
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
641 - 660 / 820
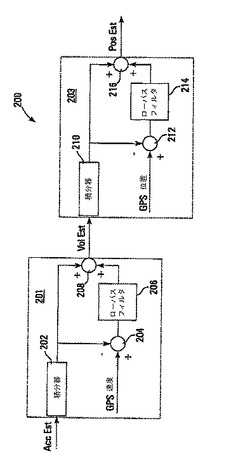
最小限のオンボード処理による航法システム
【課題】
位置評価を与える航法システムを提供する。
【解決手段】
1つの実施例において、方法は3次元各々で加速度評価を積分することを含む。各次元の速度雑音エラーを決定するために、各次元の積分加速度評価から、各次元のGPS速度を減算する。各次元で速度雑音エラーをフィルタする。各次元の速度評価を得るために、各次元の積分加速度評価にフィルタした速度雑音エラーを加算する。各次元の積分速度評価を決定するために、各次元の速度評価を積分する。各次元の位置雑音エラーを決定するために、各次元の積分速度評価から、各次元のGPS位置を減算する。各次元の位置雑音エラーをフィルタし、各次元のフィルタされた位置雑音エラーを積分速度評価へ加算して、各次元の位置評価を得る。
(もっと読む)
電離層遅延量推定システム

【課題】GNSSの誤差源である電離層遅延量を広域にわたり高精度に推定するシステムを提供する。
【解決手段】GNSS衛星1から送信されるデータを観測する観測局を地上局2に限らず海上に対しても海上局3を設置し、各地上局2および海上局3では、GNSS信号を受信すると、ジオメトリー・フリー信号および搬送波バイアス推定値を生成し、これらの信号を中央局6に高速通信回線4またはデータ中継衛星5を経由して送信し、中央局6では、これらのデータに基づいて電離層遅延量をリアルタイムで推定し、ユーザUに送信する。
(もっと読む)
移動個体管理システム
【目的】 公共移動通信情報網が通信不可能な地域に所在する鳥獣等の野生動物、人、車両等の基本的に移動する移動個体をリアルタイムで所在を確認及び管理するとともに、その動態を管理し、さらにそれらの行動管理を行うとともに移動個体が関係する地域生活の安全管理等に必要な情報管理を行うものである。
【構成】 1又は複数の行政区域を含む地域Aに所在する移動個体01の行動の管理と、この管理により地域Aの安全等を図るシステムであって、地域Aに所在する移動個体01に装着される無線情報端末1と、端末1から発信される時間、位置情報等を含む移動個体情報信号10を受信し、管理するデータ管理装置2と、移動個体情報信号を通信する通信手段からなり、データ管理装置2は移動個体01の移動に基づく端末1の行動管理、地域Aの安全管理等を目的とする1又は複数の管理地域を選定しこの選定された管理地域の安全等を管理する。
(もっと読む)
ナビゲーション装置
【課題】車両の現在位置が正しい道路上に表示されるようにすることにある。
【解決手段】現在位置測定部12がデッドレコニング処理によって算出した車両の現在位置および進行方位が採用し続けられる地域(例えば立体駐車場)に車両が進入した場合、マップマッチ候補道路検出部17は、前記移動体が該地域から脱出した場合に走行する可能性の高い道路の道路情報をマップマッチ候補道路18に登録する。移動体が該地域から脱出した後、信頼度決定部13から出力される現在位置および進行方位のデータを選択部14が選択する前に、マップマッチ処理を行う際には、マップマッチ候補道路18に登録されている道路情報を用いる。
(もっと読む)
歩行者移動支援装置
【課題】 外出中の徘徊癖のある歩行者等の位置などを常時検出し、走行中の自動車等に報知する歩行者移動支援装置を提供する。
【解決手段】 携帯送信機100から常時発信する歩行者のID情報を、複数箇所に設けた中継局110によって受信して受信の方向角を判定し、ID情報と受信の方向角を本部120に送信する。本部120は受信の方向角を解析して歩行者の位置を特定する。本部は歩行者の位置情報を中継局を介して周囲に送信し、自動車等に搭載した歩行者認識装置150が位置情報を受信して音声等の形態で出力し、自動車の運転者などに歩行者を認識させる。また、本部は、歩行者の危険地区への接近など、移動中の安全性を解析し、位置情報に付加して送信する。
(もっと読む)
移動体のナビゲーション装置及び移動体の現在位置算出方法
