
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
41 - 60 / 203
位置推定装置及びプログラム
【課題】精度よく移動体の位置を推定する。
【解決手段】車両に搭載される位置推定装置であって、GPS情報取得部20で、複数のGPS衛星の各々から発信された、各々のGPS衛星の軌道情報、GPS擬似距離データ、及びドップラー周波数情報を含むGPS情報を取得し、軌跡推定部40で、取得されたGPS情報に基づいて自車両の速度ベクトルを算出し、算出した速度ベクトルを所定時間分積算して自車両の軌跡を算出する。また、取得したGPS擬似距離データ及びGPS衛星の軌道情報から取得されるGPS衛星の位置座標を擬似距離・衛星位置記憶部に記憶しておく。そして、最適化位置推定部60で、自車両の軌跡上のエポック毎の各GPS衛星との距離と、そのエポックにおける擬似距離との擬似距離差分の全GPS衛星の全エポック数分の和が最小となるように自車両の軌跡を平行移動させて移動体の位置を推定する。
(もっと読む)
位置検知プログラム、位置検知装置および位置検知方法

【課題】測位誤差によって位置情報の誤測位が発生しても、誤った位置情報に影響されずに正確に移動経路ごとに作業対象となった作業地を検知すること。
【解決手段】位置検知装置100は、連続した位置情報Pを複数個ごとにグループ化し、同一のグループに含まれる位置情報Pが示す作業地の多数派を真の作業地として採用する。そこで、位置検知装置100は、移動経路を誤差幅よりも十分に長くなる距離ごとに分割し(S11)、分割した移動経路に含まれる位置情報Pから作業地候補を特定する(S12)。したがって、グループ1では、位置情報P1〜P6が示す圃場A,Bが、グループBでは、位置情報P7〜P11が示す圃場Aがそれぞれ作業地候補となるため、位置検知装置100は、S12によって特定された作業地候補の中から、多数派となる作業地を作業中の作業地に決定する(S13)。
(もっと読む)
騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置
【課題】構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することのできる騒音測定装置を提供する。
【解決手段】騒音測定システム3の固定局2は、第1衛星測位装置21と第1記録部22を有し、移動局1は、騒音計11、第2衛星測位装置12および第2記録部11を有する。第1衛星測位装置21は、地球上の所定の基準点に固定され、この基準点を経時的に測位して基準点データを得る。第1記録部22は、基準点データを時刻と対応づけて記録する。第2衛星測位装置12は、固定局2の第1衛星測位装置21が上記基準点を測位して基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて、騒音計11の位置を測位する。第2記録部11は、騒音計11によって測定された騒音レベルを第2衛星測位装置12によって測位された騒音計11の位置および時刻と対応づけて記録する。
(もっと読む)
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
(もっと読む)
複数人配置確認支援システム
【課題】複数人の配置を正確に把握する。
【解決手段】フォーメーション確認支援システム1は、携帯端末2、基地局3及び管理サーバ4を備える。携帯端末2は、測定対象領域にいる各人に装着され、当該携帯端末2に固有の端末IDを含む電波を発信する発信部を有する端末である。基地局3は、測定対象領域の周囲に設置され、1以上の基地局3が携帯端末2と通信可能な範囲が測定対象領域全体をカバーするように基地局3の台数及び設置位置が調整される。そして、携帯端末2から電波を受信し、その受信した電波に基づいて当該携帯端末2の方向及び距離を求め、求めた携帯端末2の方向及び距離と、基地局3自体の位置とから携帯端末2の位置を算出し、算出した携帯端末2の位置、端末ID及びその時の時刻を含む位置情報をサーバ4に送信する。管理サーバ4は、基地局3から各携帯端末2の位置情報を随時受信し、記憶するとともに、各携帯端末2の配置を表示する。
(もっと読む)
測位時間間隔制御装置及び測位時間間隔制御方法
【課題】移動状態及び/又は移動速度に応じて、測位すべき時間間隔及び位置を通知すべき時間間隔を変更すること。
【解決手段】位置を測定する時間間隔を制御する測位時間間隔制御装置は、移動端末装置の移動状態と、移動速度とを取得する取得部と、該取得部により取得された移動端末装置の移動状態と、移動速度とに基づいて、移動端末装置の位置を測定すべき時間間隔、及び該測定により得られた位置情報を出力すべき時間間隔を設定する測位時間間隔設定部とを有する。測位時間間隔設定部は、移動端末装置の移動状態及び/又は移動速度が変化した場合に、前記時間間隔を変更し、移動端末装置は、測位時間間隔設定部により設定された時間間隔で、移動端末装置の位置情報を取得し、該位置情報を出力する。
