
Fターム[5J062BB03]の内容
Fターム[5J062BB03]に分類される特許
61 - 80 / 170
衛星ナビゲーション・システムにおけるステータス・レポートの最適化方法
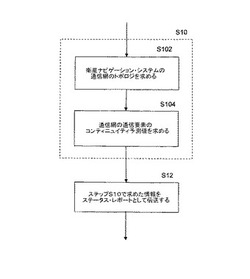
【課題】衛星ナビゲーション・システムにおけるステータス・レポートを最適化する方法を提供する。
【解決手段】衛星ナビゲーション・システムの通信網に関する情報を求める情報取得ステップ(S10)と、求めた前記情報を、ステータス・レポートとして、1つまたは複数のナビゲーション・メッセージを介して伝送する情報伝送ステップ(S12)とを含む。
(もっと読む)
衛星システムを用いたインターネットホットスポットの位置決め
種々の実施形態により、衛星信号をインターネットホットスポット信号と統合することにより、減衰した環境においてナビゲーションを行うためのシステムと方法が開示される。一実施形態では、位置情報取得を行う受信装置は、衛星から、周期的に反復するコードを含む精密時間信号を受信し、無線ネットワークステーションから、追加的な補助情報を受信するアンテナを備えている。この受信装置は、プロセッサと、コンピュータで読み取り可能な複数の指令を記憶するメモリも備えており、これらのコンピュータで読み取り可能な複数の指令がプロセッサによって実行されることにより、受信装置は、精密時間信号と追加的補助情報とを使用して正確な絶対時間を求め、受信装置に関する位置決め情報を求め、この位置決め情報を使用して無線ネットワークステーションの位置情報を要求し、且つ位置決め情報と位置情報とを使用して受信装置の絶対位置情報を求める。 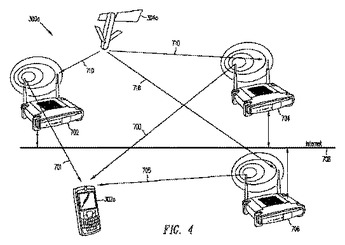 (もっと読む)
(もっと読む)
併合衛星システム信号を使用するナビゲーションのための衛星受信機および方法

ナビゲーションのための全地球的航法衛星システム(GNSS)受信機の実施形態および方法を一般的にここで説明する。幾つかの実施形態では、GNSS受信機は複数の各チャンネル帯域内で2以上の信号測定を行うことにより持続的な干渉を有するチャンネルからクリアチャンネルを体系的に識別するための信号処理回路を含んでいる。チャンネル帯域はGPS衛星、GALILEOシステム衛星またはGLONASSシステム衛星のような少なくとも2以上の異なる全地球測位衛星システムの少なくともチャンネル帯域を含んでいる。幾つかの実施形態ではGNSS受信機は衛星ナビゲーションシステムでの自己適用のジャミング回避を行う。 (もっと読む)
擬似距離評価システム及び擬似距離評価方法,プログラム
【課題】衛星測位システムでの測位計算の際にリアルタイムスムージング処理された擬似距離が異常値を示した場合に、この異常値の発生原因を迅速に特定する擬似距離評価システム及び擬似距離評価方法,擬似距離評価用プログラムを提供する。
【解決手段】測位計算に利用されるリアルタイムスムージング処理後の擬似距離から異常値を検出した場合に、この異常値と同一の観測時刻におけるポストプロセススムージング処理後の擬似距離が正常値であるか否か判定し、正常値であれば、検出した異常値の発生原因をリアルタイムスムージング処理の限界による残留ノイズであると判定するデータ処理部2を備えた。
(もっと読む)
相対位置検知装置、及び相対位置検知システム
【課題】3台以上の移動体間の相対位置を干渉測位によって求めると共に、干渉測位に関する信頼性判定を効率的に行なうこと。
【解決手段】自己が搭載された移動体を含む3台以上の移動体が互いに通信可能な所定の場面において、基準移動体である場合には観測データ取得手段により取得された観測データを含むデータを非基準移動体に送信し、非基準移動体である場合には観測データ取得手段により取得された観測データ及び基準移動体から受信した観測データを含むデータを用いた干渉測位を行なって基準移動体との相対位置を算出すると共に、干渉測位の結果として算出される整数値バイアスを含むデータを他の非基準移動体に送信して干渉測位に関する信頼性判定結果を受信する処理と、他の非基準移動体から整数値バイアスを含むデータを受信して干渉測位に関する信頼性判定を行なう処理とのいずれか一方を行なう。
