
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
681 - 700 / 820
移動局ナビゲーション装置および移動局ナビゲーションプログラム
【課題】 衛星用アンテナやFPU用アンテナを搭載したSNG伝送車(移動局)において、通信衛星やFPU基地局の位置関係を視覚的に提示することが可能な移動局ナビゲーション装置を提供する。
【解決手段】 移動局ナビゲーション装置1は、測定装置2から測定情報を入力する測定情報入力手段11と、測定情報と衛星位置情報とに基づいて、通信衛星の方位情報を算出する衛星方位情報算出部13aと、その方位情報により、移動局の位置を仮想の中心位置とした円環状に、通信衛星のアイコンを表示する衛星位置表示部151aと、測定情報と基地局位置情報とに基づいて、中継基地局の方位情報を算出する基地局方位情報算出部13bと、その方位情報により、移動局の位置を仮想の中心位置とした円環状に、中継基地局のアイコンを表示する基地局位置表示部151aと、を備える構成とした。
(もっと読む)
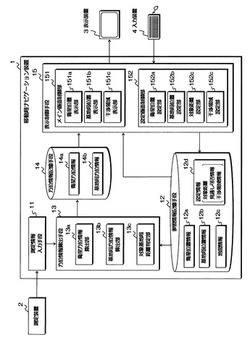
測位装置及び測位方法

【課題】受信点の移動速度と、測位手段による測位位置の変化から求めた移動距離と、を加重平均することにより位置跳びを防止できるが、余分な遅れ時間が発生する。
【解決手段】GPS測位装置10は、複数の測距部14と測位計算部21を有し、測距部14は、GPS衛星との距離を計算するメインパートと、メインパートに補助となるデータを提供するサブパートを有している。メインパートは、GPS衛星識別部42、追尾中断検知部46、航法データ復調部48、軌道メモリ52、衛星位置計算部54、コード擬似距離計算部56、オフセット推定部58及び補正擬似距離計算部70を有し、サブパートは、衛星送信時刻計算部50、キャリア積算部62、キャリア積算リセット部68、キャリア積算メモリ64、キャリア推定部60、移動速度通知器22及び測距制御部44を有している。
(もっと読む)
車両用信号記録再生装置
【課題】 放送信号と放送信号を記録した位置を特定できる位置情報信号とを同時に記録する一方、記録した放送信号と位置情報信号とを同時に再生することが可能な車両用信号記録再生装置を提供する。
【解決手段】 放送信号を受信して出力する放送信号受信部110と、放送信号の受信位置の情報を有する位置情報信号を検出して出力する位置情報信号検出部200と、放送信号受信部110の出力信号と位置情報信号検出部200の出力信号とを同時に取り込んで記憶する信号記録部と、記憶した放送信号受信部110の出力信号と位置情報信号検出部200の出力信号とを同時に出力再生する信号再生部とを備える。
(もっと読む)
測位装置
【課題】従来技術では、移動に伴うユーザ位置の変化を滑らかにするだけであり、測位結果の精度向上にはならないという問題があった。
【解決手段】車両に搭載されたGPS測位装置10の測位計算部16は、複数のGPS衛星12からの擬似距離によって求められた位置ベクトルP(t)と、ドップラー周波数から算出された移動速度の速度ベクトルV(t)を測位信頼度算出部22に出力する。次に、測位信頼度算出部22は、信頼度S(t)を求め、時定数算出部24に出力する。時定数算出部24は時定数T(t)を補正位置算出部26に出力する。さらに、補正位置算出部26は、位置ベクトルP(t)と時定数T(t)を取得して補正されたユーザ位置P’(t)を出力する。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】場面に応じて必要とする測位精度の測位部を選択できるようにする。
【解決手段】高精度の第1測位部21と第1測位部よりも精度の劣る第2測位部22とを切替部24が切り替え、切り替えられた測位部が測位する。切替部24は、選択判定部34が出力する判定信号に従って切り替える。判定条件記憶部32は、判定条件として、移動体情報端末が装備された移動体の速さと所定の設定値との大小関係を示す判定条件式を記憶している。判定条件設定部33は、前記判定条件式を用いて判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は、前記判定条件信号を入力し、また、車速検知部90から前記移動体の速さを入力し、入力した速さが前記設定値以下のときは第1測位部を選択するべき判定を行ない、入力した速さが前記設定値よりも大きい場合には第2測位部を選択するべき判定を行ない、判定結果を判定信号として出力する。
(もっと読む)
携帯端末
【課題】通信により移動速度を算出する携帯端末を提案する。
【解決手段】複数の相関演算系を含む受信系と、各相関演算系に接続された中央処理装置を備え、受信系により複数のGPS衛星または符号分割多元接続方式の通信基地局からの電波を受信する機能を有する携帯端末であって、各相関演算系を用いて、時系列に複数回に亘りGPS衛星または通信基地局に対する測位動作を行ない、この測位動作に基づく測位履歴データを記憶し、中央処理装置が、測位履歴データに基づいて、携帯端末の移動速度を求める。
