
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
21 - 40 / 203
地上装置
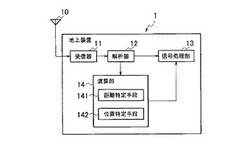
【課題】航空機が送信する信号に含まれる位置情報から、容易な構成で正確に自装置の位置を特定する。
【解決手段】距離特定手段と、位置特定手段とを備える。距離特定手段は、第1信号を送信した航空機の位置である第1送信位置から前記地上装置までの距離と、第1送信位置から移動後に第2信号を送信した当該航空機の位置である第2送信位置から前記地上装置までの距離とをそれぞれ求める。位置特定手段は、前記距離特定手段によって、航空機と前記地上装置との距離が複数求められると、求められた複数の距離を用いて当該地上装置の位置を特定する。
(もっと読む)
衛星測位装置

【課題】より精度良く現在位置を算出する「衛星測位装置」を提供する。
【解決手段】各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す移動ベクトルVd(t)とを求め、移動ベクトルVs(t)と移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。そして、差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。
(もっと読む)
無線通信を利用した周辺車両感知システム及びその方法
【課題】周辺車両との衝突を予測できる無線通信を利用した周辺車両感知システム及びその方法を提供する
【解決手段】 本発明に係る無線通信を利用した周辺車両感知システムは、無線信号を発生させる複数個の無線信号発信部と、周辺車両から発生した無線信号を受信する複数個の無線信号受信部と、受信された無線信号の強度に応じて周辺車両との距離を算出する周辺車両距離算出部と、前記複数個の無線信号受信部の間の距離と前記算出された周辺車両との距離を利用し、前記周辺車両の位置を推定する周辺車両位置推定部と、前記周辺車両の位置を利用して前記周辺車両の時間当り移動距離から前記周辺車両の走行速度を推定する周辺車両走行速度推定部と、前記周辺車両の位置を利用して前記周辺車両の走行方向を推定する周辺車両走行方向推定部とを含むことを特徴とする。
(もっと読む)
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
衛星信号判定装置及びプログラム
【課題】GPS受信機が内部に設けられていても、測位衛星の遮蔽状態を精度良く判定することができるようにする。
【解決手段】車両方向推定部30によって、各GPS情報と、検出された車速及びヨーレートとに基づいて、車両の進行方向の絶対方向を推定する。衛星方向推定部32によって、各GPS情報に基づいて、各測位衛星が存在する絶対方向を推定する。衛星方向推定部32によって、車両の進行方向の絶対方向、及び各測位衛星の絶対方向に基づいて、車両の進行方向に対する各測位衛星の相対方向を算出する。遮蔽判定部38によって、各測位衛星について、車両の進行方向に対する相対的な立体方向の範囲を分割した複数の分割範囲のうち、算出された相対方向が属する分割範囲に対して予め定められたS/Nの閾値を用いて、当該測位衛星の衛星信号のS/Nが、閾値以上であるか否かを判定して、当該測位衛星の遮蔽状態を判定する。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 車両移動を含む移動経路の軌跡の取得精度を向上させることができて、且つ、消費電力量を抑えることのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段(15)と、方位及びユーザの動きを計測する計測手段(16、17)と、計測手段の計測結果に基づき、ユーザの移動種別又は停止の判定を行う判定手段(21)、及び、ユーザの移動方向を特定する特定手段(22)と、車両による平均移動速度を算出する移動速度算出手段(10)と、車両による移動中に、特定手段で特定された移動方向へのこの平均移動速度での移動距離を、絶対位置測定手段により求められた基準位置情報に積算することにより移動位置を求める位置算出手段(10)と、を備える。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
移動体高精度速度計測装置及び方法
【課題】GPS受信機から得られるドップラー速度情報の良否を判定し、高精度及び高信頼の速度をリアルタイムに出力する装置及び方法を提供すること。
【解決手段】移動体高精度速度計測装置10は、移動体の加速度及び角速度からストラップダウン演算により速度を算出し、GPS搬送波のドップラーシフト量から移動体のドップラー速度を測定し、ドップラー速度から良否係数を算出する。次に、遅延させたドップラー速度と、フィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量を算出し、算出した誤差量に良否係数を乗算し、良否係数を乗算した誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。そして、ストラップダウン演算により算出した速度に、カルマンフィルタによって推定演算された調整量を融合してリアルタイム補間速度を算出し、出力する。
(もっと読む)
GPS測位演算方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的に測定点での測位精度の改善が可能な技術を提供する。
【解決手段】GPS測位演算装置10は、GPS衛星から発せられる信号に含まれる軌道情報から、信号発信時点でのGPS衛星の、位置Aと、軌道速度vと、時刻tbと、高度hに関する軌道情報を取得し(S105)、軌道速度vと時刻tbとから、測定点が信号を受信した時刻trでのGPS衛星の位置Bを時刻差t=tr−tbから算出し(S106)、GPS衛星の位置Bと測定点の位置Oとを結ぶ第1の線分に対する地平線の第1の角度αを第1の線分の距離ctと高度hから算出し(S107)、第1の線分の距離ctと、第1の角度αと、軌道速度vとに基づき、GPS衛星の位置Aと測定点の位置Oとを結ぶ第2の線分の距離csを算出し(S107)、測位演算を行う(S111)。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法が適用された測位系の受信装置において、測位に適用される航行衛星の速度または位置の速やかな識別を可能とする測位支援装置に関し、ハードウェアやソフトウェアの構成が大幅に変更されることなく、高い精度による測位の開始を安価に実現できることを目的とする。