(もっと読む)
測位システム及び測位方法
【課題】測位目標が放射する電波を複数の移動体で受信しこれらの間で生成される到来時間差、到来周波数差を用いて目標の位置を特定する測位精度のよい測位システムを得る。
【解決手段】位置が未知な電波放射源1が放射する電波を受信して観測する受信手段を搭載した少なくとも2つの移動プラットフォーム3a,3bと、各移動プラットフォームからの観測情報の受信信号、移動ベクトル情報及び位置情報から受信信号の到来時間差及び到来周波数差を求め電波放射源の位置を標定する信号処理手段35と、各移動プラットフォームからの観測情報の移動ベクトル情報に基づき各移動プラットフォームにおける次の観測における最適移動方向及び最適移動速度を計算し各移動プラットフォームへそれぞれの計算結果を送り、各移動プラットフォームへ同期した移動観測を行わせる最適移動ベクトル計算手段36と、を備える。
(もっと読む)
航法データ更新通知システム及び方法
【課題】衛星航法補強システムに採用することにより、地上システムと機上システムとで使用する航法データを一致させて測位精度の悪化を回避して安全性を図る。
【解決手段】衛星から受信したレンジング信号に含まれる誤差を推定し、その誤差を修正するための補正情報をフォーマッティングして送信する地上システムと、前記測位衛星から受信したレンジング信号と、前記フォーマッティングされた補正情報とに基づいてディファレンシャルGPS測位演算し規定ルートからの変位を表示する機上システムとを有し、前記地上システムは、前記補正情報を生成する際に使用したSBAS航法データが更新された際に航法データの更新を前記補正情報に付加して通知する。前記機上システムは、前記送信される前記SBAS航法データ更新の通知を検出し、前記更新されたSBAS航法データに切り替えて前記ディファレンシャルGPS測位演算する。
(もっと読む)
受信されたSPS信号の時間基準を入手するシステムおよび方法
本明細書で開示される主題は、衛星および/または地上ナビゲーション・システム内の送信機から受信される信号の時間基準を入手するシステムおよび方法に関する。受信機で第1送信機から受信される第1信号に関連する第1の時間基準が入手される。第2送信機からの第2信号に関連する第2時間基準が、第1の時間基準および受信機から第1送信機までの第1飛程と受信機から第2送信機までの第2飛程との間の推定された差に基づいて入手される。 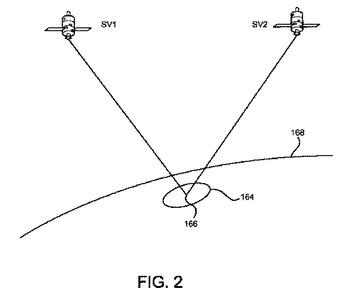 (もっと読む)
(もっと読む)
移動体用測位装置
【課題】擬似距離の誤差の大きい場合でも精度の良い測位演算を行う。
【解決手段】擬似距離を算出するPSR算出手段と、ADRを算出するADR算出手段と、擬似距離に基づいて移動体の位置を測位する測位手段と、衛星位置を算出する衛星位置算出手段と、前回周期における移動体の位置の測位結果と、前回周期における衛星位置の算出結果との差分ベクトルの大きさに基づいて、前回周期における擬似距離の推定値を算出する前回値PSR推定手段と、推定前回値に、前回周期と今回周期において算出された各ADRの差を足し合わせて、今回周期における擬似距離の推定値を算出するPSR推定手段と、擬似距離の誤差が所定許容範囲を超えたか否かを判定するPSR誤差判定手段とを備え、測位手段は、今回周期において擬似距離の誤差が所定許容範囲を超えたと判定された場合に、該擬似距離に代えて、推定擬似距離に基づいて、今回周期における移動体の位置を測位する。
(もっと読む)
電離層補正値を算出するネットワーク及び方法
本発明は、電離層補正値を計算し、衛星ナビゲーションシステムのユーザに提供することを可能にするネットワークに関し、ネットワークが、
− 衛星(GNSS)によって伝送されたナビゲーション信号の遅延を計測可能な機上搭載のRF受信機(21)をそれぞれが備える複数の航空機(2)によって構成される航空ユーザセグメントと、遅延の前記測定値を地上セグメント(300)に伝送するための、複数の航空機(2)と地上セグメント(300)との間の航空データ通信手段(5)と、を備える航空セグメント(200)と、
