
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
121 - 140 / 203
GPS測位回路の電源オン/オフを調整する移動端末および方法
移動端末の位置を測定する方法であって、GPS信号を使用して移動端末の位置を測定するGPS受信機回路への電源オンと電オフを繰り返し切り替える工程を有する。GPS受信機回路の電源オン対電源オフのデューティ比が、移動端末が前の測定位置から移動した距離に対応して調整される。電源オン対電源オフのデューティ比は、GPS信号途絶の確認に対応して、GPS測定の前の位置からの加速度から算出の距離、移動端末の加速度から算出の速度、セルラシステムからの測位支援情報の入手性、WLAN/ブルートゥースデバイスからの信号の存在/不存在、および/または新しいセルラ基地局IDの検出に対応して、調整されてもよい。 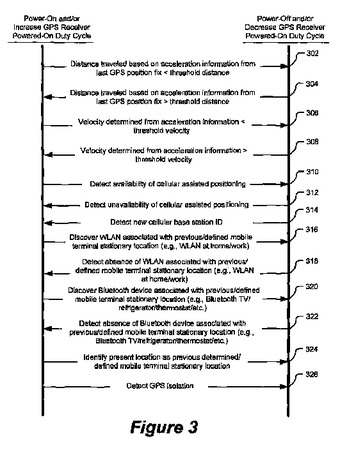 (もっと読む)
(もっと読む)
ナビゲーション装置
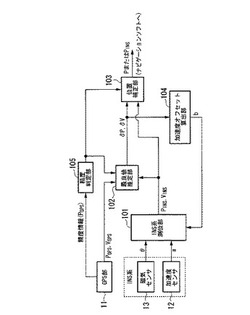
【課題】加速度センサのオフセット誤差を補正することができ、それにより加速度センサを用いた測位を精度良く行うことが可能なナビゲーション装置を提供する。
【解決手段】GPS部11より求められた位置PGPSおよび速度VGPSと、加速度センサ12および磁気センサ13により求められた位置PINSおよび速度VINSと、に基づいて現在の最も確からしい位置に関する最良値δPを推定する最良値推定部102と、推定された最良値δPに基づき、位置PINSの誤差が加速度センサ12のオフセット誤差に起因したものであるとして該オフセット誤差の分だけ加速度を補正するための加速度オフセット値を算出する加速度オフセット算出部104手段と、を備える。
(もっと読む)
ナビゲーション装置

【課題】ナビゲーション装置において、進行方向と地磁気センサの向きとのズレを補正して精度良く位置を求める。
【解決手段】GPS部11および磁気センサ12による計測結果に基づいて進行方向φと磁気センサ12が向いている方位θとの差分を求め、該求めた差分によって磁気センサ12により求めた方位θの補正を行う方位補正部101と、補正後の方位θ’とGPS部11による過去の計測結果である位置PGPSおよび速度Vとに基づいて現在の位置PMAGを算出する位置算出部102と、を備える。
(もっと読む)
物体の位置追跡デバイス及び制御方法
【課題】電磁放射線放出に関する航空安全要件に適合する物体を追跡するためのデバイスを提供する。
【解決手段】本発明では、無線通信ネットワーク(11)を介してデータを伝送するための無線通信装置(4)と、測定デバイス(2)と、コントローラ(3)とを備え、無線通信装置(4)がコントローラ(3)により制御され、測定デバイス(2)がコントローラ(3)に接続される。測定デバイス(2)に基づいて、デバイスが航空機内にあるか又はフライト状態にある第1の輸送ステータスを検出する。これにより、無線通信装置に関する他の特徴を航空機の電子制御と干渉しないようにして制御できる。第1の輸送ステータスの不存在が検出された場合、無線通信装置は実施可能な付加的な基準に基づいて起動され、デバイスの検出位置及び対応する個別識別子を含むデータがデータセンタに送信される。
(もっと読む)
移動量計測装置及び位置計測装置
【課題】簡易な構成で、ロバスト性を確保して、移動体の移動量を精度よく計測することができるようにする。
【解決手段】GPSから、第1時刻及び第2時刻の各々で測定された測位位置と、第1時刻及び第2時刻の各々における受信信号の衛星番号群とを取得し(140)、第1時刻における衛星番号群と、第2時刻における衛星番号群とが同一である場合には(144)、第1時刻及び第2時刻で測定された測位位置の変化に基づいて、自車両の車速を算出する(146)。第1時刻と第2時刻とにおいて受信信号の衛星番号群が同一でない場合には(144)、過去の衛星番号群から、第2時刻における衛星番号群と同一の衛星番号群である時刻を検索し(148)、検索された時刻に測定された測位位置と、第2時刻における測位位置とに基づいて、自車両の車速を算出する(152)。
(もっと読む)
統合された全地球的航法衛星システム・センサおよび慣性センサを有する自動ブレード制御システム
ブルドーザ・ブレードのブレード上昇およびブレード傾斜角を制御するための方法および装置が開示される。上昇測定値およびスロープ角測定値は、ブルドーザ・ブレード上に設置された全地球的航法衛星システム(GNSS)アンテナおよび慣性測定ユニットから受信された測定値から算出される。慣性測定ユニットは、3つの直交方向に配置された加速度計および3つの直交方向に配置されたレート・ジャイロを含む。これらの測定値は、ブレード上昇、ブレード垂直方向速度、ブレード傾斜角、およびブレード傾斜角速度の推定値を算出するためのアルゴリズムによって、処理される。次いで、これらの推定値は、ブレード上昇およびブレード傾斜角を制御するブルドーザ油圧システムを制御するための制御信号を供給する制御アルゴリズムへの入力として、供給される。 (もっと読む)
