
Fターム[5J062BB03]の内容
Fターム[5J062BB03]に分類される特許
121 - 140 / 170
測位装置
【課題】受信機の簡易な構成によりマルチパスフェーディング環境下におけるマルチパス信号を排除し、安定した直接波信号の信号強度を確保した高い測位精度および高い利用性を有する測位装置を提供する。
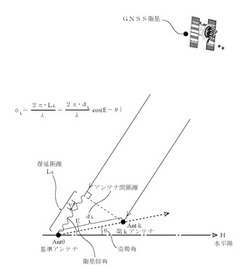
【解決手段】初期捕捉モード後の追跡モードにおいて、複数のアンテナAnt0,Ant1,・・・,Antnの内、例えばアンテナAnt0を基準アンテナAnt0とし、基準アンテナAnt0に対する送信機の位置情報ならびに基準アンテナAnt0に対する他のアンテナAntkの位置情報に基づいて、基準アンテナAnt0で受信される直接波信号と他のアンテナAntk(k=1,・・・,N)で受信される直接波信号との遅延距離Lkに対応する搬送波の位相差φkを、φk=2π*dk/λ*cos(E−θ)として求め、そのφk(k=1,・・・,N)をアンテナ毎に生成される搬送波についてのレプリカ信号に課し、そのレプリカ信号と各アンテナで受信される受信信号との相関をとることにより、直接波信号の信号強度を増幅する。
(もっと読む)
位置・姿勢推定装置

【課題】本発明の課題は、複数アンテナを使用するGNSS位置・姿勢推定装置において、装置を複雑化することなく、マルチパス誤差を軽減することにより、姿勢推定精度および位置推定精度を向上させることにある。
【解決手段】本発明の姿勢推定装置は、移動体上に複数のアンテナを搭載し、各アンテナで取得したGNSS衛星信号と装置内部で生成したレプリカ信号の相関をとる相関器において、姿勢角情報を用いて次式で計算した搬送波位相差を拘束条件として課する機能を備え、更に、従来のGNSS姿勢推定装置の機能により得られた姿勢角を初期値とし、前記の拘束条件を有する相関器を用いることにより搬送波位相のマルチパス誤差を軽減し、各アンテナにおける搬送波位相を推定して姿勢角を再度計算する手段を備えるようにした。
(もっと読む)
情報処理装置及び通信システム及び移動体誘導方法及びプログラム
【課題】無人航空機を自律的に誘導・回収する装置を得る。
【解決手段】GPS衛星15からの測位信号は、GPSアンテナ6とGPSアンテナ7でほぼ同時に受信される。気球3上のGPS受信部10から得られる擬似距離データ及び搬送波位相データは、送信部12により送信され、機体1上の受信部11によって受信される。相対航法計算部13は、受信部11により受信された気球3における擬似距離データ及び搬送波位相データとGPS受信部9から得られる機体1における擬似距離データ及び搬送波位相データを併せて相対航法演算を行い、気球3に対する機体1の相対位置及び相対速度を算出する。相対位置及び相対速度のデータは、誘導制御計算部14に送られ、この誘導制御計算部14によってケーブル2へ機体1を衝突させるための誘導制御量算出が行われる。誘導制御計算部14によって誘導された機体1はケーブル2へ衝突することで減速し、回収される。
(もっと読む)
目標対象物の位置検出装置
【課題】予め目標対象物が撮像される領域の標高データを含む地図データを必要とせず、目標対象物の3次元位置情報を容易に算出できる目標対象物の位置検出装置を提供する。
【解決手段】飛翔体10に搭載され、位置検出する対象目標物3を撮像するための撮像装置11と、飛翔体10に搭載され、撮像装置11が常に鉛直下方の地表面2を撮像すると共に、撮像される画像の向きが常に一定となるように、撮像装置11の姿勢を制御する撮像装置姿勢制御機構12と、飛翔体10に搭載され、撮像装置11の撮像に同期して撮像装置11の位置情報を出力するGPS13とを備え、撮像装置11によって撮像される目標対象物を含む複数の撮像画像と、GPS13から出力される撮像装置11の位置情報に基づいて、目標対象物の緯度、経度および高さの3次元位置情報を算出する。
(もっと読む)
性能評価システム
【課題】測位補強システムの性能評価を短時間で効率良く行う。