− グリッドの計算に使用される遅延の計測値であり、複数の航空機(2)から及び複数の地上局(SBAS G)からもたらされる遅延の計測値を、地上セグメント(300)のレベルで受信する手段と、を有することを特徴とする。 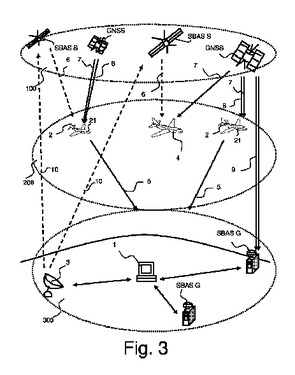 (もっと読む)
(もっと読む)
衛星ナビゲーションシステムのインテグリティのリアルタイム監視用の装置および方法
本発明は、衛星ナビゲーションシステムのインテグリティ(11)の表示を推定する手段を提供する計算装置であって、ナビゲーションシステムによって計算されたデータを測定することによって、非常に低確率のロケーションエラーに対してシステムのインテグリティ(11)の表示をリアルタイムで推定する手段を含み、これらの手段が
−ロケーションシステムによって計算されたデータを受信する手段、
−ロケーションエラーの分布モデル(H)を推定する手段、
−分布モデル(H)を特徴づけるパラメータを推定する手段、
−非常に低確率のロケーションエラーの分布のモデリングを可能にする分布モデルを特徴づけるパラメータの関数として極値理論を適用する計算手段、
−非常に低確率のロケーションエラーのためにインテグリティ(11)の表示をリアルタイムで推定する手段、
−リアルタイムでインテグリティ(11)の表示を送信する手段
を含むことを特徴とする計算装置に関する。  (もっと読む)
(もっと読む)
精度不良を検出するための装置を備えるナビゲーションシステム
【課題】電離層誤差データを用いて、保護限界を精度良く求める。
【解決手段】複数の送信機から複数の信号を受信するように動作可能な受信機を有する車両用のナビゲーションシステムは、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、当該命令は、プロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主ナビゲーション解の誤差共分散行列を求めること、及び解分離技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
航行体の姿勢検出方法及び装置
【課題】2つのアンテナで航行体の姿勢を求める。
【解決手段】第1アンテナa1及び第2アンテナa2を離間して航行体1に搭載し、複数の測位用衛星S1,S2から発信された電波の各々について、第1アンテナa1及び第2アンテナa2に届く電波の位相差を算出し、各位相差から、複数の測位用衛星S1,S2と、第1アンテナa1と第2アンテナa2を結ぶ線分とがなす角をそれぞれの姿勢角として算出し、求めた複数の姿勢角θ1,θ2を合成することにより航行体1の姿勢を求める。
(もっと読む)
精度不良を検出する装置を備えるナビゲーションシステム
【課題】位置解の精度不良を検出し、保護レベルを精度よく算出する。
【解決手段】複数の送信機から複数の信号を受信するように動作することができる受信機14を有する車両用のナビゲーションシステム12は、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、この命令はプロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主航行解のための誤差共分散行列を求めること、及びパリティ空間技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
測位装置
【課題】 複数アンテナを用いたGPS測位で受信信号の合成によるNullの発生を防ぐ。
【解決手段】 機体1の外周にAアンテナ2,Bアンテナ3,Cアンテナ4が設置されており,それぞれA受信機5,B受信機6,C受信機7に接続されているものとする.各受信機は,それぞれA擬似距離11,B擬似距離12,C擬似距離13を観測値として出力する.これら擬似距離は測位演算装置14によって測位演算に用いられる.ここで,アンテナ2−4の位置ベクトルを平均値ベクトル(例えば機体の中心位置ベクトル)で近似できるものと仮定する.このとき,測位演算14で求めるべき未知パラメータの数は,平均値ベクトルの要素と,各受信機の受信機時刻誤差の計6つとなる.したがって,受信機5−7から観測される線形独立な擬似距離が6つ以上であれば,最小二乗法を用いて測位結果15を求めることができる。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる擬似距離の測定精度を考慮した重み付きDOPを算出すること。
