
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
721 - 740 / 820
GPS受信装置およびGPS受信装置における誤差円半径の設定方法
【課題】 GPSによる測位誤差を正確に反映した誤差円半径を設定できる「GPS受信装置およびGPS受信装置における誤差円半径の設定方法」を提供する。
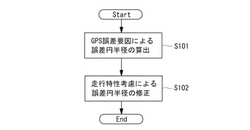
【解決手段】 誤差円半径の設定方法は、2次元測位時に、3次元測位時の高度情報、垂直方向の測位位置精度情報、および速度情報を利用して高度誤差を予測するステップと、予測された高度誤差に基づき2次元測位時の測位誤差を示す誤差円半径を設定するステップと、2次元測位または3次元測位の測位結果に基づき移動特性を算出するステップと、算出された移動特性に基づき設定された誤差円半径を修正するステップとを有する。
(もっと読む)
衛星信号から導かれるドリフト推定を使用したGPS受信機の調整可能クロック
ナビゲーションシステムは、少なくとも1つの全地球測位衛星信号を受信して、全地球測位衛星情報を出力するための全地球測位衛星受信機を備える。ナビゲーションシステムはさらに、ソフトウェアを実行するために、全地球測位衛星受信機に通信できるように結合された、プログラム可能プロセッサを備える。ナビゲーションシステムはさらに、プロセッサクロック情報を出力するために、プログラム可能プロセッサに通信できるように結合されたクロックを備える。ソフトウェアは、GPS情報を使用してプロセッサクロック情報内のドリフトの量を推定し、調整済みプロセッサクロック情報を生成するために、ドリフトの量に対してプロセッサクロック情報を調整する。ソフトウェアは、少なくとも全地球測位衛星情報と調整済みプロセッサクロック情報の関数としてナビゲーション解を生成する。  (もっと読む)
(もっと読む)
位置関係検出装置

【課題】 移動速度が遅い場合等であっても、目標地点との位置関係を精度良く検出することが可能な位置関係検出装置を提供する。
【解決手段】 この位置関係検出装置1は、人工衛星からの電波を受信することにより現在の位置を表す位置情報を算出して出力するためのGPS受信部2と、所定の目標地点に至る所定の経路上の一群の領域をそれぞれ表す一群の領域情報を記録するための領域情報記録部3と、位置情報によって表される位置が一群の領域の中の1つ又は複数の領域に属するか否かを検出するための処理等を行うための演算処理部4と、GPS受信部2から前回出力された位置情報によって表される位置が属する領域として演算処理部4によって検出された領域を表す前回領域情報を記録するための前回領域情報記録部5とを具備する。
(もっと読む)
GPSレシーバにおけるサーチ周波数の設定方法、GPSレシーバ、及び、車載器
【課題】 TTFFを効率良く短くさせることができる。
【解決手段】 GPS信号を第一のレンジでサーチし、第一のレンジによるサーチを所定回数実行してもGPS信号を捕捉できない場合に第一のレンジよりも広い第二のレンジでGPS信号をサーチし、これを繰り返して段階的にサーチレンジを広げていくサーチステップを含んだ、測位に必要な複数のGPS信号を捕捉する方法であって、GPS信号を捕捉できる状態に移行したか否かを判定する判定ステップと、GPS信号を捕捉できる状態に移行したと判定したときに、サーチステップを、終了させて最初から開始する開始ステップとを含んだ方法を採用する。
(もっと読む)
測位装置
【課題】 追尾している衛星から送信された衛星信号の受信が途絶えた状態から衛星を再捕捉する際に、反射波だけで衛星を再捕捉してしまうことを防止することができる測位装置を提供する。
