
Fターム[5J062BB03]の内容
Fターム[5J062BB03]に分類される特許
41 - 60 / 170
電波発射源標定装置
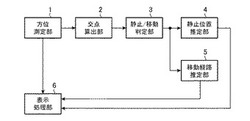
【課題】電波発射源が静止していれば、電波発射源の位置を推定して表示し、電波発射源が移動していれば、電波発射源の移動経路を推定して表示することができるようにする。
【解決手段】静止/移動判定部3により電波発射源ESが静止していると判定された場合、静止位置推定部4がヒストグラムの中で最も密度の高い座標が示す位置が、電波発射源ESが静止している位置であると推定し、静止/移動判定部3により電波発射源ESが移動していると判定された場合、移動経路推定部5が方位測定部1から出力された複数の方位線の情報と予め設定された電波発射源ESの推定位置及び推定移動速度から、電波発射源ESの移動経路を推定する。
(もっと読む)
移動体用測位装置

【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
航空機位置測定システム、受信局、航空機位置測定方法およびプログラム
【課題】複数の受信局同士の高精度の時刻同期を容易に行うこと。
【解決手段】時刻同期処理部23は、GPS衛星9から到来する信号に基づき自己の受信局11−1の時刻を他の受信局11−2〜11−5の時刻に同期させる際に、GPS衛星9から到来する信号に基づき生成されるGPS同期信号の波形の規則的な変化に基づき設定される基準点から見た受信局11−1におけるクロック源の信号波形の所定の条件を満たすゼロクロス点を基準点に一致させるようにクロック源33の信号波形の位相を調整する航空機位置測定システム1を構成する。
(もっと読む)
キネマティックGPSを活用した計器校正飛行試験方法
【課題】高高度領域の航空機の幾何高度を精密かつ簡易に測定して当該航空機の計器を校正する試験方法を提供する。
【解決手段】(3)飛行試験場所近傍に座標の確定した基準点を設け、ここと航空機の双方にK-GPS受信装置を装備する。(5)基準点の地上気圧(P0)及び地上気温(T0)を測定する。(6)航空機の幾何高度をK-GPS受信装置で計測する。(7)航空機と基準点の各幾何高度の差から求めた航空機の幾何高度(H)、地上気圧(P0)及び地上気温(T0)を次式(A)に代入して、飛行高度の大気気圧(P)を換算し、(8)大気気圧Pで航空機搭載ADCの大気気圧を校正して計測誤差等を補正する。P=P0×{1−0.0065H/(273.15+T0)}5.256…(A)
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、当該GNSS受信装置が同一のGNSS衛星からの測位信号を捕捉した状態において、直接波と反射波との間で位相差が生じるように配置される複数のアンテナと、同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、各擬似距離の差分を求める擬似距離差分計算部と、該差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、マルチパスの影響を受けていると判定された場合に、前記位置推定部により推定された位置情報を出力する位置情報出力部とを有する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、GNSS衛星からの測位信号に基づいて、測位演算を行う測位演算部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、直接波と反射波との間の経路差の変化率を推定する経路差変化率推定部と、経路差の変化率に基づいて、測位演算結果と位置推定結果との間の重み付けを設定する重み付け設定部と、設定された重み付けに従って、当該GNSS受信装置の位置を求める位置演算部とを有する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS受信装置は、測位信号に含まれるコードを用いて、該コードと該コードのレプリカ信号との相関をとり、相関値が最大とされる位相と、該位相に対して進んだ位相及び遅れた位相を求め、GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離演算部と、複数の異なる時定数により、擬似距離を搬送波の位相変化量でフィルタリングするノイズ除去部と、進んだ位相及び遅れた位相に基づいて、所定の時間間隔における進んだ位相に対応する相関値と遅れた位相に対応する相関値との間の大小関係の評価値を求める評価値算出部と、評価値に基づいて、フィルタリングされた擬似距離のうちの一つを出力する選択部とを有する。
(もっと読む)
ワイヤレス通信またはブロードキャスト・システムにおける干渉の検出、特徴化、および位置判定
広域センサ・ネットワーク(WASN)を開示する。このWASNは、広帯域ソフトウェア定義無線機(SDR)を利用して広い周波数範囲にわたってRFエネルギを監視し、重要な周波数が妨害されているまたは干渉を受けているときを検出し、干渉を排除することができるように、干渉ソースの位置を判定する。WASNは、1つ以上のジオロケーション技法を用いることができる。加えて、WASNは、不正送信を検出しその位置を判定することができ、更に正規の送信機の送信電力を推定し、これらが許可されている以上の電力を送信していないことを保証することができる。 (もっと読む)
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
複数アンテナ測位装置