【解決手段】SBAS受信機24にてSBAS衛星25から受信され、ファイルサーバ22に格納されたSBASメッセージデータファイル23を用いてSBASの性能評価のシミュレーション計算を行う複数の利用者PC10−1〜10−4を有し、複数の利用者PC10−1〜10−4を用いることにより、SBASの性能評価のシミュレーション計算を分散して行う。
(もっと読む)
スペクトラム拡散パイロットを備えたGPS変換器
【課題】信頼があり、適用した場合に物体あるいは人物に対して隠蔽するに十分に小さくすることができ、かつ、敵対する人物あるいは軍隊の妨害を困難にする簡単で高価でない変換器を提供すること。
【解決手段】一つの位置で受信されたGPS信号を別の位置への地上波伝送のために異なる周波数に変換するための装置は、地上波送信器の局部発振器(56)を地上波受信器の局部発振器に位相ロックするためにスペクトラムパイロットトーンを使用する。これにより、安全性が増加し、他の方法では使用できない周波数スペクトラムの使用が可能となり、小さいコヒーレンス帯域幅でパイロットトーンとGPS信号のコヒーレンスが許容され、同じ中央周波数で変換後のGPS信号とパイロットトーンの干渉のない伝送を行うことができる。
(もっと読む)
最小限のオンボード処理による航法システム
【課題】
位置評価を与える航法システムを提供する。
【解決手段】
1つの実施例において、方法は3次元各々で加速度評価を積分することを含む。各次元の速度雑音エラーを決定するために、各次元の積分加速度評価から、各次元のGPS速度を減算する。各次元で速度雑音エラーをフィルタする。各次元の速度評価を得るために、各次元の積分加速度評価にフィルタした速度雑音エラーを加算する。各次元の積分速度評価を決定するために、各次元の速度評価を積分する。各次元の位置雑音エラーを決定するために、各次元の積分速度評価から、各次元のGPS位置を減算する。各次元の位置雑音エラーをフィルタし、各次元のフィルタされた位置雑音エラーを積分速度評価へ加算して、各次元の位置評価を得る。
(もっと読む)
電離層遅延量推定システム
【課題】GNSSの誤差源である電離層遅延量を広域にわたり高精度に推定するシステムを提供する。
【解決手段】GNSS衛星1から送信されるデータを観測する観測局を地上局2に限らず海上に対しても海上局3を設置し、各地上局2および海上局3では、GNSS信号を受信すると、ジオメトリー・フリー信号および搬送波バイアス推定値を生成し、これらの信号を中央局6に高速通信回線4またはデータ中継衛星5を経由して送信し、中央局6では、これらのデータに基づいて電離層遅延量をリアルタイムで推定し、ユーザUに送信する。
(もっと読む)
測位衛星信号捕捉方法及び衛星測位装置
【課題】 大きな位置の飛躍が成された後の電源投入時にも、迅速に測位結果が得られる測位衛星信号捕捉方法を提供する。
【解決手段】 GPS受信装置10の周囲の気圧を計測する気圧計測部15を設け、所定の要件を満たす気圧変動を検知する気圧変化判定部14を設ける。気圧変化判定部14の判定に応じ、その時々で適当と判断される衛星選択ストラテジーを選択するストラテジー選択部13を設ける。
(もっと読む)
L1/L5バイアス推定を有する広域補強システムのための方法及び装置
広域補強システム(WAAS)は、L1/L5バイアス推定を含む。L1電離層遅延及びL1電離層遅延レートの推定値を受信し、GEO勾配電離層遅延を受信し、GEO衛星のユーザ電離層垂直誤差情報を受信し、L1電離層遅延及びL1電離層遅延レートの推定値並びにGEO勾配電離層遅延からL1/L5バイアス推定値を計算する。 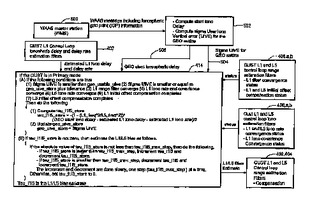 (もっと読む)
(もっと読む)
GPS受信機
【課題】 GPS信号を受信して測位演算を行うGPS受信機において、周囲の地形又は建造物の状況やGPS衛星の配置状況に応じて、より多くのGPS衛星からの電波を利用可能とする。