【課題】 マルチパスの影響を排除することで、より高い精度で現在位置を検出することが可能な移動体のナビゲーション装置及び移動体の現在位置算出方法を提供する。
【解決手段】 ナビゲーション装置10を備える車両の現在位置算出方法として、車両の現在位置を検出するための自律航法センサ5と制御部17とからなる自律測位手段が新たに算出した自律測位データの誤差範囲を、新たな現在位置の予測エリアデータとして算出するステップと、車両の現在位置を検出するためのGPS受信部4が新たに算出したGPS測位データが、予測エリアデータに含まれるかどうかを判定するステップと、GPS測位データが予測エリアデータに含まれないと判定した場合に、自律測位データを利用して現在位置を示す現在位置データを新たに算出するステップとを有する。
(もっと読む)
相関及び微分相関の合成に基づく信号処理及び時間遅延測定
状態の不規則な系列を有する2値信号の2つのバージョンが、(i)一方の信号の遷移の時刻において他方の信号の平均時間導関数を表す第1の値と、(ii)2つの信号の相関値とを導出し、その後、第1の値と相関値とを合成することによって処理される。それらの信号間に導入される所与の相対的な遅延に対して、結果として合成された値は、導入された遅延によって、2つの信号の遷移が同時に発生するか否かを示す。その過程は、他の導入された遅延に対しても繰り返され、2つの信号間の遅延の量を求めることができる。 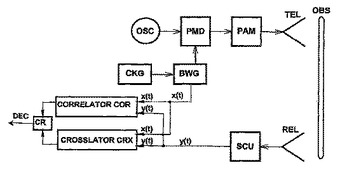 (もっと読む)
(もっと読む)
一機の低地球軌道衛星を利用する位置決定
【課題】一機の低地球軌道衛星を利用する位置決定。
【解決手段】低地球軌道衛星通信システム100におけるユーザターミナル(例えば、移動無線電話)の位置を決定するためのシステム及び方法。システムは、ユーザターミナル106、既知の位置及び既知の速度である少なくとも1つの衛星104、そして衛星104を介してユーザターミナル106と通信するためのゲートウェイ102(即ち、地上基地局)とを備える。方法は、レンジパラメータを決定する工程802及びレンジレートパラメータを決定する工程806を含む。レンジパラメータは、衛星とユーザターミナルとの間の距離を示す。レンジレートパラメータは、衛星とユーザターミナルとの間の相対的な半径方向速度を示す。そして、地球表面上におけるユーザターミナルの位置は、レンジパラメータと、レンジレートパラメータと、そして衛星の既知の位置及び既知の速度とに基づいて決定される810。
(もっと読む)
GPS装置及び携帯用電子機器
【課題】GPS受信装置51を装備する携帯局12のバッテリ36の電力を長持ちさせる。
【解決手段】バッテリ36の電力は、携帯用無線機21の電源スイッチ39、電源回路40及びスイッチ41を経てGPS受信装置51へ供給される。携帯用無線機21は、ユーザにより電源スイッチ39を入にされると、以後、切に戻されるまで、給電されて、作動状態を保持するの対し、GPS受信装置51への給電は、CPU42がスイッチ41をオン、オフをきり変えることにより、間欠的なものとなる。GPS受信装置51は、スイッチ41のオン期間に限り、給電されて、現在位置の測位を実施する。
(もっと読む)
衛星ナビゲーションのための方法及びシステム
【課題】衛星ナビゲーションのためのシステム及び方法を提供する。
【解決手段】一実施形態では、衛星ナビゲーション・システム用のモバイル・ユニットが開示される。このモバイル・ユニットは、衛星ビークルへ要求無線信号を送信する手段と、1又は複数の衛星ビークルの軌道座標を含む応答無線信号を受信する手段と、要求無線信号を送信する手段と応答無線信号を受信する手段とに応答するものであり、送信された要求無線信号と受信された応答無線信号とに基づいて到来時間差レンジを計算することにより、衛星ビークルまでのレンジを計算する手段と、レンジを計算する手段に応答するものであり、少なくとも3つの衛星ビークルまでのレンジと少なくとも3つの衛星ビークルの軌道座標とに基づいて位置を計算する手段とを備える。
(もっと読む)