【解決手段】本発明は、観測可能な複数の衛星10からの信号に基づいて移動体90の位置を測位する測位手段40A,40B,40Cを備える移動体測位装置1,2,3において、衛星からの信号に含まれうるノイズ量を衛星毎に推定するノイズ量推定手段70と、前記ノイズ量推定手段により推定された衛星毎のノイズ量に基づいて重み行列Rを作成し、該作成した重み行列を用いて、DOP(dilution of precision)に重み付けを行うことで、重み付きDOP(WDOP)を算出する重み付きDOP算出手段とを備えることを特徴とする。
(もっと読む)
車両測位システムおよびナビゲーション装置
【課題】より高い利便性、且つ、より高い汎用性を有しながら、初期測位時間を短縮することが可能な車両測位システムおよびナビゲーション装置を提供する。
【解決手段】車両3を輸送する輸送機器2に搭載され、輸送機器2の現在位置を検出する輸送機器位置検出装置10と、輸送機器2に搭載され、輸送機器位置検出装置10によって検出された輸送機器位置の情報を送信する近距離無線通信装置20と、を含むとともに、ナビゲーション装置30は、輸送機器2に搭載されている近距離無線通信装置20からの輸送機器位置の情報を受信する送受信機42と、送受信機42によって輸送機器位置の情報が受信されたことに基づいて、現在位置を輸送機器位置の情報が示す位置に補正する制御装置38と、を含む。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響の有無を検出し、マルチパスの影響がある場合にはその影響を低減し、測定精度を向上させること。
【解決手段】複数のGNSS衛星から送信される測位信号に基づいて位置を算出するGNSS受信装置に、測位信号に基づいて求められた擬似距離の時間特性に基づいて、該測位信号がマルチパスの影響を受けて受信されたか否かを判断するマルチパス判断手段と、測位信号がマルチパスの影響を受けて受信されたと判断された場合に、擬似距離の時間特性に基づいて、直接波の位相と反射波の位相とが等しくなるゼロ点を求める位相差ゼロ点算出手段と、測位信号に基づいて求められたドップラー周波数の積算値の時間特性と、位相ゼロ点算出手段により求められたゼロ点に基づいて、擬似距離を修正する擬似距離修正手段と、修正された擬似距離に基づいて位置を求める測位演算手段とを備えることにより達成される。
(もっと読む)
飛翔体の測位装置
【課題】飛翔体が長時間にわたって加速を続けると、信号処理の基準周波数を発生する基準発信器において加速度による周波数ドリフトが生じるという問題があった。
【解決手段】飛翔体に搭載され且つ複数のGPS衛星からの信号を受信して自己の位置を測位する飛翔体の測位装置であって、基準周波数を発生する基準発信器12と、飛翔体に生じた加速度を計測する加速度計13と、加速度計13で計測した加速度に対応する基準発信器の周波数ドリフトを算出する第1補正手段14を備え、第1補正手段14により、算出した周波数ドリフトに基づいて実際に生じた基準発信器12の周波数ドリフトをキャンセルすることで、加速度により生じる基準発信器12の周波数ドリフトを解消した。
(もっと読む)
移動体用測位装置
【課題】航法メッセージの暦データと精密暦の予報データとを適切に組み合わせて用いることで移動体の位置等を精度良く測位すること。
【解決手段】本発明の移動体用測位装置は、航法メッセージの暦データを受信する手段と、精密暦の予報データを受信する手段と、前記暦データと前記精密暦の予報データの双方を用いて衛星位置を算出する衛星位置算出手段と、前記算出された衛星位置に基づいて、移動体の位置又は速度を測位する測位手段とを備え、前記衛星位置算出手段は、前記暦データ及び前記精密暦のうちの少なくとも一方のデータの鮮度に基づいて、該鮮度に応じた重みにより前記暦データと前記精密暦の予報データを加重平均して用いることを特徴とする。
(もっと読む)
61 - 80 / 170
[ Back to top ]