
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
661 - 680 / 820
GPSレシーバ

【課題】 二次元測位が継続したときに発生し得る測位誤差を低減させる。
【解決手段】 測位された高度方向の速度成分を用いて推定される当該方向の変位量を累積する累積手段と、その累積値が第一の閾値以上か否かを判定する累積値判定手段と、該累積値が該第一の閾値以上と判定されたとき、当該累積値を用いて位置測位結果を算出する位置測位手段とを備えたGPSレシーバを提供する。
(もっと読む)
複合測位による移動体の測位制御装置、システムおよびプログラム

【課題】衛星からのデータ受信が遮断される場所においても高い精度で連続的な測位を可能とし、その測位結果に基づき移動体のリアルタイム制御を実現する。
【解決手段】衛星航法と慣性航法による複合測位を用いて移動体(建機10)の位置測位を行う測位制御装置100を、複合測位であらかじめ定義された精度が得られるか否かを判定し、必要な精度が得られないと判定された場合、既知点に設置されるトータルステーション30や移動体に設置される車速センサ等、支援センサから出力される測位結果を受信し、当該測位結果を用いて慣性航法による測位誤差を補正する構成とした。
(もっと読む)
速度表示装置
【課題】 移動速度検出精度を向上させた速度表示装置を提供すること。
【解決手段】 移動体において移動速度を検出して表示する速度表示装置が、例えばGPSなどを利用して当該移動体の位置を検出する位置検出手段と、移動体位置の時間変化から当該移動体の移動速度を算出する第一の速度算出手段と、当該移動体の移動に伴って生成されたパルス信号から当該移動体の移動速度を算出する第二の速度算出手段と、第一又は第二の速度算出手段のいずれかによって算出された当該移動体の移動速度を所定の規則に従って選択的に表示する表示手段とを備える。表示手段は、1)第一の速度算出手段によって算出された当該移動体の速度と第二の速度算出手段によって算出された当該移動体の速度との差が所定時間内に所定値を超えたとき、又は、2)当該移動体の速度が所定速度以下となったとき、第一の速度算出手段によって算出された当該移動体の速度を表示する。
(もっと読む)
移動体位置検出装置、ナビゲーション装置及びプログラム
【課題】状況に応じて衛星航法受信機の受信感度を変更することで、その状況に適した衛星航法測位を行う。
【解決手段】駐車場出庫後等のような極力早いタイミングで位置・方位を修正する必要がある状況では、車載用ナビゲーション装置起動時にGPS受信機を高感度モードに設定することで速度重視の測位を行うことができる(S10,S20)。そして、位置・方位の修正が行われ(S30)、GPS速度ベクトルと自立航法速度ベクトルとがある程度近似した場合(S40:YES)は、高感度モードから低感度モードに切り替えることによって精度重視の測位を行うことができる(S50,S60)。このようにして、状況に適した受信感度でのGPS測位を行うことができるようになる。そして、状況に適したGPS測位に基づいて自立航法による測定結果を補正することで、より適切なマップマッチングを行うことができる。
(もっと読む)
車両位置取得管理システム
【課題】安価な構成のシステムで車両の正確な位置を取得できるようにすると共に、端末に大きな負荷をかけることなく車両の位置を地図上に正確に表示できるようにする。
【解決手段】GPS衛星からの電波に基づく測位精度が低下する区間において、無線タグ6から車載装置の無線タグリーダで受信した位置情報と車載装置2のGPS測位機が測位した測位情報をサーバ8が受信したとき、サーバの主制御部がその位置情報と測位情報との差分を算出すると共にずれの方向を検出して前記記憶部に記憶し、次の無線タグ6の位置情報を前記無線タグリーダが受信するまで、前記GPS測位機が測位した測位情報に対して前記差分情報とずれの方向により前記車両の位置を補正して、その補正した位置を道路上の車両の位置情報として前記記憶手部に記憶させるようにした。
(もっと読む)
移動体運動計測装置
【課題】
移動体の運動状態の計測のためのセンサやその算出手段に工夫を凝らして、移動体の運動状態を十分な精度で算出することを図る。
【解決手段】
移動体上の複数箇所に速度ベクトルデータ計測手段を設けて、指定された時間間隔で計測された速度ベクトルデータを使って、前記複数箇所の相互間の距離を拘束条件として前記移動体の運動状態を算出し、その算出された運動状態を前記速度ベクトルデータの計測時刻から指定された遅延時間後に出力する
(もっと読む)
荷物保管位置検出装置
【課題】 移動体が運搬した荷物の保管位置及び方向を迅速かつ高精度に検出することができる荷物保管位置検出装置を提供する。
