
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
141 - 160 / 203
移動体位置測位装置

【課題】マルチパス発生中におけるマルチパス終了判定の誤判定を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星10からの信号を受信する受信手段20Aと、移動体の速度ベクトルVを算出する速度ベクトル算出手段60Aと、移動体の位置を測位する測位演算手段40と、測位結果の履歴に基づいて移動体の移動量を表す変位ベクトルMを算出する変位ベクトル算出手段50と、速度ベクトルVと変位ベクトルMとのなす角度を評価値として算出する角度算出手段と、評価値に基づいて測位演算手段の測位の異常を判定する異常判定手段72とを備え、異常判定手段72は、前記評価値が所定閾値Th1以上となった場合に、測位に異常がある旨の異常判定をし、該異常判定時から前記評価値が所定閾値Th3未満となる間の時間又は移動体の移動距離が、所定時間Th5又は所定距離を越えた場合には、前記異常判定を解除し、所定時間又は所定距離を越えない場合には、前記異常判定を維持することを特徴とする。
(もっと読む)
自車位置算出装置

【課題】 車速パルス信号を利用することができない車両であっても自車位置を算出可能な「自車位置算出装置」を提供する。
【解決手段】 自車位置算出装置30は、GPS衛星の測位からGPS速度等の情報を生成するGPS測位情報作成部50と、車両34からの車速パルス信号が入力されず、かつGPS測位情報生成部50から得られたGPS速度が変化したとき、車速パルス信号を利用することができないと判定する判定部52と、車速パルス信号を利用することができないと判定されたとき、GPS速度に基づき擬似車速パルス信号を生成する擬似車速パルス信号生成部54と、擬似車速パルス信号に基づき自車位置を算出する自車位置算出処理部42とを含んで構成される。
(もっと読む)
完全性監視付きハイブリッドINS/GNSSシステムおよび完全性監視方法
本発明は、慣性装置と衛星測位受信機とのハイブリッド化システムから得られる位置および速度情報の完全性の監視に関する。本発明は、より詳細には、閉ループにおいてハイブリッド化したINS/GNSSシステム(「慣性航法システム」および「全地球的航法衛星システム」を表す)として当業者に知られる航法装置に関する。 (もっと読む)
ナビゲーション・システムおよびナビゲーション方法
【目的】高精度を達成するためにGPS測定結果に加えて車両走行状態を利用する「ナビゲーション・システムおよびナビゲーション方法」を提供する。
【構成】MEMS(超小型電子・機械式システム、Micro Electro Mechanical System)と呼ばれる安価で低精度の慣性センサーを使用する慣性航法システム(INS)とGPSを複合したナビゲーション・システムにおいて、(1)慣性センサーから得られる加速度と角速度を用いて予め複数の車両走行状態を定義し、(2)INSに搭載された慣性センサーから車両の各座標軸における加速度と角速度を受信し、(3)該加速度と角速度を評価することで車両の現在の走行状態を判別し、(4)判別された車両走行状態に応じた値を求め、該値を測定値としてINSとGPSを複合するカルマン・フィルタに送り、(5)車両走行状態を考慮してカルマン・フィルタ処理を行って車両の位置、速度及び姿勢の最適な推定値を得る。
(もっと読む)
統合型移動端末ナビゲーション
セルラ通信ネットワークの1以上の同期していない地上送信源102〜105からの信号を受信するための送信源受信機204と、衛星測位システムの衛星107〜110からの信号を受信するための衛星測位受信機200とを備えた移動端末100を含むナビゲーションシステムが提供される。端末100はクロック208も含む。プロセッサ209は、各値が受信機200、204によって生成された測定値を表している斯かる値のリストと、端末クロックのバイアスとを有する測定値ベクトルを取得する働きをする。プロセッサ209は、動的ナビゲーションソリューションを得るために、システムの現状態を表す状態ベクトルを、以前に決定された状態ベクトルと、測定値ベクトルと、動的モデルとを使って計算する。状態ベクトルは、その成分として少なくとも、(a)端末100の1次元以上の位置情報と、(b)同期していない地上送信源102〜105に付随するクロックの所与の時間に関するバイアスの表現と、(c)端末クロック208のバイアスと、(d)(a)乃至(c)の成分に関連する誤差を示すクォリティ指標と、(e)(a)乃至(c)の成分の他の成分に対する依存度を示す相関指標とを含む。 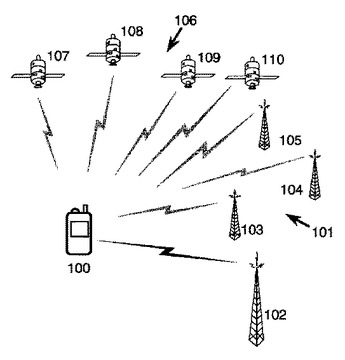 (もっと読む)
(もっと読む)
軌道推定方法とその装置
【課題】既設置の発信局から移動体に到達する電波を用いることにより新規に送受信機を必要としない軌道推定方法とその装置を提供する。
【解決手段】軌道推定方法は、複数の送信局から複数の移動体に電波を同時に送信し、2局の受信局において、上記移動体に搭載された中継器により中継送信された電波を受信し、上記受信した電波から上記移動体に係わる到来時間の差およびドップラー周波数の差を検出し、上記複数の移動体の軌道を示す未知変数以上の到来時間の差およびドップラー周波数の差を得ることのできる局数の送信局が存在するとき、得られた到来時間の差およびドップラー周波数の差から直接上記移動体の軌道を推定する。
