
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
61 - 80 / 203
位置算出方法及び位置算出装置

【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
無線通信システムにおける環境評価

無線通信システムを取り巻き、送信信号を変曲させる少なくとも一つのインフレクタを含む環境を評価する方法及びシステムが記載される。観測発生装置(300)は、送信機から受信機へ無線通信チャネルを介して送信した入力信号を受信し、また受信機、送信機及びインフレクタの少なくとも一つに関連するシステム状態情報を受信する。観測プロセッサ(302)は、観測発生装置(300)からの観測(303)を使用して、受信した入力信号及びシステム状態情報に基づいてインフレクタの少なくとも一つの特性を評価する。 (もっと読む)
行動推定装置、行動推定方法、及び行動推定プログラム
【課題】位置情報の精度を低下させることなく携帯端末のバッテリー消費を抑える。
【解決手段】第1の時間間隔で測定される位置情報を前記第1の時間間隔より長い時間間隔である第2の時間間隔で一括して取得するデータ通信装置105と、データ通信装置105により取得された位置情報を蓄積する位置情報蓄積部106と、位置情報蓄積部106に蓄積された一定期間の位置情報を解析することにより速度ベクトルを生成する速度ベクトル生成部107と、速度ベクトル生成部107により生成された速度ベクトル付きの地図を蓄積する地図蓄積部108と、データ通信装置105により取得された最新の位置情報と地図蓄積部108に蓄積された地図とに基づいて、次にデータ通信装置105により位置情報が取得されるまでの間の位置を前記第2の時間間隔よりも短い時間間隔で推定する推定部109とを備える。
(もっと読む)
変換係数導出装置および変換係数導出方法
【課題】状況に応じた距離変換係数を導出する技術を提供する。
【解決手段】前処理部40は、取得した測位データに含まれたGPS速度を所定の期間にわたって逐次平均するとともに、取得したパルスの数を当該期間にわたって逐次計測する。仮変換係数導出部42は、平均したGPS速度と、計測したパルスの数とをもとに、パルスの数から移動距離への変換係数に対する仮係数を逐次導出する。フィルタ処理部46は、導出した仮係数を逐次統計処理する。補正制御部44は、統計処理した仮係数、あるいは導出した仮係数を変換係数として出力する。
(もっと読む)
ネットワーク自律ワイヤレス位置検出システム
ローカル・ワイヤレス通信ネットワークへの相互接続なく、このネットワークの混乱を最小に抑えて、移動体デバイス(例えば、セル・フォン)の正確な位置検出を可能にするように、ネットワーク自律ワイヤレス位置検出システム(NAWLS)が設計されている。分散型無線ネットワーク・ワーク・モニタ(RNM)およびマネージド・ネットワーク・エミュレータ(NE)を用いて、移動体デバイスをサンプリングし、取得し、または捕獲する。一旦RNMまたはNEによってトリガされると、無制限ワイヤレス位置検出システム(U−WLS)を用いて、正確な位置を計算する。U−WLSは、移動体受信機サイトを含み、その各々が、自己位置検出が可能であり、NAWLSの他のコンポーネントと情報を交換し、移動体デバイスからの信号を受信または交換する。U−WLSは、配備された選択肢に応じて、種々のネットワークに基づくおよびハンドセットに基づくワイヤレス位置検出技法を利用する。加えて、NAWLSは、U−WLS、NE、およびRNMを相互接続するデータ・リンクも含む。 (もっと読む)
信号処理装置、情報処理装置、信号処理方法、データ表示方法、及びプログラム
【課題】GPSモジュールに流れる信号の観測又は解析を効率的に行うことを可能とすること。
【解決手段】全地球測位システムの衛星から受信された信号の周波数を所定の中間周波数に変換することにより得られる中間周波数信号の拡散符号の同期を捕捉する同期捕捉部と、前記同期捕捉部により同期を捕捉された前記中間周波数信号に含まれるメッセージを復調する復調部と、前記復調部により復調された前記メッセージに基づいて装置の位置若しくは速度又は時刻のうちの少なくとも1つを測定した結果を表す一次信号を所定の信号線に出力する測定部と、前記中間周波数信号又は当該中間周波数信号から生成される信号のうちの少なくとも1つを含む二次信号に所定のヘッダを付与して前記所定の信号線に出力する二次信号出力部と、を備える信号処理装置が提供される。