【解決手段】 移動体2が運搬した荷物4の保管位置を検出する装置であって、GPS電波を受信し、所定時間間隔で移動体2の現在位置データを出力するGPS受信手段5と、GPS受信手段5が出力する移動体2の現在位置データを記憶する現在位置記憶手段11と、現在位置記憶手段11に記憶された現在位置データから移動体2の移動距離を算出し、算出した移動距離に基づいて、移動体2が運搬した荷物4の保管位置の座標を特定する座標特定手段12とを備える荷物保管位置検出装置。現在位置記憶手段11に記憶された現在位置データから、移動体2が運搬した荷物4を置いて移動する際の軌跡を算出し、軌跡に基づいて荷物4を置いた方向を特定する荷物方向特定手段を備えることができる。
(もっと読む)
無線装置
【課題】 測位地点の周辺環境の影響やGPS衛星の配置の影響等によって、測位座標点が、真の座標点に対してオフセット値を有する場合であっても、また、無線装置が、移動状態である場合であっても、十分な測位精度で当該無線装置の存在位置を決定する。
【解決手段】 本発明に係る無線装置30は、位置情報を取得する位置情報取得部31と、取得した位置情報についての推定誤差値を取得する推定誤差値取得部33と、無線装置の移動状態を決定する移動状態決定部34と、取得された推定誤差値と決定された移動状態とに基づいて、無線装置の存在位置を決定する位置決定部36とを具備する。
(もっと読む)
位置特定装置、ナビゲーション装置およびナビゲーションシステム
【課題】 高い位置精度の位置特定を行うことができるAM波等の地上波を利用した位置特定装置を提供する
【解決手段】 各発信局の位置に関する情報と各発信局の搬送波周波数の情報とを対応付けて記憶する発信局情報記憶部42と、全発信局から同時送信される同期送信波を受信する受信部43と、受信した各同期送信波の搬送波周波数を抽出し各同期送信波の送信元の発信局を識別する発信局識別部44と、受信した各同期送信波に重畳されている信号波の位相を検出する位相検出部45と、検出された信号波間の位相差および発信局情報記憶部に記憶された各発信局の位置情報に基づいて現在の位置を算出する位置算出部46とを備える。
(もっと読む)
車載器
【課題】 GPS信号やその処理中の信号等に混入したノイズによる測位精度の低下を抑える。
【解決手段】 複数のGPS衛星から発信されたGPS信号を受信可能な受信手段と、受信された複数のGPS信号を用いて車両の移動に関する情報を計測する移動情報計測手段と、計測に用いられたGPS信号にノイズが含まれているか否かを検出するノイズ検出手段と、該GPS信号にノイズが含まれていると検出されたときに、移動情報計測手段での計測に用いられるべきGPS信号の組み合わせリストを作成するリスト作成手段と、作成されたリストに基づいて移動情報計測手段での計測に用いられるべきGPS信号を組み替える信号組替手段とを車載器に備える。リスト作成手段に、受信手段により受信可能な複数のGPS信号の中から少なくとも一以上のGPS信号を除外した残りのGPS信号について可能な全ての組み合わせのリストを作成させる。
(もっと読む)
直通通信モードで動作するピア間の位置特定を支援するための方法
位置決定(308)を実行するために衛星測位支援情報を必要とする、通信ネットワーク210のサービスエリア外の移動体通信装置(202)。移動体通信装置は、直接リンクを通じてピア移動体通信装置(204,206)から支援情報を受信する。 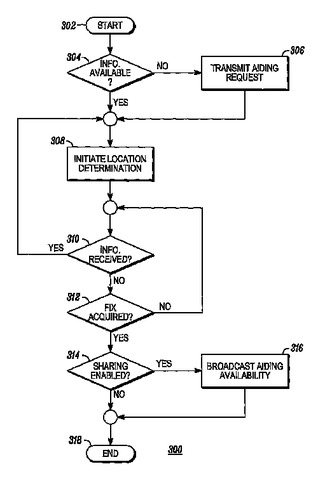 (もっと読む)
(もっと読む)
測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体、測位装置
【課題】移動しつつ現在位置を計算する場合において、出力位置の直進性、連続性及び追従性を向上し、真の位置との乖離が小さい出力位置を算出することができる測位装置の制御方法等を提供すること。
【解決手段】測位装置20が、測位位置情報生成ステップと、測位装置20が、速度情報、加速度情報及び進行方向情報の少なくとも1つを構成要素とする移動状態情報を生成する移動状態情報生成ステップと、測位装置20が、移動状態情報に示される構成要素の変化を示す移動状態変化情報を生成する移動状態変化情報生成ステップと、測位装置20が、移動状態変化情報に基づいて、回帰直線Lを生成するための基礎情報の数を決定する基礎情報数決定ステップと、測位装置20が、回帰直線を生成する回帰直線生成ステップと、測位装置20が、現在時刻における回帰直線L上の位置を示す回帰直線上位置情報を生成する回帰直線上位置情報生成ステップ等を有する。
(もっと読む)
位置補正方法及びナビゲーション装置
【課題】 GPS等によって推定した自動車の鉛直方向の位置を精度良く補正することができる位置補正方法、及びナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置1は、自動車(移動体)が受ける重力加速度の進行方向の成分を重力センサ13で測定し、測定した成分の大きさ及び向きにより、自動車が進行する向きの傾斜角を求め、各瞬間での傾斜角及び車速パルスから、自動車が移動することによる鉛直方向への変位量を求める。ナビゲーション装置1は、求めた鉛直方向への変位量に基づいて、GPSにより推定した自動車の鉛直方向の推定位置を補正し、更に鉛直方向の情報を含む地図データを用いてマップマッチングを行うことにより、自動車の推定位置を精度良く補正する。