(もっと読む)
ナビゲーション装置、停止検出方法及び停止検出プログラム
【課題】本発明は、車両100が停止しているときに、車両100が停止していることを確実に検出することができる。
【解決手段】本発明は、GPS信号に基づく位置信号PSからGPS速度を算出し、当該GPS速度から車両100が停止していると認識した際に、車両100に作用する加速度を表す横方向加速度信号SBを検出すると共に、当該横方向加速度信号SBの分散値を車両100の振動を表す横方向加速度分散値DPとして算出し、この横方向加速度分散値DPの平均値を第1の閾値である停止判定閾値SDとして設定することにより、当該横方向加速度分散値DPに基づいて停止判定閾値SDを設定するようにする。
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
搬送波位相式測位装置
【課題】測位側が移動している場合であっても高精度な測位を実現できる搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で衛星信号を受信して取得する衛星データに基づいて移動局の位置を測位する搬送波位相式測位装置34であって、移動局30及び既知点20で受信した衛星信号の搬送波位相の積算値の1重又は2重位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアスの1重又は2重位相差とを状態変数とするシステムモデルに、移動局の移動履歴から該移動局の現時刻の状態を予測する移動体モデルを導入して、複数エポックでの衛星データに基づいて前記状態変数を推定して測位を行う。
(もっと読む)
WLAN測位装置の位置を推定するためにWLAN対応アクセス・ポイントから情報を収集するシステム及び方法
WLAN測位装置の位置を推定するためにWLAN対応アクセス・ポイントから情報を収集するシステム及び方法。この装置は、それ自体の位置を推定し、WLAN無線モジュールと、前記受信されたWLANから識別情報を抽出するための抽出ロジックと、WLANベースの測位システムと協力するロジックとを含む。その無線は受信専用装置であるか或いは限定された送信能力(例えば、プローブ要求だけ)を有するものであり得る。或る抽出ロジックは、前記装置以外のWLAN対応装置に向けられたWLAN信号から情報を抽出する。他の抽出ロジックは、複数の、類似するけれども同一ではないWLANパケットのヘッダを組み合わせるダイバーシティ及び組み合わせロジックを含む。或る実施態様はキャッシュを含む。他は、前記装置のドップラー周波数の推定を改善するために充分に長いWLANパケットについて複数の受信信号強度インジケータ(RSSI)値を測定する。更に他のものはWLAN APのアクティブ・スキャニング及びパッシブ・スキャニングのためのフェーズを含む。 (もっと読む)
WLAN測位システムのアクセスポイントの分類方法及びシステム
【課題】
WLANアクセスポイントの特性推定品質に従ってWLANアクセスポイントを分類する方法およびシステムを提供する。
【解決手段】
WLANアクセスポイントの特性推定品質に従ってWLANアクセスポイントを分類する方法およびシステムを提供する。この分類を使用して基準データベースをスケールし、アクセスポイント特性の期待推定誤差を定量化することができる。WLANアクセスポイントは、WLAN測位システムにおけるユーザの位置、移動速度、および移動方向の推定精度に対するWLANアクセスポイントの影響に基づいて分類される。Wi−Fiアクセスポイントの特性推定品質を割り出す方法は、Wi−Fiアクセスポイントによって送信されるWi−Fi信号のいくつかの受信信号強度(RSS)サンプルをWi−Fi対応スキャン装置で受信し、測定することを含む。そのいくつかのRSSサンプルを測定しているときにWi−Fi対応スキャン装置による総移動距離が推定され、その推定値を用いてWi−Fiアクセスポイントの特性推定品質が推定される。
(もっと読む)
衛星の天体暦誤差
衛星の天体暦誤差を補償または補正する方法は、様々な地理的位置における較正送信機(42a〜42d)から2機の衛星(34、46)を介して受信される信号レプリカの到達時間差(TDOA)および到達周波数差(FDOA)を測定するステップを含む。TDOAおよびFDOAの測定値に最良適合するTDOAおよびFDOAの推定値を与える天体暦変化を計算するために、位置ベクトルと速度ベクトルからなる初期衛星天体暦が使用される。これは、初期衛星天体暦の誤差を補償または補正するために必要な推定変化を提供する。この方法は、大きい天体暦変化を処理するために反復されてもよい。すなわち、1回の反復で得られる変化は、次の反復において新たな初期天体暦として使用される天体暦を補正するために使用されてもよい。この方法は、1機または2機の衛星の天体暦誤差を補正するために使用されてもよく、そうであれば、さらに多くの較正送信機EphemCal 1〜EphemCal 10が使用されてもよい。  (もっと読む)
(もっと読む)
GPS測位による位置算出装置
【課題】 GPS測位環境や移動体の高さ方向の動きを監視して、3次元測位を判定するためのしきい値を動的に決定する「GPS測位による位置算出装置」を提供する。
