
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
101 - 120 / 203
車両位置姿勢推測装置
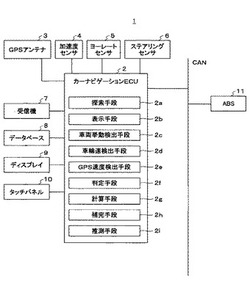
【課題】最終的な計算精度を高めることができる車両位置姿勢推測装置を提供すること。
【解決手段】本発明による車両位置姿勢推測装置1は、車両の加速度を検出する車両挙動検出手段2cと、車両の車輪の車輪速を検出する車輪速検出手段2dと、GPS速度を検出するGPS速度検出手段2eと、車輪のスリップ又はロックが発生しているか否かを判定する判定手段2fと、判定手段2fが車輪のスリップ又はロックが発生していないと判定する場合に、加速度と車輪速に基づいて、車速を計算する計算手段2gを備えるとともに、判定手段2fが車輪のスリップ又はロックが発生していると判定する場合に、計算手段2gが、加速度とGPS速度に基づいて車速を計算することを特徴とする。
(もっと読む)
衛星航法/推測航法統合測位装置

【課題】低価格で構成でき且つ位置・速度等の航法データの精度を高めた衛星航法/推測航法統合測位装置を構成する。
【解決手段】追尾処理部31は、GPS測位信号に基づいて、その捕捉処理、追尾処理、航法メッセージの復調処理を行う。GPS測位演算部32は擬似距離観測量やドップラー周波数観測量及びエフェメリスデータを基に位置・速度等を演算し、これらを出力判定部43と追尾処理部31へ与える。統合測位演算部42は擬似距離観測量やドップラー周波数観測量の他に、慣性センサの出力や地図情報又は地図位置と測位との差の情報等の外部支援情報に基づいて、位置・速度などを推定し、出力判定部43へ与える。出力判定部43はGPS測位演算部32の出力と統合測位演算部42の出力とを比較し、統合測位演算部42の出力データの信頼性判定や外部支援データの異常判定を行う。
(もっと読む)
移動デバイスを位置特定するための方法、および移動デバイスを位置特定するための装置
本発明は、移動通信の分野に関する。本発明は、ダウンリンク・プリアンブル高速検出DPFDによるWiMAX位置特定のための方法および装置を提供する。この方法は、移動ユーザ局MSSが、TDDモードで移動WiMAXによってすべて同期されているBSからのダウンリンク・プリアンブルを検出するステップと、異なるBSのプリアンブルのTDoAが、プリアンブル・ベースの同期検出によって獲得されるステップと、正確なロケーションが、従来のTDoAアルゴリズムを介して計算されるステップとを備える。本発明の実施形態は、アップリンク・レンジング・アシスタント・ダウンリンク・プリアンブル検出によって移動ユーザ機器の位置を測定することに関する新たな概念を説明する。移動WiMAXが、ITUによって3G標準として受け入れられ、広く定着するにつれ、WiMAXに基づく位置特定は、市場潜在力を有するサービスとなるであろう。 (もっと読む)
計時装置および計時装置の衛星信号受信方法
【課題】衛星信号を短時間で受信でき、消費電力も低減できるとともに、受信環境の影響を軽減できて受信に成功する確率を向上できる計時装置を提供すること。
【解決手段】GPS付き腕時計は、位置情報衛星を捕捉して衛星信号を受信する受信部と、受信した衛星信号に基づいて時刻情報を生成する時刻情報生成部と、時刻情報を表示する時刻表示部と、前記受信部を制御する受信制御部50とを備える。受信制御部50は、受信処理を行う前に受信環境を判定する判定部51と、1つの位置情報衛星を捕捉し、その位置情報衛星から送信される衛星信号に基づいて時刻情報を取得する一衛星サーチモードと、複数の位置情報衛星を捕捉し、それらのうちの1つの位置情報衛星から送信される衛星信号に基づいて時刻情報を取得する複数衛星サーチモードとを、判定部51の判定結果に基づいて選択するサーチモード選択部52を備える。
(もっと読む)
車載用ナビゲーション装置