携帯情報端末及び位置算出方法
【課題】自車両に新たな装置を搭載することなく、煩わしい操作を必要とせずに、自車両の駐車位置を把握することができ、また、ユーザが電車、バス、タクシー等を利用したときの乗車場所や降車場所を特定することが可能な携帯情報端末及び位置算出方法を提供する。
【解決手段】携帯情報端末は、ユーザの現在位置の絶対測位を行うGPS測位手段と、ユーザの歩数を計測する歩数計測手段と、時刻情報を取得する計時手段と、GPS測位手段により測位された位置情報と計時手段により取得された時刻情報とからユーザの移動速度を求め、移動速度と歩数計測手段により計測された歩数とに基づいて、ユーザが移動手段で走行中の状態にあるか歩行中の状態にあるかを識別するユーザ状態識別手段と、ユーザ状態識別手段による識別結果に基づいて、移動手段のパーキング位置及び移動手段の利用位置を算出する位置算出手段と、を有する。
(もっと読む)
衛星測位システム信号の処理
衛星測位システムからの信号を処理する方法は、衛星ブロードキャストのデータサンプルの記録ブロックであって、各ブロックが、受信機内で生成された1つ以上のタイムスタンプを含み、前記サンプルが前記受信機で記録された、記録ブロックを受信すること(50)と、第1の処理パラメータの組を使用して、前記データサンプルの記録ブロックを処理し、前記ブロック内に含まれる衛星送信を特定すること(52)とを含む。前記処理の結果に基づいて、前記ブロックのうちの1つが選択される(56、58)。前記選択されたブロックは、第2の処理パラメータの組を使用して処理され、少なくとも位置情報と衛星ブロードキャストタイミング情報とが導出される(60)。前記選択されたブロックの前記タイムスタンプと、前記選択されたブロックの処理(60)から得られた前記タイミング情報とが使用され、その他のブロックの処理(60)が補助される。前記方法では、タイムスタンプを衛星データと関連付け、位置データのオフライン処理を(例えば、データサンプル間の正確な相対タイミング情報を提供することにより)改善し、これにより、前記データを処理する処理電力及び/又は処理時間を低減することが可能となる。  (もっと読む)
(もっと読む)
圧力センサを用いたGNSSポジショニング
GNSSデータの精度を改良するためのシステム、方法、及びデバイスが提供される。具体的には、本発明の実施形態は、測位精度を改良するためにセンサ入力を有利に用いることができる。ナビゲーションシステム内の物理的な5つのセンサの使用、とりわけ、GNSSの高度データで調整され、且つ/又はブレンドされる圧力センサに由来する高度データは、特に有利であると見なされる。 (もっと読む)
GPS誤差補正、車両追跡及びオブジェクト位置
ディファレンシャルGPSについて誤り要因を決定する方法及びコンピュータプログラムが、車両追跡方法とともに、開示されている。誤り要因の決定において、推定される位置データはGPSからGPRSを介してサーバへ送信される。GPS信号は既知のルート、すなわち、道路又は線路、に沿って進む車両から送信されているので、データはルート及び計算される補正因数と一致しうる。次いで、誤り要因がディファレンシャルGPSデバイスへ送信される。車両追跡のために、GPSは、自身の位置にのみ関するデータを規則的な間隔でGPRSを介して送信する。 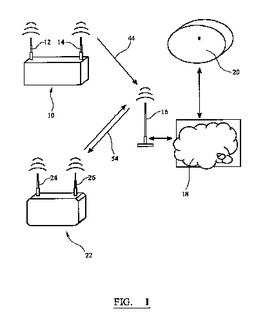 (もっと読む)
(もっと読む)
ビーコンを用いた電波識別リーダーの位置測定方法及びそのための電波識別システム
本発明は、ビーコンを用いた電波識別リーダー(RFID Reader:Radio Frequency Identification Reader)の位置測定方法及びそのための電波識別システムに関するものである。
本発明は、位置を測定する電波識別システムであって、ビーコンを送出する複数個のビーコン装置と、電波識別を用いて既格納された情報を送信する電波識別タグと、移動中に複数個のビーコン装置から複数個のビーコンを受信すれば、複数個のビーコンを用いて現在位置を計算し、電波識別を用いて電波識別タグから情報を受信する電波識別リーダーと、を含むことを特徴とするビーコンを用いた電波識別リーダーの位置を測定するための電波識別システムを提供する。本発明によれば、電波識別システムで移動する電波識別リーダーの位置を測定することができ、電波環境を考慮して電波識別リーダーの位置を測定するので、位置測定の正確度を上げることができる。  (もっと読む)
(もっと読む)
位置検出装置及び位置検出方法
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
GPS受信データの処理装置、処理方法及びプログラム