【解決手段】 衛星によってC/Aコードでスペクトル拡散されて送信された衛星信号に基づいて測位する測位装置1において、C/Aコードを発生するC/Aコード発生器12と、スペクトル拡散された衛星信号とC/Aコード発生器12によって発生されたC/Aコードとの相関値を算出するための積分器14と、衛星信号をスペクトル拡散したC/Aコードの位相を検出するタイミング制御部13とを備え、タイミング制御部13は、相関値が閾値未満となった場合には、C/Aコードの位相を予測し、C/Aコード発生器12によって発生されたC/Aコードを構成するビットが次のビットに代わるタイミングから一定時間以内に積分器14が積分を制限するように制御する。
(もっと読む)
位置検出装置
【課題】 GPS測位解の誤差推定値を変更することなく、位置推定精度の低下を抑制することができる位置検出装置を提供すること。
【解決手段】 ナビ情報取得部624は、移動体の現在位置がマルチパスの発生し易い地域内である場合にナビゲーション装置610から出力される受信強度情報を取得する。受信感度変更部625は、ナビ情報取得部624の取得した受信強度情報に基づいて、受信感度フィルタ部622における閾値レベルを通常レベル(直接波を受信した場合の受信強度)よりも高いレベルに変更することにより、GPS信号の受信感度を低下させる。
(もっと読む)
路面電車位置検知装置
【課題】停留所における路面電車の発着を車両位置情報に基づいて的確に判定する。
【解決手段】路面電車20に搭載されて車両位置を検知する位置検知装置30において、位置情報を得るGPS受信機33と、路面電車20の速度計22から速度情報を取得し運転方向切換スイッチ23から運転方向を取得する速度情報取得装置35と、停留所の地上基地局装置に適合した無線機36と、路線マップデータを用いて位置情報を路線上に変換するマップマッチング手段と速度情報や運転方向に基づいて位置情報の更新を選択的に行う速度反映手段と停留所マップデータを用いて位置情報から路面電車20の出発および到着を判定する発着判定手段とを有した車上処理装置34とを備える。
(もっと読む)
移動体の捜索システム
【課題】 移動体の捜索を安定して行うことができる信頼性の高い捜索システムを提供する。
【解決手段】 この捜索システムは、発信器(2)(2)…と、その発信器(2)から発信された電波を受信する複数の基地局(3)(3)…と、それら基地局(3)(3)…から送信された情報を受信して発信器(2)(2)…が装着された移動体(1)(1)…の位置を特定するとともに、その位置情報を各種端末(30)(30)…に送信するセンタ(4)とを備え、発信器(2)(2)…を、外部からの電源のオンオフ操作を不能とした状態で、移動体(1)(1)…の目立たない箇所に固着してある。
(もっと読む)
測位システム
【課題】位置が既知である複数個の電波発信器からの電波の到来方向を用いて自己位置を決定する際に、自己位置が不定にならないように測位することを可能とする。
【解決手段】電波発信器1は絶対座標系における位置が既知であって電波を送信する。アンテナ装置2は4個以上の電波発信器1からの電波を受信し、各電波発信器1からの電波の到来方向を検出する。アンテナ装置2で得られた到来方向と電波発信器1の位置とを用いて各2個の電波発信器1とアンテナ装置2との3点を通る円周C1,C2を2個設定し、円周C1,C2同士の交点のうち電波発信器1の位置を除く位置をアンテナ装置2の位置として求める。ただし、一つの円周C1の内外に規定幅で設定した判定領域D1に3個以上の電波発信器1を含むときには、円周C2を求めるための2個の円周のうちの一方の電波発信器1として判定領域D1外の電波発信器1を用いる。
(もっと読む)
GPS受信機およびGPS受信機の測位方法
【課題】測位感度や測位スピードなどの性能を劣化させること無く、レンジの計算に必要となるレンジデータを周期的に取得でき、かつ、消費電力の省力化をも実現する。