【解決手段】新たに測位に適用される航行衛星にかかわる物理量をフィードバック制御の下で求める測位支援装置であって、前記航行衛星から時系列の順に到来した航法データに応じて求められた前記物理量の列が前記フィードバック制御の過渡的な応答を示す式に代入された連立方程式の根として、前記物理量の収束値を推定する推定手段と、前記収束値を前記測位に適用する測位促進手段とを備える。
(もっと読む)
位置監視装置、位置監視プログラムおよび位置監視方法
【課題】移動端末が独自に位置情報を算出する場合であっても、各携帯端末の近くにいる人や物を正確に判定すること。
【解決手段】一緒に行動しているユーザ同士は、動きの変化が同じになると考えられる。この点に着目し、位置監視装置100は、ユーザの動きが変化した時点での位置座標を算出し、他の位置監視装置から、他のユーザの動きが変化した時点での位置座標を算出する。そして、位置監視装置100は、各位置座標を比較して、各位置監視装置間の距離を算出する。このように、動きの変化によってタイミングを計り、位置座標を算出することで、各位置監視装置間の近くにいる人や物を正確に判定することができる。
(もっと読む)
衛星測位システムにおいて時間を決定するための方法および装置
【課題】衛星測位システムにおいて時間を決定するための方法および装置。
【解決手段】一つの実施態様において、基準時間は、他のナビゲーション情報を決定するのに使用される。そのようなナビゲーション情報は、例えば、衛星測位システム(SPS)の受信機のローカル/位置を含む。一つの実施態様において、SPSの受信機と1組の一つ以上の衛星との間の相対速度は、SPSの受信機により示されるような時間と基準時間との間のオフセットを決定するために使用される。他の実施態様に関して、誤り統計が、基準時間を決定するために使用される。他の実施態様に従って、衛星の少なくとも位置を各々代表する二つの記録が比較され、時間を決定する。一つの実行において、SPSの受信機は移動であり、前記方法の一つ又は組み合わせにより、基地局に関連して時間と/又は他のナビゲーション情報を決定するように動作する。
(もっと読む)
測位装置および測位方法
【課題】消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できるようにする。
【解決手段】携帯端末は、測位した現在位置から目的地までの距離が定められた距離を超えている場合には、現在位置から目的地までの移動速度を演算し、演算結果と目的地までの距離から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。目的地までの距離が定められた距離未満である場合には、周期的に現在位置を測位する。
(もっと読む)
測位装置及び方法
【課題】WLAN測位により特定された位置が信頼できるかどうかを判定すること。
【解決手段】位置を測定する測位装置は、アクセスポイントからの電波に基づいて、測位を行うWLAN測位演算部と、測位衛星からの電波に基づいて、測位を行う衛星測位部と、衛星測位部による測位の際に取得されるべき位置情報又は測位位置に基づいて、該位置情報又は測位位置から所定の範囲に、WLAN測位演算部による測位結果が存在するかどうかを判定する測定結果判定部と、判定された結果に基づいて、測位結果を採用するかどうかを判定する測位結果採用判定部とを有する。
(もっと読む)
現在位置表示装置
【課題】GPS衛星信号に基づいて現在位置を算出するのに必要な演算時間と、現在位置表示装置の加減速状態とを考慮して、現在位置をより適正な位置に表示する。
【解決手段】過去の複数のGPS測位位置における現在位置表示装置の速度変化率を取得する速度変化率取得手段と、過去の複数のGPS測位位置に対する各重み付け係数を記憶する重み付け係数記憶手段と、過去の複数の速度変化率と対応する各重み付け係数とに基づき、最新の前記GPS測位位置における現在位置表示装置の速度変化率を予測速度変化率として算出する予測速度変化率算出手段と、最新のGPS測位位置と予測速度変化率とに基づき、GPS受信機によるGPS測位位置の出力時における現在位置表示装置の位置を推定位置として算出し、地図上の前記推定位置に現在位置マークを表示させる表示制御手段と、を備える。
(もっと読む)
相対速度計測装置および相対変位計測装置
【課題】本発明は、衛星航法系を構成する航行衛星の相対速度と相対変位とをそれぞれ求める相対速度計測装置および相対変位計測装置に関し、航行衛星の相対速度の値域が制限されている場合であっても、所望の航行衛星の相対速度や相対変位を効率的にかつ精度よく求めることを目的とする。
【解決手段】衛星航法系を構成する1つの航行衛星について求められ、かつ値域r1、…、rpを個別に有する複数pの相対速度y1、…、ypと、前記値域r1、…、rpの幅w1、…、wpと、前記幅w1、…、wpに対応する整数h1、…、hpとに対してE=y1+w1・h1=…=yp+wp・hpが所定の精度で成立する相対速度Eを得る。
(もっと読む)
移動通信端末及び測位方式選択方法
【課題】端末の移動速度が様々変化する場合であってもそれに応じて測位誤差を低減すること。
【解決手段】この移動通信端末1は、複数の測位演算方式によって測位演算が可能に構成された端末であって、移動通信端末1の移動速度を検出する速度センサ部14と、GPS測位方式による測位演算を処理するGPS測位部11と、GPS測位方式よりも演算時間の短い無線LAN測位方式による測位演算を処理する無線LAN測位部12と、速度センサ部14によって検出された速度が所定の基準によって高速であると判断される場合には、無線LAN測位部12に対して測位演算を要求し、速度が所定の基準によって低速であると判断される場合には、GPS測位部11に対して測位演算を要求する測位方式選択部15とを備える。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
21 - 40 / 203
[ Back to top ]