【解決手段】 このGPS受信機は、駆動信号に基づいてアンテナの受信角度を変更するアンテナ駆動機構と、制御信号に基づいてアンテナ駆動機構に駆動信号を供給するアンテナ駆動回路と、アンテナによってGPS信号を受信することにより得られた信号を増幅し、増幅された信号の周波数を変換して中間周波数信号を生成する高周波回路部と、高周波回路部によって生成された中間周波数信号を復調してベースバンド信号を生成し、ベースバンド信号に基づいて測位演算を行うと共に、GPS信号の受信状態に基づいてアンテナの受信方向を調整するための制御信号をアンテナ駆動回路に供給する測位演算制御部とを具備する。
(もっと読む)
障害物検知システム、障害物検知方法、プログラム
【課題】障害物を確実に検知するとともに航行者にその旨を適切に通知する。
【解決手段】 航行中にある航行体が障害物を検知すべく当該航行体に設けられる障害物検知システムにおいて、航行区域内に含まれる前記障害物の位置情報を記憶する記憶部と、人工衛星より受信した航法信号に基づいて前記航行体の現在位置を検出する位置検出部と、前記検出された航行体の現在位置に基づいて前記記憶部より現在の前記航行体の近傍に位置する前記障害物を検索する障害物検索部と、当該障害物が検索された場合に警報を出力する警報出力部と、を有する。
(もっと読む)
測位システム
【課題】高速測位システムにおいて、コストアップとなる他の推測航法センサを必要とせず、基準測位タイミングから移動体の速度の変化があった場合でも、正確な測位位置を高速に求めること。
【解決手段】基準測位タイミングにおける基準測位位置を追尾情報に基づいて求める基準測位位置演算装置と、搬送波積算位相計測装置から得られる各衛星信号の搬送波積算位相の経過時間中の変化に基づいて、経過時間内の各時刻の移動量を計算する移動量演算装置とを用い、基準測位タイミング内での測位を正確に得る。
(もっと読む)
測位システム
【課題】測位精度の向上を図った測位システムを提供すること。
【解決手段】ユーザ装置3から伝送される測位衛星の観測データを用いて、基準局装置2の衛星信号受信機211〜21nごとにキネマティック測位を行ってユーザアンテナ位置を決定する。さらに、基準局装置2からユーザ装置3へ、基準局装置2で観測した測位衛星データを伝送し、ユーザ装置3でも独自にキネマティック測位を行う。それぞれ独立してアンビギュィティを解き、それぞれユーザ装置3のキネマティック測位位置を計算する。ユーザ装置3の測位結果は、基準局装置2へ伝送する。基準局装置2で求めた複数のユーザアンテナ位置結果と、ユーザ装置3から伝送されてきたアンテナ位置結果とを比較し、ユーザ測位結果の妥当性を確かめるようにする。
(もっと読む)
可動物体、特に空港での航空機の地上位置を決定するための方法および装置
本発明は、位置データを周期的に発生するための手段(2)と、慣性データを発生するための手段(3)と、位置データの発生毎にこの位置データに基づき可動物体の位置を決定するための手段(4)と、位置データの2回の連続発生間での可動物体の位置を決定するための手段(5)とからなる装置(1)に関し、上記の2回の連続データ発生間の時隔が、中間時間のより分離される、同じ長さの時間範囲に分割され、上記の手段(5)が、各現在の中間時間に対し、以前の中間時間におけるその位置と、現在と以前の中間時間により形成される時間範囲中のその移動とに基づいて可動物体の位置を決定し、その物体の移動が慣性データにより計算される。 (もっと読む)
空港内で航空機の地上運航を補助するための装置
本発明は、航空機の現在位置を決定するための手段(2)と、地図製作データベース(3)と、運航システム(4)と、航空機の現在の方向を決定するための手段(9)と、監視スクリーン(8)上に少なくとも空港の一部の地図と、その地図上に、前記現在位置に対応する個所に位置し、現在の進行方向を指し示す航空機のシンボルとを表示する表示システム(6)とからなる装置(1)に関するものである。 (もっと読む)
GPSR多周計測型電離層遅延補正装置、GPSR多周計測型電離層遅延補正方法及びプログラム
【課題】 2周波に限定せず多周波を用いたGPS信号に関する擬似距離の算出において、電離層の影響を簡単かつ精度良く補正し、ノイズに対する耐力も有するGPS電離層遅延補正機構を提供する。