(もっと読む)
車載用ナビゲーション装置
【課題】 絶対傾斜角を検出することによって、傾斜を有する地点においても自車位置を高精度に検出することができ、ひいては、自車を目的地まで迅速かつ適切に案内することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】 自車の進行方向に対する自車の絶対的な傾斜角度である絶対傾斜角を計算する絶対傾斜角計算手段32と、この絶対傾斜角計算手段32によって算出された前記絶対傾斜角に応じたジャイロセンサ6の感度の補正を行う補正手段33とを備えたこと。
(もっと読む)
移動局の横滑角計測装置
【課題】 横滑角の精度を高めた移動局の横滑角測定装置を提供する。
【解決手段】 移動局に搭載した角速度センサ10およびGPS演算装置12と、移動局の重心に搭載した加速度センサ14と、角速度センサ10から得られるヨー角速度(r)と横滑角速度(dβ/dt)とを加算した値と、加速度センサ14から得られる公転加速度(d2y/dt2)をGPS演算装置12から得られる前進速度(v)で除した値とに基づいて積分を行うことで積分値(I)を求め、当該積分値(I)を横滑角(β)として算出する横滑角算出手段20とを有する。加速度センサ14を重心に搭載するので、横滑角速度(dβ/dt)に起因する加速度の混入が防止され、公転加速度(d2y/dt2)のみを検出できる。このように加速度センサ14へ横滑角速度(dβ/dt)に起因する加速度の混入を防止した点で、横滑角(β)の精度が高められる。
(もっと読む)
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
(もっと読む)
位置検出装置
【課題】 走行距離センサ等を用いることなく、2次元測位時においても高精度の高度を得ることが可能な位置検出装置を提供する。
【解決手段】 この位置検出装置1は、アンテナ2と、GPS受信処理部3と、計時処理部4と、高度情報格納部5と、演算処理部6とを具備する。高度情報格納部5は、演算処理部6によって作成される高度マップを格納する。演算処理部6は、GPS受信処理部が3次元測位を行っている場合に、一群のエリアの内の現在位置が属するエリアの高度マップを、3次元測位された現在位置の経度、緯度、及び/又は、高度を用いて更新し、GPS受信処理部3が2次元測位を行っている場合に、一群のエリアの内の現在位置が属するエリアの高度マップを用いて高度を算出する。
(もっと読む)
受信装置
【課題】電波の発信源とアンテナの間に存在する障害物に応じて受信出力を補正して、発信源の位置を精度よく検出できる受信装置を提供すること。
【解決手段】受信指向方向を切換可能なアンテナ4を有し、その受信指向方向を切り換えて電波を受信し、その受信出力に基づいて電波の発信源の位置を検出する受信装置1であって、アンテナ4の受信出力の変動量に基づいて受信出力を補正し、その補正された受信出力に基づいて歩行者90の位置を検出する。アンテナ4の受信出力の変動量に基づいてその受信出力を補正することにより、歩行者90とアンテナ4の間に存在する障害物によって減衰した受信出力を適切に補正でき、補正された受信出力に基づいて歩行者90の位置を精度よく検出することができる。
(もっと読む)
測位装置及び測位方法
【課題】 建物などからのマルチパス波による測位精度劣化を防ぐ。
【解決手段】 複数の測位衛星から測位信号を受信して各測位衛星との疑似距離と測位衛星の位置情報を含む測位関連情報を測位演算部及びデータ抽出部に出力する受信機と、この受信機と測位演算部と地理情報データベースとに接続し、測位演算部が測位関連情報を用いて推定した自己位置と地理情報に基づき自己位置を算出する測位演算に利用する測位衛星を選択するデータ抽出部と、選択された測位衛星の測位関連情報により自己位置を算出する測位演算部とを備えた測位装置であって、前記地理情報は分割された測位エリアと前記測位エリアごとに対応して予め設定された仰角値との対応テーブルを備え、前記データ抽出部は、前記推定した自己位置と前記対応テーブルとから求まる仰角値以上の範囲にある測位衛星を選択する判定部を備えた。
(もっと読む)
移動体端末用アンテナ追尾装置および移動体端末用アンテナ追尾方法
【課題】指向性可変アンテナを容易に通信衛星へ指向させることが出来る移動体端末用アンテナ追尾装置および移動体端末用アンテナ追尾方法を提供する。
【解決手段】準天頂衛星が配信する端末制御情報は、地球上の各地点から見た準天頂衛星の方角情報を含んでいる。GPS受信部22は、移動体端末10の現在位置を検出し、指向性制御部28はまず、フェーズドアレイアンテナ11の指向性を比較的広く制御する。端末制御情報受信部23は、フェーズドアレイアンテナ11を介して端末制御情報を受信し、姿勢角センサ25および方位センサ26は、移動体端末10の3次元の姿勢角を検出し、アレイファクタ計算部27は、端末制御情報に姿勢角分の補正を施して、アレイファクタ情報をアレイファクタ記憶部21から検索する。指向性制御部28は、補正された指向性制御情報を基にフェーズドアレイアンテナ11の指向性をより狭く制御し準天頂衛星へ指向させる。