(もっと読む)
測位装置及びプログラム
【課題】簡易な方法でマルチパスの影響を考慮した信頼性の高い測位結果を得る。
【解決手段】測位演算部26で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数に基づいて、受信位置の位置座標及び速度を演算する。建物高情報取得部30で、建物高情報記憶部28に記憶された緯度及び経度に対応した建物高情報から、演算された位置座標に対応した受信位置周辺の建物高情報を取得する。観測誤差算出部34で、GPS受信機12から出力された衛星仰角、取得された建物高情報、演算された位置座標及び速度に基づいて、擬似距離誤差及びドップラーシフト誤差を算出し、誤差補正測位演算部36で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数、並びに観測誤差算出部34によって算出された擬似距離誤差及びドップラーシフト誤差に基づいて、誤差を補正した受信位置の位置座標及び速度を演算する。
(もっと読む)
位置測定装置および位置測定方法
【課題】 受信信号の帯域幅に影響されることなく、かつ回路規模の削減が可能で、さらに異なる発射源からの電波に対しても、それぞれの発射源位置を分離して測定することが可能な位置測定装置の提供。
【解決手段】 位置測定装置は、移動しながら電波発射源からの電波を受信する2つの移動体受信部1a,1bと、2つの移動体受信部1a,1bで受信される信号を取得してその周波数差を算出し、その周波数差の時間的変化から電波発射源の位置を測定する発射源位置測定部10とを含む。
(もっと読む)
現在位置表示装置
【課題】GPS信号に基づく現在位置算出に要する時間だけ後の現在位置表示装置の推定位置を求め、この推定位置を現在位置として表示する。
【解決手段】現在位置表示装置1は、GPS衛星信号を受信し所定の演算時間後に現在位置表示装置1の位置をGPS測位位置として算出するGPS受信機11と、現在位置表示装置1の速度を検出する速度検出手段13と、GPS測位位置の履歴を記憶する測位位置記憶手段15と、前記速度検出手段13により検出された現在位置表示装置1の速度と、前記GPS測位位置とから、前記演算時間だけ後の現在位置表示装置1の位置を推定位置として算出する制御手段10と、前記推定位置に基づいて現在位置表示装置1の位置マークの表示位置を調整する表示制御手段19と、を備える。
(もっと読む)
位置算出方法及び位置算出システム
【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車の位置を正確に検出して列車の速度を制御する。
【解決手段】GPS受信機3a,3bから出力される位置情報により算出したGPSアンテナ2a,2b間の距離と方位と列車1の走行経路が制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と近似しているかどうかを判定するとともにGPS受信機3a,3bから出力される速度情報が列車1の実走行速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報により列車1の走行位置を決定して列車1の走行位置を検出するための地上子等を地上に設置する必要がなく、地上設備を簡略化して設備費を低減する。
(もっと読む)
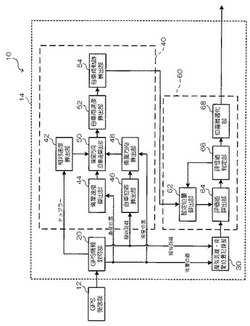
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
高度出力装置、高度出力方法及びプログラム
【課題】GPS信号に基づく3D測位による高度表示の不適切な変動を防止すること。
【解決手段】GPS信号に基づいて移動体のGPS高度を算出するGPS処理部と、気圧を計測する気圧計測部と、前記GPS処理部により算出されるGPS高度の信頼度を判定する判定部と、前記判定部により判定される前記信頼度に応じて、前記移動体の絶対高度を出力する出力部と、を備え、前記出力部は、前記信頼度が予め定義される出力基準を満たす場合には、前記GPS処理部により算出された最新のGPS高度を前記移動体の絶対高度として出力し、前記信頼度が前記出力基準を満たさない場合には、絶対高度の過去の出力値と前記気圧計測部により計測された気圧とを用いて算出される高度を前記移動体の絶対高度として出力する、高度出力装置を提供する。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】 移動体の移動速度が様々に変化する場合でも、常に適切な間隔で位置データを記録していくことのできる測位装置、位置データの記録方法およびプログラムを提供する。
