
Fターム[5J062BB03]の内容
Fターム[5J062BB03]に分類される特許
141 - 160 / 170
GPS衛星用基準局システム

【課題】 高高度移動体の位置決定に影響する周囲環境等の排除を図る。
【解決手段】 3つのレーザ測距基地局16a等からGPS衛星用基準局12の再帰反射体14に向けて測距用レーザを放射し、その測距用レーザの再帰反射により各レーザ測距基地局16a等に到達した測距用レーザを検出してレーザ測距基地局毎のレーザ測距基地局16a等と再帰反射体14との間の距離を算出し、これら3つの距離に基づいて再帰反射体14の位置を決定し、そしてこの位置と、再帰反射体14とGPS受信アンテナ20との相対的な位置と、姿勢センサ22の姿勢情報とに基づいてGPS受信アンテナ20の位置を決定する。
(もっと読む)
方探システム

【課題】 従来の複数センサを用いた方法において、遠方からの発信源の到来方向を測定する場合、センサのビーム幅に応じた観測誤差が生じてしまう。
【解決手段】 方探センサ1が取り付けられたプラットフォーム2を高高度に2つ以上位置させ、方探センサの間隔を広く配置して、不審電波を探知するために方探センサ1を発信源3に対して指向させる。各方探センサ1により探知された発信源3の到来方向及び位置情報は解析装置4へと出力し、方探センサ1を搭載したプラットフォーム2は高度に位置しており、発信源3からの電波を受信する距離方向の領域は、センサの垂直方向のビーム幅に依存する。
よって、距離方向の観測領域を精度良く特定することができ、各方探センサ1の位置、信号の到来方向及び観測領域から交差する点を測定することにより、遠方の発信源3の位置を特定することができる。
(もっと読む)
GPS受信機およびGPS受信機の測位方法
【課題】測位感度や測位スピードなどの性能を劣化させること無く、レンジの計算に必要となるレンジデータを周期的に取得でき、かつ、消費電力の省力化をも実現する。
【解決手段】周波数変換部4からのIFデータに対して、同期保持部6はキャリア周波数の同期、C/Aコードの位相同期を捕捉して保持し、レンジデータなどの必要な情報を取得する。レンジデータを取得した場合には、制御部7は、スイッチ23をオフにして同期保持部6への電源の供給を停止し、取得したレンジデータなどを用いて測位演算を行い、現在位置を示す測位情報を求めてこれを出力するが、測位情報の出力周期と、測位情報を求めるのにかかる時間に応じて、同期保持部6を停止させる時間を制御する。
(もっと読む)
移動体の測位方法及びその測位装置
【課題】 監視区域がマルチパスの発生しやすい電波障害物の多い区域においても高精度の測位が可能な移動体の測位方法及びその測位装置を提供すること。
【解決手段】 監視区域内に位置する移動体から送信された信号を、複数の地上局でそれぞれ受信し、主処理装置に伝送し、主処理装置では、この各RF信号が複数の地上局でそれぞれ受信された受信時刻を求め、地上局毎に求めた受信時刻から、移動体から地上局迄の信号の到達時間を求め、2つの地上局間毎の到達時間差を求め、移動体の位置情報を求める。さらに、主処理装置は少なくとも1つの地上局が受信したRF信号の受信時刻を基準にして各地上局の配置関係から、その他の地上局で受信したであろうRF信号の受信時刻が存在する存在時間範囲を求め、この存在時間範囲内にあるその他の地上局からのRF信号の受信時刻を検索し、この検索したその他の地上局からのRF信号の受信時刻を求める。
(もっと読む)
サイクルスリップ検出装置及びサイクルスリップ検出方法
【課題】サイクルスリップの検出ならびにサイクルスリップが発生している人工衛星の特定を効率的且つ確実に行うことが可能なサイクルスリップ検出装置及びサイクルスリップ検出方法を提供する。
【解決手段】人工衛星2aと人工衛星2bのそれぞれにおけるキャリア位相加速度と加速度平均値との差分と、これらの差分の差である人工衛星差分差とを求める演算部と8と、この人工衛星差分差と所定の閾値とを比較し、人工衛星差分差が閾値より大である場合に人工衛星2a及び2bのそれぞれにおける差分と所定の閾値とを比較し、差分が前記の閾値より大である人工衛星にサイクルスリップが発生していると判定する判定部9とを設ける。
(もっと読む)
ナビゲーションシステムの予想性能の決定
一態様では、ナビゲーション補強システムの予測性能を決定する方法は、ナビゲーション補強システムの標準性能を決定すること、及び標準性能を決定することに基づいてナビゲーション補強システムの予測性能を決定することを含む。別の態様では、ナビゲーション補強システムの予測性能を決定するシステムは、ナビゲーション補強システムの標準性能を決定する長期モニタ及びナビゲーション補強システムの標準性能に基づいてナビゲーション補強システムの予測性能を決定する短期モニタを備える。 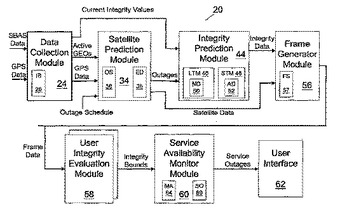 (もっと読む)
(もっと読む)
サイクルスリップ検出装置及びサイクルスリップ検出方法
【課題】効率的且つ確実にサイクルスリップを検出することが可能なサイクルスリップ検出装置及びサイクルスリップ検出方法を提供する。
【解決手段】人工衛星2aの過去におけるキャリア位相をn次の方程式により最小二乗近似し、これにより未来時刻におけるキャリア位相を推定し、推定されたキャリア位相と、前記の時刻におけるキャリア位相の実測値との差分を求め、この差分と所定の閾値とを比較し、差分が閾値より大である場合に別の人工衛星2bについても同様の処理を行う演算部8と、これにより求められた差分が閾値以下である場合にサイクルスリップが発生していると判定する判定部9とを設ける。