端末装置、外部装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】自立型センサを有しないにもかかわらず、精度のよいマップマッチング結果を出力することができる端末装置等を提供すること。
【解決手段】観測可能衛星情報に基づいて、端末装置20の現在位置の測位に使用する測位衛星12a等の組である測位衛星組G1等のすべてを示す全衛星組情報を生成する全衛星組情報生成手段と、全衛星組情報に示される測位衛星組のすべてについて、測位を行って各測位衛星組に対応する測位位置P1等のすべてを示す全測位位置情報を生成する全測位位置情報生成手段と、すべての測位位置について、マップマッチングを行って、出力候補位置Pm1等を示す出力候補位置情報を生成する出力候補位置情報生成手段と、マップマッチングにおける補正が最も小さい出力候補位置を出力位置として選択し、出力位置を示す出力位置情報を生成する出力位置情報生成手段と、出力位置情報を出力する出力位置情報出力手段と、を有する。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 精度の高い擬似距離を選択して測位計算できるようにする。
【解決手段】 測位装置10は、GPS受信機2と赤外線カメラ7と画像処理機8と慣性装置4と観測データフィルタ5と航法計算装置6とを備えて測位計算を行う。観測データフィルタ5は、GPS受信機2から各衛星に対する擬似距離と衛星位置とを入力し、さらに、画像処理機8から赤外線カメラ7で撮像した全周囲の建物を仰角・方位角で表した撮像データを取得する。次に、自己位置と衛星位置と建物との位置関係に基づいて各衛星からの測位信号が直接波か反射波か判定する。そして、直接波である測位信号から求めた擬似距離を測位計算に使用する擬似距離として出力する。また、反射波に対して測位計算における重みを設定して出力する。航法計算装置6は、観測データフィルタ5が出力した擬似距離および擬似距離の重みに基づいて測位計算を行う。
(もっと読む)
他車両位置検出装置
【課題】他車両の位置をすばやく検出することができる他車両位置検出装置を提供する。
【解決手段】車両Bが電波遮蔽物の多い指定道路・エリアにいる場合には現在から過去所定時間分の車両B位置算出情報を送信することにより、車両Bから送信された車両B位置算出情報が一旦途切れて受信することができないことがあり、車両Aのメモリ19にマップマッチング処理を行うために必要な現在から過去所定時間分の連続した車両B位置算出情報が格納されていない場合であったとしても、マップマッチングを行うために必要な車両B位置算出情報が蓄積されるまで待つことなく、車両Aはまとめて送信された現在から過去所定時間分の車両B位置算出情報を受信すると即座に車両Bの位置を検出することができる。
(もっと読む)
データ送信装置及びデータ送信方法及び測位装置
【課題】 測位に使用する補正データのデータ送信量を低減し、また、送信する補正データの精度を向上させるデータ送信装置の提供を目的とする。
【解決手段】 この発明のデータ送信装置は、電子基準点から電子基準点情報を収集する源泉データ収集処理部102と、収集した電子基準点情報を使用することにより、基準点固有誤差を複数の電子基準点につき計算する第1計算部103と、地域データに複数のグリッド(位置表示点)を設定し、設定した複数のグリッドに対し、電子基準点につき計算した基準点固有誤差に基づき表示点固有誤差データを計算し、複数の表示点固有誤差データを送信対象データとして出力する第2計算部104と、送信対象データに含まれる少なくともいずれかの表示点固有誤差データのデータ形式を変更するデータ形式変更部1042と、データ形式が変更された表示点固有誤差データを含む送信対象データを送信するデータ送信部106とを備えた。
(もっと読む)
GPS測位精度早期安定化方法
【課題】橋梁や歩道橋などの物体が存在する道路においても常に高精度の現在位置表示が得られようにしたGPS測位精度早期安定化方法を提供すること。