【解決手段】 移動体に保持されて現在位置の測定が可能な測位手段と、この測位手段による現在位置の測定を所定間隔で行わせる測位制御手段(S1〜S11)と、前記測位手段の測定によって順次取得される一連の位置データのうち一部の位置データの記録を省いて一部の位置データの記録を行う記録制御手段(S12〜S16)とを備え、移動体の移動速度が大きいときには位置データの記録を省く割合が大きくなり、前記移動体の移動速度が小さいときには位置データの記録を省く割合が小さくなるように、前記一連の位置データの記録制御を行う。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】追加のセンサを用いることなく正確な推定航法を行うことができる車両用推定航法装置を提供する。
【解決手段】走行車両に搭載されたGPS受信機によるGPS情報から当該車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、前記車両に装着されたタイヤ回転情報検出手段から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを算出する第2パラメータ算出手段とを備えている。
(もっと読む)
測位装置及びプログラム
【課題】擬似距離誤差を精度良く算出して、受信位置を精度良く算出できるようにする。
【解決手段】測位演算部26によって、複数の測位衛星の擬似距離に基づいて、測位衛星の組み合わせ毎に、受信位置を算出する。高度誤差算出部30によって、測位衛星の組み合わせ毎に、高さ誤差を算出する。正常衛星選択部32によって、正常な測位衛星を4つ選択する。観測誤差算出部34は、測位衛星の組み合わせ毎の高さ誤差と擬似距離誤差との関係式、及び正常な測位衛星についての高さ誤差と擬似距離誤差との関係式を含む連立方程式を解くことにより、複数の測位衛星の擬似距離誤差を算出する。誤差補正測位演算部36によって、算出された複数の測位衛星の各々の擬似距離誤差を用いて、受信位置を算出する。
(もっと読む)
移動体表示装置
【課題】移動体の特定の挙動を検出することで、その挙動を示した位置を自動的に記憶することができる移動体表示装置を提供する。
【解決手段】移動体表示装置としてのプロッタ装置は、GPS受信機と、メモリと、CPUと、を備える。GPS受信機は、測位信号を取得して、当該自船の位置を算出する。また、GPS受信機は、測位信号に基づいて、自船の速度又は向きを算出する。メモリは、GPS受信機で算出した前記速度が所定時間内に所定の変化量以上変化したこと、又は、GPS受信機で算出した向きが所定時間内に所定角度以上変化したことを検出した場合に、前記変化が生じた位置を記憶する。CPUは、前記変化が生じた位置に対応するマークをディスプレイに表示するための処理を行う。
(もっと読む)
衛星信号受信装置
【課題】移動可能な衛星信号受信装置において、弱信号に対する追尾性能を向上する。
【解決手段】衛星信号受信装置40は、強信号を追尾する追尾チャンネル42iの搬送波追尾ループ26から出力された追尾情報に基づいて衛星信号受信装置40の移動速度を推定する速度推定器46と、前記移動速度に基づいて弱信号の受信周波数を推定し、前記弱信号を追尾する追尾チャンネル440に前記推定した受信周波数を出力する周波数推定器48とを有する。この場合、弱信号を追尾する追尾チャンネル440の搬送波追尾ループ26は、周波数推定器48が推定した前記受信周波数を用いて弱信号中の搬送波を追尾し、一方で、当該追尾チャンネル440のコード追尾ループ38は、該受信周波数を用いて弱信号中のコードを追尾する。
(もっと読む)
測位方法および装置
【課題】本発明は測位装置に関し、マルチパス多発地帯でも受信手段の出力の異常判定を正確に行い、測位装置の位置精度の低下を防ぐ方法および装置を提供する。
【解決手段】上記課題は、擬似距離から算出された受信位置と、ドップラ周波数から算出された受信速度及び受信方位を分けてそれぞれの有効性判定を行うことにより、受信状況が直達波,直達波と反射波の合成波,反射波であるかを判定し、直達波を受信している時には受信位置を測位位置とし、直達波と反射波の合成波を受信したときでも、受信速度及び受信方位を有効と判定できる場合には、直前の受信位置を基に受信速度及び受信方位から測位装置の位置を補正して測位位置を求めることにより解決される。
(もっと読む)
41 - 60 / 203
[ Back to top ]