【解決手段】周波数変換部4からのIFデータに対して、同期保持部6はキャリア周波数の同期、C/Aコードの位相同期を捕捉して保持し、レンジデータなどの必要な情報を取得する。レンジデータを取得した場合には、制御部7は、スイッチ23をオフにして同期保持部6への電源の供給を停止し、取得したレンジデータなどを用いて測位演算を行い、現在位置を示す測位情報を求めてこれを出力するが、測位情報の出力周期と、測位情報を求めるのにかかる時間に応じて、同期保持部6を停止させる時間を制御する。
(もっと読む)
車両の位置を設定するための方法及び装置
無線ネットワーク測位システム(2)によって、接続可能なターミナル(12)の位置を検出し、車両(1)の第1の位置信号をターミナル(12)及び/又は計算ユニット(11)に伝送する、無線ネットワーク測位システム(2)の少なくとも1つの接続可能なターミナル(12)と計算ユニット(11)とによって車両(1)の位置を設定するための方法及び装置において、第1の運転様式では、第1の位置信号が直接ポーリング毎に伝送され、その際、このポーリングは、手動及び/又は自動で発生され、第2の運転様式では、第1の位置信号が周期的に周波数(f)で伝送され、その際、この周波数(f)は、変更可能であるように構成する。 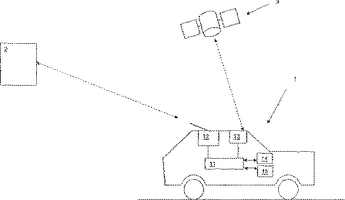 (もっと読む)
(もっと読む)
サイクルスリップ検出装置及びサイクルスリップ検出方法
【課題】サイクルスリップの検出ならびにサイクルスリップが発生している人工衛星の特定を効率的且つ確実に行うことが可能なサイクルスリップ検出装置及びサイクルスリップ検出方法を提供する。
【解決手段】人工衛星2aと人工衛星2bのそれぞれにおけるキャリア位相加速度と加速度平均値との差分と、これらの差分の差である人工衛星差分差とを求める演算部と8と、この人工衛星差分差と所定の閾値とを比較し、人工衛星差分差が閾値より大である場合に人工衛星2a及び2bのそれぞれにおける差分と所定の閾値とを比較し、差分が前記の閾値より大である人工衛星にサイクルスリップが発生していると判定する判定部9とを設ける。
(もっと読む)
建設機械の計測表示機構
【課題】 建設機械本体の姿勢を算定して建設機械の周辺状況と共に表示手段に正しく表示することができる建設機械の計測表示機構を提供する。
【解決手段】 下部走行体及び上部旋回体を有する車体と地中を掘削する作業機とを備えた建設機械に使用され一対のGPS受信機43,44での計測結果に基づいて作業機のモニタポイントの三次元位置を計測して、車体等を建設機械の周辺状況と共にモニタ46aに表示してオペレータに伝達する建設機械の計測表示機構において、GPS受信機43,44での計測結果に基づいて上部旋回体の姿勢に係る値を演算する旋回体の姿勢演算手段と、この上部旋回体の姿勢演算手段で演算された上部旋回体の姿勢に係る値の水平方向の成分の変化に基づいて上部旋回体に対する下部走行体の姿勢に係る値を演算する走行体の姿勢演算手段を車載コンピュータ46に設けて、車体をモニタ46aに表示する場合に下部走行体及び上部旋回体の各姿勢を表示できるように構成した。
(もっと読む)
ナビゲーション・システム
ナビゲーション・システムは現在位置を推測しない第1動作状態と現在位置を指定する第2動作状態を有する第1ナビゲーション・モジュールを含む。第1ナビゲーション・モジュールの第1動作状態に応答して第2ナビゲーション・モジュールが推測航法を行う。 (もっと読む)
移動体用航法装置
【課題】 移動体の高度を安価な構成で且つ精度良く検出する移動体用航法装置を得る。