【課題】高架道路下などでGPS受信情報の測位遅れが発生した場合、その区間での速度は見かけ上遅くなり、次の区間での速度が見かけ上速くなる。すなわち、位置・時刻のデータに基づき算出した移動体の速度が、当該移動体の当該時刻前後の速度傾向に比べて離れてくる。
【解決手段】算出した速度を当該移動体の速度傾向に合わせるように前記移動体の位置・時刻のデータの時間ずれ補正を行うことにより、測位遅れを補正する。この補正データに基づき、移動体の速度、加速度などを算出する。
(もっと読む)
ロケーションベースのトラッキング
ここに開示される主題は、RF環境の変化に応じて、位置決定方式を使用して位置フィックスを得ることに関する。  (もっと読む)
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる誤差を精度良く反映する指標値を用いて、測位に用いる衛星を適切に選択すること。
【解決手段】本発明は、移動体に搭載され、該移動体の位置を測位する移動体用測位装置において、移動体に搭載されるセンサの出力信号により移動体が停止しているか否かを判定する移動体停止判定手段と、前記移動体停止判定手段により移動体が停止していると判定されている間に観測される衛星電波の観測値を用いて、移動体の速度を、衛星毎に導出する移動体速度導出手段と、
前記移動体速度導出手段により導出された衛星毎の移動体速度に基づいて、測位に用いる衛星を選択する衛星選択手段とを備えることを特徴とする。
(もっと読む)
GPS複合航法装置
【課題】GPS受信機を含む構成のGPS複合航法装置において、移動体の静止時における移動体の推定位置、推定速度、推定方位の変化を解消すると共に、静止から移動時における応答特性の良いGPS複合航法装置を提供することを目的とする。
【解決手段】移動体の静止を判定する静止判定部を設け、該静止判定部で静止状態と判定されたとき、カルマン・フィルタの観測更新に用いる観測モデルを変更すると共に、更新による誤差共分散行列の変化分を補正することを特徴とする。
(もっと読む)
GPS複合航法装置
【課題】GPS受信機を含む構成のGPS複合航法装置において、GPS擬似距離或観測量及びドップラー周波数観測量との差に基づいて、GPS受信機出力の異常を検知するとき、GPS受信機出力の異常を正確に判定すると共に、GPS擬似距離或観測量及びドップラー周波数観測量の推定誤差に起因する異常判定時の異常継続を回避するGPS複合航法装置を提供することを目的とする。
【解決手段】GPS受信機出力の異常を検知したとき、異常期間を計数し、該計数値が予め決められた閾値以下ではGPS受信機出力を異常として扱い、前記閾値を超えた以後はGPS受信機出力を正常として扱うことによって、GPS受信機出力の異常を正確に判定することを特徴とする。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる誤差を適切に反映させた重み付け測位演算を行うこと。
【解決手段】本発明による移動体用測位装置は、移動体の停止中に取得される前記位相の観測値を用いて、移動体の停止中における衛星と移動体の間の擬似距離を、衛星毎に計測する擬似距離計測手段と、移動体の停止中における複数の時点で前記擬似距離計測手段により計測された擬似距離に基づいて、該計測された擬似距離の誤差を表わす指標値を、衛星毎に算出する誤差指標値算出手段と、前記誤差指標値算出手段により算出された衛星毎の誤差指標値に基づいて、衛星毎の重み付け係数を決定する重み係数決定手段と、移動体の移動中に取得される前記位相の観測値を用いて、前記重み係数決定手段により決定された衛星毎の重み付け係数を用いた重み付け測位演算により、移動中の移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 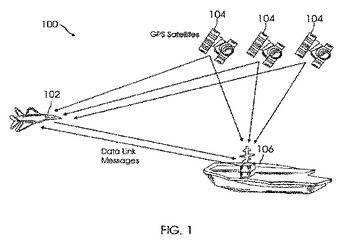 (もっと読む)
(もっと読む)
移動局の速度計測装置
【課題】サイクルスリップが発生しても、GPSによる速度計測ができない時間を少なくして移動局の走行速度を計測できる移動局の速度計測装置を提供する。
【解決手段】第1速度計測手段23は、測位手段22からのドプラー周波数Daに基づいて求められるドプラー速度と、加速度を積分して得られる積分速度との差に応じて最適な混合比で融合して移動局の走行速度V1を計測する。第2速度計測手段25は、測位手段22からの移動局の位置Dbに基づいてTD法により移動局の走行速度V2を計測する。切替制御手段24は、サイクルスリップが発生後、サイクルスリップからの回復の初期段階は第1速度計測手段23により上記走行速度V1を計測し、サイクルスリップが発生しないときは第2速度計測手段25により上記走行速度V2を計測するように切り替え制御を行う。この制御により、速度計測の空白期間が少なくなる。
(もっと読む)
121 - 140 / 203
[ Back to top ]