【解決手段】 多周波の観測量としての擬似レンジデータに基づいて電離層遅延係数を推定し、その推定した電離層遅延係数を用いて、電離層遅延補正を行った擬似レンジデータを生成する電離層遅延補正部9を有する構成として構築する。GPS受信機或いは測位ツールで計測した多周波の観測量として測定した擬似レンジデータを収得し、その擬似レンジデータに基づいて電離層遅延係数を推定する。次に、前記推定した電離層遅延係数を用いて、電離層遅延補正を行った擬似レンジデータを生成する。
(もっと読む)
移動体端末用アンテナ追尾装置および移動体端末用アンテナ追尾方法
【課題】指向性可変アンテナを容易に通信衛星へ指向させることが出来る移動体端末用アンテナ追尾装置および移動体端末用アンテナ追尾方法を提供する。
【解決手段】準天頂衛星が配信する端末制御情報は、地球上の各地点から見た準天頂衛星の方角情報を含んでいる。GPS受信部22は、移動体端末10の現在位置を検出し、指向性制御部28はまず、フェーズドアレイアンテナ11の指向性を比較的広く制御する。端末制御情報受信部23は、フェーズドアレイアンテナ11を介して端末制御情報を受信し、姿勢角センサ25および方位センサ26は、移動体端末10の3次元の姿勢角を検出し、アレイファクタ計算部27は、端末制御情報に姿勢角分の補正を施して、アレイファクタ情報をアレイファクタ記憶部21から検索する。指向性制御部28は、補正された指向性制御情報を基にフェーズドアレイアンテナ11の指向性をより狭く制御し準天頂衛星へ指向させる。
(もっと読む)
位置測定システム
【課題】 切り立った山に囲まれたダムのような人工衛星からの電波が直接受信できない領域を移動体が移動する場合も、簡単な構造であるにもかかわらず、GPSを用いて正確に測定することができるようにする。
【解決手段】 移動体20と、そして、GPS機能を備えた飛行体30とを含んで構成されてなるGPSを用いた位置測定システムであって、飛行体30は、移動装置と、移動体との相対位置を計算可能な移動体位置計測装置32−34と、及び、移動体位置計測装置によって計測した位置データを移動体に送信する送信装置36とを有しており、移動体20は、飛行体30から送信される位置データを受信する受信装置と、及び、受信した位置データを保存する記録装置とを有している。
(もっと読む)
ワイヤレス・デバイスの場所特定のために、位置検出精度を高め、リアル・タイム・オーバーヘッド画像を用いるための、移動および/または航空機搭載センサによる商用ワイヤレス位置検出システム(WLS)の改善
移動体LMUをワイヤレス位置検出システムにおいて用い、適当な受信機カバレッジを欠く区域において、検出カバレッジを設ける。移動体LMUは、ワイヤレス・ハンドセットおよびデバイスからの無線周波数(RF)送信をある時間期間にわたって検出し、これらの場所の判定を可能とするために用いることができる。移動体LMUの時間、位置、および速度を計算し、ワイヤレス・デバイスから受信したあらゆる送信と共に、SMLCに送信する。SMLCは、ワイヤレス・デバイスのドプラ成分を分析および解明しつつ、移動体LMUのドプラ成分を補償する。ワイヤレス・デバイスの位置および速度は、移動体LMUプラットフォームが撮影したリアル・タイム画像と比較して、ワイヤレス・デバイスの場所を高精度に判定することができる。非常に微弱であるおよび/またはノイズによって変転している可能性がある対象信号を検出する移動体LMUの能力を改善するために、低電力の移動体端末の信号を、受信サイトにおいて受信しメモリに格納するプロセスを採用することができる。次いで、SOIよりも強力な複製を、後の時点においてネットワーク・コントローラまたはBTSから受信し、これを用いて、メモリにおけるSOIの相関処理を改善する。 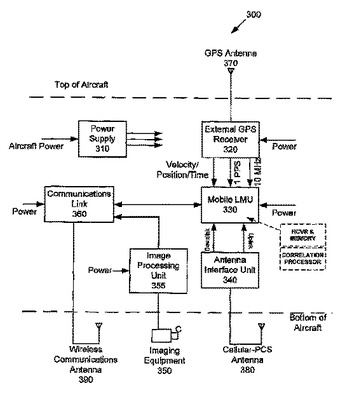 (もっと読む)
(もっと読む)
121 - 140 / 170
[ Back to top ]