【解決手段】 GPS測位を利用して移動体の位置を算出する位置算出方法は、GPS測位環境の良否を判定するステップと(S101)、測位環境が悪いと判定されたとき、しきい値を下げるステップと(S102)、測位環境が良好と判定された場合に移動体の高さ変動があるか否かを判定するステップ(S103)と、高さ変動があると判定されたとき、しきい値を上げるステップと(S104)を含み、PDOP値がしきい値より大きい場合には2次元測位を行い、PDOP値がしきい値以下の場合には3次元測位を行う。
(もっと読む)
測位装置及び測位方法
【課題】衛星電波を利用した受信機の速度の算出精度を向上させる。
【解決手段】衛星電波を利用した位置算出に用いた衛星群を、アンカーセットASとし(ステップS61)、このアンカーセットASとこれに含まれない非アンカー衛星NSVaとからなる組み合わせの異なる拡張セットTSを生成し、速度の算出精度が最良の拡張セットTSを特定する(ステップS62)。アンカーセットASの何れかの衛星を用いて組み合わせの異なる排他セットRSを生成し、速度の算出精度が最良の排他セットRSを特定する(ステップS63)。特定した最良の拡張セット及び最良の排他セットのうち、その速度の算出精度がより良い方を速度算出用セットとし、この速度算出用セットを構成する衛星の周波数精度に応じて重み付けを行い、これに基づき衛星電波受信機1の速度演算を行う(ステップS64、S65)。
(もっと読む)
情報処理装置及び通信システム及び移動体誘導方法及びプログラム
【課題】無人航空機を自律的に誘導・回収する装置を得る。
【解決手段】GPS衛星15からの測位信号は、GPSアンテナ6とGPSアンテナ7でほぼ同時に受信される。気球3上のGPS受信部10から得られる擬似距離データ及び搬送波位相データは、送信部12により送信され、機体1上の受信部11によって受信される。相対航法計算部13は、受信部11により受信された気球3における擬似距離データ及び搬送波位相データとGPS受信部9から得られる機体1における擬似距離データ及び搬送波位相データを併せて相対航法演算を行い、気球3に対する機体1の相対位置及び相対速度を算出する。相対位置及び相対速度のデータは、誘導制御計算部14に送られ、この誘導制御計算部14によってケーブル2へ機体1を衝突させるための誘導制御量算出が行われる。誘導制御計算部14によって誘導された機体1はケーブル2へ衝突することで減速し、回収される。
(もっと読む)
簡易走行路測定システム
【課題】簡易な手法で手軽に軌道の検測を行うことができる簡易走行路測定システムを提供する。
【解決手段】走行路測定システム1は、測定時に車両に搭載される衛星からの電波を受信して前記車両の速度情報を出力するGPS受信機10と、車両の動揺情報を出力する動揺センサ20、各種演算を行うPC30を備える。PC30は、速度情報及び動揺情報を受信して、時間軸上の前記動揺情報を時間軸・距離軸変換し、距離軸上にサンプリングされた動揺情報を算出する。
(もっと読む)
車載用走行距離計測装置
【課題】構造が簡単で、装置の製造コストを低く抑えることができ、計測誤差を最小限に留めることのできる車載用走行距離計測装置を提供する。
【解決手段】GPS衛星からの電波を受信し、車両の瞬間速度を算出するGPS受信部2と、GPS受信部で算出した車両の瞬間速度を所定の時間間隔毎に記録する記録部4と、記録部が記録した瞬間速度と所定の時間とに基づいて、車両の走行距離を算出する距離演算部(制御部3)とを備える車載用走行距離計測装置1。GPS衛星からの電波を利用して算出した車両の瞬間速度を用い、GPS衛星から電波が得られる時間間隔との積によって車両の走行距離を算出する。この装置1の機能を利用し、車両の平均燃費と、燃料タンクの容量を含む車両情報を入力部5から入力し、制御部によって走行可能距離を算出し、所定の値以下になると警報部6から警報を発することもできる。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、測位装置20の移動速度を算出する速度算出手段と、前回測位時からの経過時間が予め規定した許容時間範囲内であり、かつ、前回測位時の移動速度v0が予め規定した第1速度許容範囲内であり、かつ、現在の移動速度v1が予め規定した第2速度許容範囲内であるという静止状態条件βを満たすか否かを判断する静止状態判断手段と、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段等を有する。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号に基づいて、測位を行う測位装置20であって、前回測位時と現在測位時との間における測位装置20の移動量を特定する移動量特定手段と、移動量が予め規定した許容移動範囲内か否かを判断する移動量評価手段と、衛星信号に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、 移動量評価手段が、移動量が予め規定した許容移動範囲内であると判断した場合に、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段と、平均位置Q1を出力する位置出力手段と、を有する。
(もっと読む)
141 - 160 / 203
[ Back to top ]