【課題】車速パルスを用いずとも正確な車速を算出することによってGPS信号の受信が不可能な地点における自車位置を高精度に算出することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】車速(GPS受信不能期間の直前におけるGPS信号に基づいて算出された第1の車速a)と、映像速度(GPS受信不能期間の開始時における車載カメラの撮影映像に基づいて算出された映像速度b)との相関関係(速度比K)が、GPS受信不能期間においても維持されるとみなした上で、速度比KにGPS受信不能期間内における映像速度b’を乗じることによって、擬似的な第1の車速として第2の車速a’を算出し、この第2の車速a’を自律航法に用いる。
(もっと読む)
無線ロケーション・システムにおいてTDOAおよびFDOAを推定するための方法の改良
【課題】位置検出対象信号の存在を試験する周波数および時間期間を限定するために、到着時間差および/または到着周波数差を判定する方法に関する。
【解決手段】移動送信機の位置を検出する際に用いる方法は、相互相関値の集合を求めることを含み、各相互相関値には、対応するTDOAおよび/またはFDOA推定値が関連付けられており、基準信号を協同信号と相関付けることによって求める(図5)。基準信号は、移動送信機が送信し第1アンテナにおいて受信した信号のコピーから成り、協同信号は、第2アンテナにおいて受信した同じ信号のコピーから成る。本方法は、更に、TDOAおよび/またはFDOA推定値の最尤範囲を決定し、次いでTDOAおよび/またはFDOA推定値の最尤範囲に対応する相互相関値の部分集合(図10)内において最適な相互相関値を特定することを含む。次に、最適な相互相関値に対応するTDOAおよび/またはFDOA値を用いて、移動送信機の位置を算出する。
(もっと読む)
測位方法
【課題】マルチパスの誤検出および未検出を低減しマルチパスの影響を受けない高精度な位置を表示する。
【解決手段】測位衛星が発信する軌道情報および時刻情報を受信するステップ(201)と、受信した時刻情報をもとに測位衛星と受信機との間の擬似距離を算出するステップ(206,207)と、受信した軌道情報および時刻情報をもとに前記測位衛星の位置を算出するステップと、算出された擬似距離および測位衛星の衛星位置をもとに受信機の現在位置を算出するステップと、受信機の予測位置を算出するステップと、受信機の予測位置および測位衛星の衛星位置をもとに擬似距離の予測量を算出するステップと、前記擬似距離と擬似距離の予測量の差分をもとに擬似距離の予測観測誤差を算出するステップ(208)と、前記予測観測誤差を予測観測誤差の標準偏差で除算した結果をもとにマルチパスの発生の有無を判断するステップ(209,210)を備えた。
(もっと読む)
ワイヤレス位置検出システムにおけるCMDA信号の到達時間検出
CDMAベースのワイヤレス通信システムと共に展開されたワイヤレス位置検出システム(WLS)において、到達時間差(TDOA)および混成測位方法において用いるためのマルチパス破損無線シグナリングを収集するために、位置測定ユニットを用いる。最小時間遅延のマルチパス成分を判定するWLSの能力を改善し、したがってCDMAベースのワイヤレス通信システムにおいてTDOA位置検出の精度を高めるために、信号処理技法を用いる。信号処理には、相互相関関数の先行サイドローブを低減するフィルタリング技法、および前縁発見手順が含まれる。 (もっと読む)
測位システム、端末装置、測位システムの制御方法、端末装置の制御方法、測位システムの制御プログラム及び端末装置の制御プログラム
【課題】GPS測位機能が組み込まれた端末装置をユーザの手に付けて歩行した場合、歩行に伴って手の位置が前後に振られるため、測位されたユーザの現在位置が微妙にずれることになる。
【解決手段】ユーザの歩行に伴い端末装置20が遥動状態にあるとき、遥動状態を検出した加速度センサ26aからの出力信号に基づいて、ユーザの腕が振られる基準周期時間29aを算出する。そして、端末装置20が遥動状態にあるときには、予め設定されている設定測位間隔29bを基に、基準周期時間29aの整数倍の時間の間隔で測位処理を行う。
(もっと読む)
測位装置
【課題】時計誤差の補正用の送信局を用いず自機内の独自の処理によりセンサ間の時計誤差の補正を可能にする測位装置を得ることを目的とする。