【課題】受信信号の合成によって発生するアンテナゲインパターンのNullの発生を防止し、可視性の高い測位装置を得る。
【解決手段】飛しょう体に搭載された複数の受信アンテナからの受信信号を、各受信信号の信号強度により重み付けして平均した位相になるように、それぞれの相関値ベクトルの位相を回転させて一致させ、位相が揃えられたそれぞれの相関値ベクトルの合成を行い、合成された信号に基づき受信信号の追尾を行う。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、指向性を有し、該指向性を異なる方向に向けて配置される複数のアンテナと、各アンテナにより受信された同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、該擬似距離計算部により求められた各擬似距離の差分を求める擬似距離差分計算部と、該擬似距離差分計算部により求められた差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、該判定部により、マルチパスの影響を受けていると判定された擬似距離に対する重み付けを変更し、測位演算を行う測位演算部とを有する。
(もっと読む)
移動体位置測位装置
【課題】移動体の測位をより継続的且つ正確に行なうこと。
【解決手段】複数の衛星からの信号を受信する受信手段により受信された信号を観測して得られる複数の観測データの一部又は全部を選択する観測データ選択手段と、観測データ選択手段により選択された観測データに基づいて測位演算を行なう測位演算手段とを備える移動体位置測位装置であって、観測データ選択手段は、複数の観測データのそれぞれに対応する複数の誤差推定値を算出し、算出した複数の誤差推定値から、最大値と最小値の差が所定値未満であり個数が所定個数以上の誤差推定値群を抽出し、抽出した誤差推定値群のうち最も標準偏差の小さい誤差推定値群に含まれる誤差推定値に対応する衛星からの信号による観測データを選択することを特徴とする。
(もっと読む)
移動体位置測位装置
【課題】より確実且つ高精度に移動体の位置を測位すること。
【解決手段】複数の衛星からの信号を受信する受信手段と、該受信手段により受信された信号に基づき観測疑似距離を算出する観測疑似距離算出手段と、該観測疑似距離算出手段により算出された観測疑似距離に基づき、繰り返し測位演算を行なう測位演算手段と、を備える移動体位置測位装置であって、前記測位演算手段が繰り返し測位演算を行なう中で前回に測位された測位結果と衛星位置から求められる距離に、ADR(Accumulated Doppler Range)の変化量を加算して推定疑似距離を算出する推定疑似距離算出手段を備え、前記測位演算手段は、所定の場合に、前記観測疑似距離算出手段により算出された観測疑似距離に代えて前記推定疑似距離算出手段が算出した推定疑似距離を用いて測位演算を行なうことを特徴とする、移動体位置測位装置。
(もっと読む)
移動体用測位装置
【課題】高度が変化する環境下においても精度良く2次元測位を行うことができる移動体用測位装置の提供。
【解決手段】衛星からの衛星電波を移動体で受信して、該移動体の位置を測位する移動体用測位装置において、移動体の姿勢に応じて変化する座標系であって、該移動体を基準とした直交座標系を定義する座標系定義手段と、前記座標系定義手段により定義された直交座標系を用いて、3個の衛星を用いた2次元測位により前記直交座標系における移動体の位置を演算する2次元測位手段とを備えることを特徴とする。
(もっと読む)
電波による物体の検出装置および方法
【課題】宇宙由来の電波を利用して、天空に存在する物体を検出可能にする。
【解決手段】開示される電波による物体の検出装置においては、電波望遠鏡3によって、宇宙由来の電波1を受信する。電子計算機4は、電波望遠鏡3が受信した天空の位置座標ごとの電波受信レベル値を、データベース5に記憶されている同じ座標ごとの電波受信レベル値と比較して、電波受信レベル値が通常よりも小さい座標位置に物体2が宇宙由来の電波1を遮っている影があることを算出する。表示器6は、電子計算機4の計算による物体2の検出結果に基づいて、例えば、天空の位置座標ごとの電波受信レベル値の比率を、色彩や濃淡で表現して表示する。
(もっと読む)
移動体用測位システム及びGNSS受信装置
【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行う移動体用測位システムは、基準局と移動体とを有する。基準局は、固定位置に配置され、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて補正データを生成する手段と、補正データを移動体に送信する手段とを有する。移動体は、基準局から送信される補正データを受信する手段と、該移動体で観測して得られる衛星電波の観測データと、受信した補正データとに基づいて、該移動体の位置を測位する測位手段とを有する。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
衛星ナビゲーション・システムにおけるステータス・レポートの最適化方法
【課題】衛星ナビゲーション・システムにおけるステータス・レポートを最適化する方法を提供する。
【解決手段】衛星ナビゲーション・システムの通信網に関する情報を求める情報取得ステップ(S10)と、求めた前記情報を、ステータス・レポートとして、1つまたは複数のナビゲーション・メッセージを介して伝送する情報伝送ステップ(S12)とを含む。
(もっと読む)
41 - 60 / 170
[ Back to top ]