(もっと読む)
測位システム
【課題】測位精度の向上を図った測位システムを提供すること。
【解決手段】ユーザ装置3から伝送される測位衛星の観測データを用いて、基準局装置2の衛星信号受信機211〜21nごとにキネマティック測位を行ってユーザアンテナ位置を決定する。さらに、基準局装置2からユーザ装置3へ、基準局装置2で観測した測位衛星データを伝送し、ユーザ装置3でも独自にキネマティック測位を行う。それぞれ独立してアンビギュィティを解き、それぞれユーザ装置3のキネマティック測位位置を計算する。ユーザ装置3の測位結果は、基準局装置2へ伝送する。基準局装置2で求めた複数のユーザアンテナ位置結果と、ユーザ装置3から伝送されてきたアンテナ位置結果とを比較し、ユーザ測位結果の妥当性を確かめるようにする。
(もっと読む)
速度ベクトル決定システム
【課題】GPSなどの衛星信号のみを利用して、コストアップとなる他の推測航法センサを必要とせず、高層ビル街などマルチパスの影響が大きい環境下でも、移動体の最適な速度ベクトルを求めること。
【解決手段】衛星信号追尾装置で追尾している複数衛星の中から、衛星軌道情報に基づく衛星仰角情報及び追尾情報に基づく信号レベル情報を利用して、2つの衛星が共通に含まれ且つ他の衛星が含まれ、3以上の衛星信号からなる複数の組み合わせを求める。その複数の組み合わせ毎の速度ベクトル解をそれぞれ演算して速度ベクトル解候補を得、且つそれら各速度ベクトル解候補間の一致度に基づいて、最適速度ベクトルを求める。
(もっと読む)
測位システム
【課題】高速測位システムにおいて、コストアップとなる他の推測航法センサを必要とせず、基準測位タイミングから移動体の速度の変化があった場合でも、正確な測位位置を高速に求めること。
【解決手段】基準測位タイミングにおける基準測位位置を追尾情報に基づいて求める基準測位位置演算装置と、搬送波積算位相計測装置から得られる各衛星信号の搬送波積算位相の経過時間中の変化に基づいて、経過時間内の各時刻の移動量を計算する移動量演算装置とを用い、基準測位タイミング内での測位を正確に得る。
(もっと読む)
ナビゲーション装置
【課題】 自立航法用センサからの距離情報を利用できない場合であっても、自車位置を精度良く算出することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
(もっと読む)
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
リアルタイムキネマティックGPSシステム
【課題】 リアルタイムキネマティックGPSシステムにおいて、基準局と移動局との通信が切断された際の測位誤差を減少させる。
【解決手段】 基準局201及び移動局211の各々が取得したリアルタイムキネマティック処理用GPSデータr1、r2に基づいて算出した移動局の第1の現在位置データrtk1と、移動局が単独で算出した第2の現在位置データgps1との差異を補正値Hとして取得する補正値取得手段217と、基準局と移動局との間の通信が可能な場合には、第1の現在位置データを移動局の現在位置データとし、基準局と移動局との間の通信が不可能な場合には、第2の現在位置データと、補正値取得手段が取得した補正値とに基づいて、移動局の現在位置データを算出するように切り替える補正切り替え手段218とを備えるGPSシステム。補正値取得手段等は、各々の移動局又は基準局に設けることができる。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム
【課題】精度よく推定位置を算出することができる端末装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、端末装置20の移動方向及び移動速度を示す速度ベクトル情報160を生成する速度ベクトル情報生成手段と、受信環境情報162を生成する受信環境情報生成手段と、受信環境情報162に基づいて、速度ベクトル信頼性情報164を生成する速度ベクトル信頼性情報生成手段と、前回の位置演算処理を行ったときの速度ベクトルの信頼性を示す前回速度ベクトル信頼性情報154、前回の位置演算処理を行ったときの端末装置20の移動方向及び移動速度を示す前回速度ベクトル情報154、今回の位置演算処理における速度ベクトル信頼性情報164に基づいて、今回の位置演算処理における速度ベクトル情報160を補正して、補正後速度ベクトル情報170を生成する補正後速度ベクトル情報生成手段等を有する。
(もっと読む)
661 - 680 / 820
[ Back to top ]