【解決手段】 気圧高度計5では、気圧を計測し、その計測される気圧に応じて移動体の高度を検出する。気圧高度計校正装置6では、気圧高度計5により検出される移動体の高度を、GPS測位装置1により検出される移動体の高度を基準として校正し、複合航法計算装置7では、GPS測位装置1による測位不可時に気圧高度計校正装置6により校正された移動体の高度を利用して移動体の位置速度を計算するようにしたので、GPS測位装置1による測位が不可能になっても、移動体の高度を安価な構成で且つ精度良く検出することができる。
(もっと読む)
無人搬送車の誘導装置
【課題】 走行路の誘導標識体を不要として走行路の工事費用を縮小すると共に、車輌コストを低減することができる無人搬送車の誘導装置を提供すること。
【解決手段】 屋外の見晴らしの良い走行路では、GPS信号および第1カルマンフィルタ13に基づいて、慣性航法演算部11で算出された無人搬送車1の位置及び方位(N,E,θ)の誤差を補正し、一方、屋内あるいは遮蔽物などによりGPS信号が切れた場合には、レーザレーダ10および第2カルマンフィルタ15により、無人搬送車1の位置及び方位(N,E,θ)の誤差を補正する。これにより、屋外および屋内を問わず如何なる場所においても、走行路に誘導標識体を必要とせずに、精度良く無人搬送車1を誘導することができる。
(もっと読む)
サイクルスリップ検出装置及びサイクルスリップ検出方法
【課題】効率的且つ確実にサイクルスリップを検出することが可能なサイクルスリップ検出装置及びサイクルスリップ検出方法を提供する。
【解決手段】人工衛星2aの過去におけるキャリア位相をn次の方程式により最小二乗近似し、これにより未来時刻におけるキャリア位相を推定し、推定されたキャリア位相と、前記の時刻におけるキャリア位相の実測値との差分を求め、この差分と所定の閾値とを比較し、差分が閾値より大である場合に別の人工衛星2bについても同様の処理を行う演算部8と、これにより求められた差分が閾値以下である場合にサイクルスリップが発生していると判定する判定部9とを設ける。
(もっと読む)
捜索支援システム
【課題】捜索対象を特定する情報を携帯通信端末の所持者等の第三者に知られることなく、捜索依頼者好みの捜索範囲で捜索対象の詳細な捜索を安価に行なうことができる捜索支援システムおよび当該捜索支援システムを実現するための携帯通信端末を提供すること。
【解決手段】捜索支援システムは、複数の近距離無線装置10と、複数の携帯電話端末(即ち、携帯通信端末)20と、複数の携帯電話基地局30および制御装置60を有する移動体通信網と、捜索センタサーバ40と、捜索依頼端末50と、を備え、捜索依頼者により指定された捜索対象(例えば、犬1-2)の捜索対象識別データを用いて犬1-2を捜索する。捜索対象識別データは、その種類を特定する(つまり、犬であることを特定する)種類識別データと、その犬1-2固有の特徴を特定する特徴識別データと、を含む。携帯電話端末20はGPS装置を有しているので、携帯電話端末20と犬1-2に取り付けられた近距離無線装置10とが交信後、携帯電話端末20の位置情報が捜索依頼端末50に送信される。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
建設機械の出来形情報処理装置
【課題】 出来形に関する情報を従来の技術よりも正確に取得することができる建設機械の出来形情報処理装置を提供する。
【解決手段】 バケット7に予め設定したモニタポイントに係る三次元位置の計測結果に基づいて、フロント作業機4により掘削して形成された地形に関する情報を取得するようにした油圧ショベルの出来形情報処理装置において、油圧ショベル1が発する信号に基づいて、フロント作業機4の作業状態が掘削作業の状態にあるか否を判定する作業状態の判定手段を設け、フロント作業機4の作業状態が掘削作業の状態にあると前記判定手段で判定されたときに、前記モニタポイントに係る三次元位置の計測結果に基づいて前記地形に関する情報を取得するように構成した。
(もっと読む)
721 - 740 / 820
[ Back to top ]