを少なくとも選択的に開始するために提供される。 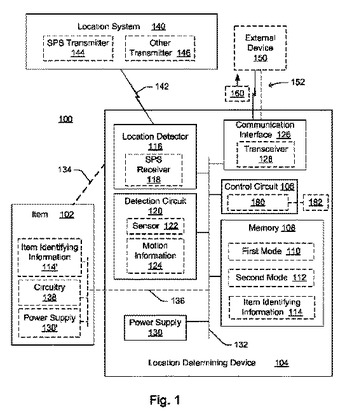 (もっと読む)
(もっと読む)
移動体用測位システム
【課題】基準局側で導出される速度補正データを用いて精度良く移動体の位置等を測位することができる移動体用測位システムの提供。
【解決手段】本発明による移動体用測位システムは、基準局20に設けられ、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて速度補正データを生成する補正データ生成手段50,52と、前記基準局に設けられ、該基準局で観測して得られる衛星電波の観測データと、前記速度補正データとを移動体に送信するデータ送信手段54と、前記移動体30に設けられ、前記基準局から送信される前記観測及び速度補正データを受信するデータ受信手段40と、前記移動体に設けられ、該移動体で観測して得られる衛星電波の観測データと、前記データ受信手段で受信した前記観測及び速度補正データとに基づいて、該移動体の位置を測位する測位手段42,44,46,48とを備えることを特徴とする。
(もっと読む)
宇宙機測位システム
【課題】 複数配置されたビーコン発信機からの信号を利用して、GPS信号を受信できない宇宙空間で、より精度の高い位置や速度の同定を行なうことのできる宇宙機測位システムを得ることを目的とする。
【解決手段】 着陸目標地点の周囲に4機配置され、軌道データと基準時刻を含めたビーコン信号を発信するビーコン発信機と、宇宙機に搭載され、ビーコン発信機の電波を受信する送信アンテナと、送信アンテナにより受信した少なくとも4機のビーコン発信機からのビーコン信号に基づいて、自身の位置座標および速度を計算する演算処理装置とを備える。
(もっと読む)
ハイブリッドSPS軌道データを用いた位置判定のための方法および機器
移動局が、衛星軌道データのハイブリッド合成を用いてその位置(または速度)および時間を判定するための方法およびシステム。一態様では、移動局は、確定点の判定において、ある衛星からの予測軌道データと、別の衛星からのリアルタイム軌道データとを合成する。合成は、同じまたは異なる衛星システム内の衛星に対して行うことができる。移動局は、ある期間におけるある衛星のリアルタイム軌道データ、および別の期間における同じ衛星の予測軌道データを用いることができる。別の態様では、移動局は、リアルタイム軌道データを用いて、予測軌道データ中のクロック・バイアスを補正することができる。クロック・バイアスへの補正は、リアルタイム軌道データを提供する同じ衛星にも、同じまたは別の衛星システム内の異なる衛星にも行うことができる。  (もっと読む)
(もっと読む)
移動体用測位装置
【課題】測位結果と他のセンサの検出結果とを精度良く同期させることができる移動体用測位装置の提供。
【解決手段】基準時刻における移動体の位置及び速度を測位する測位手段と、移動体の状態を検出する状態検出センサと、状態検出センサの検出結果をクロック周期で伝送する伝送路と、同期手段とを備え、同期手段は、複数のクロック周期に亘った状態検出センサの各検出結果のうちから、同期させるべき検出結果を特定する第1同期手段と、基準時刻を推定する推定手段と、第1同期手段により特定された検出結果が検出された検出時刻と、基準時刻との時間差を算出する時間差算出手段と、算出した時間差と、基準時刻における移動体の位置及び速度の測位結果とを用いて、検出時刻における移動体の位置を補間により算出し、該移動体の位置の算出結果と、第1同期手段により特定された検出結果とを対応付ける第2同期手段とを備える。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
GPS受信機
【課題】高速移動中でも、地図画面をスムーズに更新することのできる携帯型のGPS受信機を提供すること。
【解決手段】GPS受信機は、現在の所在地と過去の所在地とに基づき、次フレームの所在地を推定し(S108)、次フレームの所在地と現在の所在地とに基づき、更新データ量を推定する(S110)。更新データ量が所定値を超えていると判断した場合に(S112でNO)、現在の所在地の表示位置が画面の端部になるように、地図サーバより地図データをダウンロードする(S120,S124,S126)。
(もっと読む)
81 - 100 / 203
[ Back to top ]