(もっと読む)
移動体用測位装置
【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
受信機の位置決定
開示される方法及びシステムを使用してユーザ装置の位置を決定する。ユーザ装置は、データ信号及び/又は搬送波信号を、周回している宇宙船から受信することができる。これらのデータ信号は、ユーザ装置の測位計算及び/又は追尾維持に使用することができる。開示される方法及びシステムは、ユーザ装置の時間バイアス及び周波数バイアスの問題を解決することができる。追尾維持を行なう場合、カルマンフィルタ状態推定器を拡張してユーザ装置の速度を推定することができる。 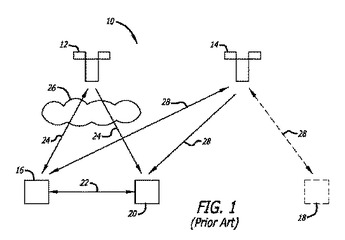 (もっと読む)
(もっと読む)
位置推定装置及び位置推定方法
【課題】 測位機能を有する移動通信端末の、測位の繰り返しの際の電力消費を低減させる。
【解決手段】 測位サーバ10は、移動通信端末20との間で情報を送受信する送受信部12と、受信された情報に基づいて、移動通信端末20の近傍に位置する別の移動通信端末20を示す近傍端末情報を取得する近傍端末情報取得部13と、近傍端末情報によって示される別の移動通信端末20についての、受信された位置情報に基づいて、位置の推定対象となる移動通信端末20の位置を算出する位置算出部15とを備える。
(もっと読む)
移動体用測位装置
【課題】より正確な移動体の速度ベクトルを出力することが可能な移動体用測位装置を提供すること。
【解決手段】衛星電波を用いて移動体の位置を算出する位置演算手段と、衛星電波又は慣性航法により前記移動体の速度ベクトルを算出する速度演算手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、前記速度ベクトル算出手段により算出された速度ベクトルを、前記リンクのうち移動体が存すると推定されるリンクに投影した投影速度ベクトルを出力する投影手段と、前記投影手段により出力される投影速度ベクトルの採用の可否を判定する投影可否判定手段と、を備え、該投影可否判定手段により前記投影速度ベクトルを採用すべきと判定された場合に、前記投影速度ベクトルを前記移動体の速度ベクトルとして出力することを特徴とする、移動体用測位装置。
(もっと読む)
初期位置決定方法、位置算出方法及び位置算出装置
【課題】位置算出演算をする際の初期位置を決定するための新たな手法を提案すること。
【解決手段】地球上に、携帯型電話機2の所在地を含むと想定される位置範囲であって、300km四方以上の複数のフレームを設定する。そして、設定した複数のフレームそれぞれについて、当該フレームの代表グリッドで、センサー部により検出された移動速度及び移動方向で移動していると仮定した場合のGPS衛星信号の想定受信周波数を算出する。そして、GPS衛星信号を受信した際の観測受信周波数と想定受信周波数との差に基づいて、複数のフレームの中から初期位置とする位置を含む処理対象フレームを抽出する。そして、GPS衛星信号を用いて、抽出された処理対象フレーム内に初期位置とする位置を決定する。
(もっと読む)
トンネル内取締機対応の道路交通情報受信装置
【課題】トンネル内の取締機に対して高価なジャイロセンサ等のシステムを用いることなく安価な加速度センサだけで対応できて交通事故を防止に寄与する道路交通情報受信装置を提供する。
【解決手段】GPSモジュールから位置および速度データを受信し位置登録データメモリから現在位置に対応した道路交通情報を得て制御を行うCPUと、前記道路交通情報を聴覚的または視覚的に運転者に報知する報知部と、を備え、さらに位置登録データメモリの中にトンネル情報を登録し、加速度センサを備え、GPSモジュールから受信しなくなったトンネルでは、トンネル情報と加速度センサからのデータをハイパス・フィルタを介して用いて自車の位置と車速を算出し、トンネル内の取締機の警告をするようにした。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルター処理を用いた位置算出の正確性を向上させること。