【解決手段】複数のセンサで複数回受信した、目標が放射または反射した電波、音波または光波の到来時間とドップラ周波数に基づいて、それぞれセンサ間の受信波の到来時間差とドップラ周波数差を算出する差分算出手段と、上記算出された到来時間差に基づいた、かつセンサ間の時計誤差の補正を加えた目標の位置を算出する方程式と、上記算出されたドップラ周波数差に基づいた目標の位置と速度を算出する方程式を連立させて目標の位置と速度およびセンサ間の時計誤差を算出する測位手段を備えたものである。
(もっと読む)
航行データ収集および信号の後処理
【課題】
航行衛星システムに関し、特に位置決定がリアルタイムで行う必要がなく、バッチ処理ができる場合における、データ収集及び信号処理は時間及び場所をそれぞれ単独に行う、位置決定デバイスを提供すること。
【解決手段】
航行衛星信号のデータ収集のための電波受信機と、前記信号のサンプルを記憶するメモリと、電波受信機がオリジナル航行衛星信号を収集した後にオリジナル位置を抽出するためにメモリのあるデータをリプレイおよび信号処理する後処理機とを含む航行システム
(もっと読む)
予測及びリアルタイム支援型GPSシステムのための分散軌道モデル及び伝播方法
予測GPSサーバ(PGPSサーバ)と、高精度軌道予測ソース(軌道サーバ)と、PGPSサーバにリアルタイムGPS又はGNSS支援データを供給するグローバル基準ネットワーク(GRNサーバ)と、GPS又はAGPSチップセットを装備したデバイス上で実行される予測GPSクライアント(PGPSクライアント)とを含む予測GPS又はGNSSシステムにおいて使用される分散型軌道及び伝播方法。PGPSクライアントからの要求に応答して、PGPSサーバは、現在の衛星軌道状態ベクトル及び軌道伝播モデル係数から成る初期シードデータセットを生成して広める。シードデータセットは、PGPSクライアントが望ましい将来時間まで局所的に衛星軌道を予測及び伝播させることを可能にする。予測支援は、次に、初回測位時間を加速し、位置解決法計算を最適化し、デバイス上に存在するか又はデバイスに結合したGPSチップの感度を改善する。 (もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理の速度補正処理で用いる測定誤差を適切に設定すること。
【解決手段】予め規定された3つの捕捉モードのうち、選択的に決定された捕捉モードでGPS衛星信号を捕捉する捕捉処理が実行されて、携帯型電話機1の位置及び速度を成分とする状態ベクトルの予測処理が実行される。また、各捕捉衛星毎に当該捕捉衛星からの受信信号周波数の実測値と予測値との差を観測値として状態ベクトルの速度成分を補正する速度補正処理と、当該捕捉衛星と測位装置間の距離を示す距離相当値の実測値と予測値との差を観測値として状態ベクトルの位置成分を補正する位置補正処理とが実行される。その速度補正処理では、捕捉衛星信号の信号強度に基づいて当該捕捉衛星についての当該速度補正処理で用いる測定誤差の初期値を設定する設定方法が、捕捉モードに応じて切り替えて設定される。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響の有無を検出し、マルチパスの影響がある場合にはその影響を低減し、測定精度を向上させること。
【解決手段】複数のGNSS衛星から送信される測位信号に基づいて位置を算出するGNSS受信装置に、測位信号に基づいて求められた擬似距離の時間特性に基づいて、該測位信号がマルチパスの影響を受けて受信されたか否かを判断するマルチパス判断手段と、測位信号がマルチパスの影響を受けて受信されたと判断された場合に、擬似距離の時間特性に基づいて、直接波の位相と反射波の位相とが等しくなるゼロ点を求める位相差ゼロ点算出手段と、測位信号に基づいて求められたドップラー周波数の積算値の時間特性と、位相ゼロ点算出手段により求められたゼロ点に基づいて、擬似距離を修正する擬似距離修正手段と、修正された擬似距離に基づいて位置を求める測位演算手段とを備えることにより達成される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位処理の切り替えによる測位精度の低下を防止すること。