【解決手段】道路にある歩道橋やトンネルなどの構造物100の出口105の近傍に、GPSアンテナ102とリピータアンテナ103を備えたリピータ101を設け、構造物100の下の道路を走行している自動車などの移動体200が出口105の近傍にきたとき、GPS衛星からGPSアンテナ102で受信した電波を、リピータアンテナ103を介して当該移動体200に中継し、移動体200に搭載したGPS受信機210による位置算出処理が、移動体200が構造物100を通過する際、その手前から開始されるようにし、GPS衛星からの電波を直接受信できる場所に移動体100が移動した際、GPS受信機が算出する位置の精度が早く復帰されるようにした。
(もっと読む)
車両用信号記録再生装置
【課題】車両用信号記録再生装置において、無線周波数信号を収録した際における収録環境を、従来よりも精度よく再現する。
【解決手段】データを記録するデータ記録部20と、搭載される車両の周囲の環境における放送信号をアンテナ11を介して受信するとともに、この受信した放送信号をA/D変換してデジタル化された放送信号を、データ記録部20に記録する信号収録再生部10と、車両の位置を検出するGPS31と、車両の位置、移動方向および速度値を算出するための車速パルスセンサー41、ジャイロセンサー42および加速度センサー43と、車両の移動情報(位置、移動方向、速度および時刻)を算出する車両位置計算表示部50と、地図情報を出力する電子地図出力手段60(地図情報出力手段)とを備える。
(もっと読む)
他車両位置検出装置
【課題】 他車両の位置をすばやく検出することができる他車両位置検出装置を提供する。
【解決手段】 通信部1を介して受信した自車両におけるGPS座標と、マップマッチングによって算出された自車両における補正後の位置座標との差をGPS誤差として算出し、該GPS誤差を用いて、他車両から取得したGPS座標の補正を行うことによって他車両の正確な位置を算出するものとしたので、他車両からGPS座標を取得すると、あらかじめ算出されたGPS誤差を用いて即座に他車両のGPS座標の補正を行い他車両の位置を検出することができる。
(もっと読む)
GPS受信機
【課題】 GPS信号を受信して測位演算を行うGPS受信機において、周囲の地形又は建造物の状況やGPS衛星の配置状況に応じて、より多くのGPS衛星からの電波を利用可能とする。
【解決手段】 このGPS受信機は、駆動信号に基づいてアンテナの受信角度を変更するアンテナ駆動機構と、制御信号に基づいてアンテナ駆動機構に駆動信号を供給するアンテナ駆動回路と、アンテナによってGPS信号を受信することにより得られた信号を増幅し、増幅された信号の周波数を変換して中間周波数信号を生成する高周波回路部と、高周波回路部によって生成された中間周波数信号を復調してベースバンド信号を生成し、ベースバンド信号に基づいて測位演算を行うと共に、GPS信号の受信状態に基づいてアンテナの受信方向を調整するための制御信号をアンテナ駆動回路に供給する測位演算制御部とを具備する。
(もっと読む)
GPS受信機
【課題】周囲環境のノイズレベルのみを正確に計測してしきい値レベルを安定かつ正確に決定し、GPS受信信号の捕捉制度を向上させることができるGPS受信機を提供する。
【解決手段】衛星ごとの拡散コードによりスペクトラム拡散された衛星30(1)〜30(N)からの信号を受信するGPS受信機において、車載機器19の立ち上がり時の過渡的な状態での影響を回避し、周囲環境のノイズレベルのみを正確に計測してしきい値レベルを安定かつ正確に決定し、GPS受信信号の捕捉制度を向上するようにしたものである。
(もっと読む)
被追跡物体の位置を確認するための方法およびシステム
【課題】 GPSをベースとして資産または物体の位置を追跡する。
【解決手段】 複数の衛星12から送信されて被追跡物体14で受信した信号相互の間の伝搬時間差に関係するデータを測定し、このデータを中央局16に伝送し、この伝送されたデータに基づいて中央局で被追跡物体の位置を計算する。被追跡物体で受信されるデータには、たとえば衛星識別番号によりそれぞれの関連する衛星を識別するデータを含め、この場合には、被追跡物体の位置を計算するステップは衛星識別番号に基づいて行われる。
(もっと読む)
641 - 660 / 820
[ Back to top ]