【解決手段】携帯型電話機1は、移動体が等速移動状態にあることを表す第1等速度KFモデル及び第2等速度KFモデルの2種類の等速度KFモデルを用いたインタラクティブミキシングモデル(IMM)による位置算出処理を行って、出力位置を決定する。第1等速度KFモデル及び第2等速度KFモデルは、KFにおけるパラメーターの一種である状態遷移行列は同じであるが、誤差パラメーターの一種であるシステムノイズが異なる値に設定されたモデルである。
(もっと読む)
ナビゲーション装置及び方法
ナビゲーション装置は全地球航法衛星システム(GNSS)の衛星からGNSS信号ブロードキャストを受信するためのGNSS受信器と、ユーザ入力の位置情報、時間情報、又はワイヤレスネットワークのサービスエリア情報を受信するための受信器と、処理装置とを備える。処理装置は、ユーザ入力の位置情報、時間情報、又はワイヤレスネットワークのサービスエリア情報からシード位置を判定し、該判定したシード位置に基づいてGNSS衛星を取得するためにGNSS受信器を制御する。 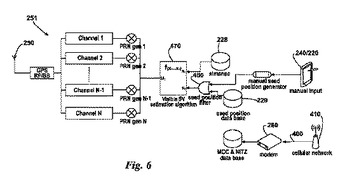 (もっと読む)
(もっと読む)
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
GPSを利用した測位方法
【課題】異常な測位方位を検出し、該測位方位を無効とすることで、最終的な測位結果の精度を向上させることが可能な測位方法を提供することを目的とする。
【解決手段】複数の衛星から送信されるGPS(Global Positioning System)信号を用いて測位を行う測位方法であって、受信したGPS信号から、受信機の速度および方位を測位する速度測位ステップと、速度測位ステップによる測位方位が、測位に使用されなくなった衛星の方位に対して直交している場合に、該測位方位を無効とする無効ステップと、を含む方法。
(もっと読む)
衛星航法受信機を制御するためのシステムおよび方法
【課題】処理装置およびパワーマネージメントインターフェースを含む複数の動作状態を有する衛星航法受信機を提供すること。
【解決手段】処理装置は、複数の衛星信号に基づいて、衛星航法受信機を位置付けるように動作可能であり、衛星航法受信機の速度に基づいて、それぞれ動作状態の複数の時間期間を設定するように動作可能である。処理装置と結合されているパワーマネージメントインターフェースは、その時間期間により、動作状態の間で衛星航法受信機を切り替えるように動作可能である。
(もっと読む)
ドップラー効果を補正する装置を備える受信機
デジタル係数セットを含む時間デジタルフィルタの使用に基づくチャネル推定及び補正手段、並びにキャリア間干渉除去手段を有するOFDMデジタル通信受信機が提供される。受信機は、各々が所定のデジタル係数セット及びエントリポインタに対応するn個のルックアップテーブルLUT(n)を含む。  (もっと読む)
(もっと読む)
方位決定装置及び方法及びプログラム、位置算出装置及び方法及びプログラム、並びに、電子機器
【課題】GPS電波の受信状況が良好でない場合であっても、方位を高精度に決定することが可能な方位決定装置等を提供する。
【解決手段】GPS衛星からの電波を受信するGPSアンテナ11a、11bと、位置を算出するGPSユニット12a、12bと、地磁気に基づいて第1の方位を検出する電子コンパス13と、GPSユニット12a、12bによって算出された位置に基づいて第2の方位を算出し、第1の方位と第2の方位とを比較し、第1の方位と第2の方位とが一致する場合には、第1の方位及び/又は第2の方位を現在の方位として決定し、第1の方位と第2の方位とが不一致の場合には、第1の方位を現在の方位として決定するホストCPU14と、を含む。
(もっと読む)
測位装置、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、コンピュータプログラム及び測位方法を提供する。
【解決手段】衛星用通信部12は、各衛星との擬似距離を測定するコード位相測定部121、各衛星の搬送波の位相を測定する搬送波位相測定部122、各衛星の搬送波の周波数を測定する搬送波周波数測定部123などを備えている。処理部11は、各衛星の搬送波の周波数を測定してドップラーシフトを求めることにより、測位対象100の速度ベクトルを算出する。処理部11は、測位前の測位対象100の位置をAとし、速度ベクトルをVとし、速度ベクトル算出の時間間隔をTとすると、解の探索範囲の中心Bを、B=A+T・Vにより求め、解の探索範囲を制限してアンビギュイティを決定する。
(もっと読む)
61 - 80 / 203
[ Back to top ]