【解決手段】複数のGPS衛星から発信されているGPS衛星信号を受信して最小二乗法
を用いたLS測位処理を行って現在位置が測位される。そして、LS測位処理の結果が、
測位処理を移行する条件として予め定められた測位移行条件を満たすか否かが判定され、
満たすと判定された場合に、LS測位処理を停止させ、複数のGPS衛星から発信されて
いるGPS衛星信号を受信してカルマンフィルタを用いたKF測位処理をが行われて、現
在位置が測位される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位位置の位置飛びを考慮して、適切な位置出力を行うこと。
【解決手段】GPS衛星から発信されているGPS衛星信号に基づいて携帯型電話機1の
現在位置及び移動速度ベクトルが間欠的に計測される。また、今回測位位置を位置飛びと
判定しない認容位置領域が計測結果に基づいて設定され、認容位置領域内に今回測位位置
が位置するか否かによって位置飛びが判定される。そして、位置飛びと判定されなかった
場合に、従前の計測結果から算出した予想位置を用いて今回測位位置を補正する補正処理
が行われ、今回出力位置が決定されて出力される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて、当該G
PS衛星信号のコード位相が測定される。そして、捕捉したGPS衛星信号の信号強度に
基づいて、当該捕捉衛星についての状態ベクトル「X」の位置補正処理で用いる測定誤差
としての位置R値の初期値が設定され、当該初期値が設定された位置R値が、当該捕捉衛
星からのGPS衛星信号を捕捉処理した際の捕捉時諸量に基づいて変更される。
(もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを生成するために位置決定データを処理する方法であり、少なくとも1つのナビゲーションできる区域に、一般的には各ナビゲーションできる区域に、関連付けられた速度データを、該速度データが該速度データと関連付けられたナビゲーションできる区域のパラメータに従って分類され得る複数の分類を持つクラシフィケーションの1つの分類に分類する工程と、クラシフィケーションの各分類ごとの分類平均を生成する工程と、関連付けられた速度データが存在するかを確認するために、少なくともいくつかのナビゲーションできる区域を、一般的には各ナビゲーションできる区域を、評価する工程と、あるナビゲーションできる区域に関連付けられた速度データが存在しない場合、処理中のナビゲーションできる区域のパラメータに従って、前記分類平均を該処理中のナビゲーションできる区域の速度データとして用いる工程と、を含むことを特徴とする方法。 (もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、(ii)位置決定データを処理して、位置決定データから速度データを生成する工程と、(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に速度データを関連付けるために、マップデータを速度データでアップデートする工程と、を含み、生成された速度データは、速度データを生成する位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。 (もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて距離相当
値が測定される。また、捕捉したGPS衛星信号の信号強度に基づいて当該捕捉衛星につ
いての位置補正処理で用いる位置R値の初期値が設定されるが、当該捕捉衛星の観測値「
Z」が、GPS衛星からのGPS衛星信号の受信環境に基づいて設定された適否判定条件
により不適と判定される場合は、位置補正処理で用いる位置R値が初期値より大きな値に
設定される。
(もっと読む)
101 - 120 / 203
[ Back to top ]