(もっと読む)
測位装置
【課題】
周波数の推定に要する時間を短縮し、誤った周波数でロックされることのない測位装置の提供を図る。
【解決手段】
測位装置16は、信号処理部4で、測位用衛星Gからの信号を第1のPLL回路により追尾し、測位用衛星Fからの信号を第2のPLL回路により追尾する。インターフェイス20で移動体の移動情報を受け付ける。測位演算部15で、衛星Gと衛星Fの移動によるドップラーシフトと、ドップラーシフトの移動体の移動分と、衛星発振器のドリフトと、衛星Gを追尾するための第1のPLL回路の周波数修正値と、から、衛星Fを追尾するための第2のPLL回路の周波数修正値を算出する。
(もっと読む)
位置情報通信端末
【課題】消費電力を抑えた小型で汎用性のある位置情報通信端末を提供する。
【解決手段】GPS処理と位置情報通信端末10の制御を司るGPSコントローラ12は、GPS信号を入力するGPS入力系と、図示しない基地局と通信をするための通信系と、取り外し自在に接続された外部メモリに接続するデータ系と、外部インターフェースを介して外部の状況をモニタするモニタ系と、簡単なステータスを表示する表示LED18と、電源回路17と、を有している。
(もっと読む)
測位装置
【課題】
車体の状態値の測定が精度良く行える測位装置を提供することを図る。
【解決手段】
測位用衛星からの信号に基づいて電波受信地点の測位を行う測位部6と、移動体の状態値を検出するセンサ7と、を備え、トリガ信号発生部によりトリガ信号を所定周期で発信し、前記トリガ信号をトリガとして、キャリアNCOの周波数を前記測位用衛星からの信号に同調させ、第1のトリガ信号から第2のトリガ信号までの期間における、電波受信地点の移動量を測定するとともに、第1のトリガ信号から第2のトリガ信号までの期間における、前記センサの検出する状態値の変化量を測定する。
(もっと読む)
車両走行速度測定方法及びその装置
【課題】車両走行時のタイヤの回転に伴って生ずる加速度を検出して車両の走行速度を測定する車両走行速度測定方法及びその装置を提供する。
【解決手段】タイヤ300の回転に伴って回転軸に直交する方向に発生する加速度を検知する加速度センサを備えたセンサユニット100をタイヤ300を含む回転機構部に設け、検出した加速度αと、回転軸から加速度センサまでの距離rとタイヤの半径Rとを式(v1=R×(α/r)1/2)に代入して走行速度v1を算出すると共に、加速度αの検出結果に重畳している重力加速度によるサイン波の周期tを検出し、半径Rと周期tとを式(v2=2πR/t)に代入して走行速度v2を算出し、走行速度v2を基準とした走行速度v1に対する補正係数β1(=v2/v1)を式[β1=2π/{t×(α/r)1/2}]に代入して算出し、走行速度v1に補正係数β1を乗算した値を算出して測定結果とする。
(もっと読む)
GPS受信機
【課題】 アベイラビリティの低下を招くことなく、擬似距離誤差を低減して、測位精度を高めることができるGPS受信機を得ることを目的とする。
【解決手段】 信号処理部2により計測された擬似距離ρCτiと擬似距離変化率Δρrateiから重み係数kを求め、その重み係数kに応じた擬似距離ρCτiと擬似距離変化率Δρrateiの重み加算を実施して、その擬似距離ρCτiを平滑化する擬似距離平滑化部5を設け、その擬似距離平滑化部5により平滑化された擬似距離ρSiと衛星位置算出部3により算出されたGPS衛星の位置から自動車の現在位置PCを測位する。
(もっと読む)
車両の走行制御装置
【課題】 基準局の異常を的確に検出し、精度のよい走行制御を実現することができる車両の走行制御装置を提供する。
【解決手段】 制御装置18は、基準局4からの情報とGPS衛星3からの情報に基づいて測位した自車位置から自車両1の走行情報(第1の走行情報)を演算し、この第1の走行情報が実車の走行状態から求まる走行情報(第2の走行情報)に対して予め設定した閾値以上異なるとき、基準局4が移動することによる該基準局4の異常を判定することにより、基準局4の異常を的確に検出する。そして、制御装置18は、異常判定時に、自車位置に基づく走行制御の実行をキャンセルすることにより精度のよい走行制御を実現する。
(もっと読む)
無線基地局、管理システムおよび無線通信システム
【課題】 通信端末を各通信システムに対して共通に使用可能とし、屋内でも測位可能とする。
【解決手段】 無線通信システム1は、1以上の管理システム103、1以上の無線基地局200および1以上の通信端末300を含んで構成される。管理システム103の外部通信用インタフェース106は、外部通信網110から受信したコンテンツまたは通信内容データを共通のフォーマットに変換したり、通信端末300から無線基地局200を介して受信した通信内容データを通信システムに対応したフォーマットに変換したりする。無線基地局200は、測位用信号100を受信し、それを測位用情報にして通信端末300に送信する。通信端末300は、無線基地局200から測位用情報を受信し、その測位用情報を蓄積部または表示部に出力する。
(もっと読む)
681 - 700 / 820
[ Back to top ]