(もっと読む)
乱気流を遠隔的に測定するシステム
乱気流を検知するシステム及び方法は、数台の移動プラットフォームと、移動プラットフォーム速度センサと、数台の電磁エネルギー送信器及び受信器とを含む。受信器は、送信器によって送信されたエネルギーを、乱気流を被る経路沿いに進んだ後に、受信する。受信器は、乱気流によって生じるエネルギーの変化を検知し、(送信器または受信器のいずれかが配置された)移動プラットフォームの速度の効果を変化から選別する。加えてシステムは、の3次元モデルを作成できる。別の実施形態において、本発明は移動プラットフォームを使って乱気流を検知する方法を提供する。方法は、乱気流を被る経路に沿って進んだ電磁エネルギーを受信することと、乱気流によって生じたエネルギーの変化を判定することとを含む。好ましくは受信器が配置される移動プラットフォームの速度の効果は変化から選別される。  (もっと読む)
(もっと読む)
航空機位置検知装置及びその方法
【課題】安価な装置で確実に航空機の位置を検知できる航空機位置検知装置を提供することにある。
【解決手段】GPS信号を受信するアンテナ10と、GPS信号の受信強度に基づいて移動体の存在を検知する移動体有無検知部7と、移動体から発せられる振動を検知する振動センサ13と、振動信号に基づいて移動体が航空機であると判定する移動体種別判定部9を備える。
(もっと読む)
カメラの位置及び姿勢情報補正方法及びその装置
【課題】カメラに装着された3ラインスキャナーを介して得られる画像情報を分析し、カメラの位置と姿勢情報とを精密に補正できるようにする方法及び装置を提供すること。
【解決手段】衛星航法装置を用いてカメラの位置を計算するステップと、慣性航法装置を用いてカメラの姿勢を計算するステップと、カメラに装着された3ラインスキャナーを介して入力される画像を分析し、カメラの位置及び姿勢補正情報を生成するステップと、生成された位置及び姿勢補正情報をそれぞれ衛星航法装置と慣性航法装置とにフィードバックするステップとを有する。3ラインスキャナーを介して入力される画像は、前方スキャナー観測画像、直下スキャナー観測画像及び後方スキャナー観測画像とから構成される。人工衛星や航空機、車両などの輸送手段に搭載されたカメラを介して観測された画像に対し、地上基準点を使用しなくともカメラの外部標定要素を精密に決めることができる。
(もっと読む)
MEMSを使用することにより移動電話におけるGPS信号処理を改善するシステムおよび方法
受信器Rが移動端末Uの位置に関係する衛星からデータを取得する衛星Sのコンステレーションを有する衛星測位システム内のユーザ移動端末Uで使用される受信器R。MEMS装置Mは、受信器Rに組み込まれ、移動端末Uの速度の絶対値計算式Iを検出し、続いて上記の値を受信器Uに提供するように構成される。移動端末の速度のベクトル成分(Vux、Vuy、Vuz)に対応する値を、受信器Rによってまたは受信器Rの代わりに計算する手段が提供され、このことは、ユーザ速度に関係するドップラー効果が得られることを可能にする。  (もっと読む)
(もっと読む)
物体の方位および姿勢検出装置
【課題】 フレームを用いて複数のアンテナをユニット化する必要がなく、複数のアンテナを水平面上に設置しなければならないといった設置条件を無くし、さらに通常の運用状態で短時間のうちに起動して物体の方位および姿勢を求められるようにする。
【解決手段】 船舶1の所定位置にアンテナA0,A1,A2を設置した後の初期処理で、基準アンテナA0に対する他のアンテナA1,A2の相対位置をRTK法により求めるとともに、基準アンテナA0に対するアンテナA1,A2までの距離をアンテナの配置関係として求めて保存する。その後の通常処理では、RTKなどによる相対測位によりアンテナA0,A1,A2の相対位置関係を求め、この相対位置とアンテナの配置関係に基づいて船舶の方位角および姿勢角を算出する。
(もっと読む)
波源探索装置および波源探索方法
【課題】探索作業者に探索対象の位置を示す明確な指標を与えることが可能な波源探索装置およびこの波源探索装置を用い、監視対象の地域を自由に変更することが可能な波源探索方法を提供する。
【解決手段】波動信号を受信するアンテナと、アンテナに到来した波動信号の波源の方向を示す情報を含む位置推定情報を出力する観測手段と、観測手段によって得られた位置推定情報に基づいて、波源の位置を示す目視可能な指標を提供する指標提供手段とを備えて波源探索装置を構成する。このような波源探索装置を移動体に搭載し、観測指示に応じて、波源探索装置に備えられた観測手段による観測動作を実行させる観測実行ステップと、得られた観測結果に対応して、波源探索装置に備えられた指標提供手段によって波動信号の波源の位置に関する指標を移動体の操縦者に提供することにより、移動体を進めるべき針路を決定する作業を支援する針路決定支援ステップとを備えて波源探索方法を構成する。
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 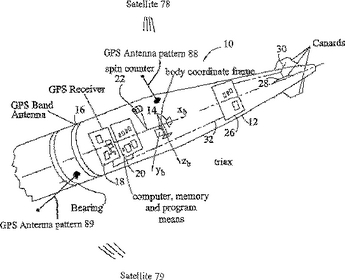 (もっと読む)
(もっと読む)
二重冗長GPSを用いて妨害を防止する航空機の航行システム
【課題】
【解決手段】本発明は、無人の航空機の航行システムである。航行システムは、地球上の位置探査システムの信号を受信する第1のアンテナと、第1のアンテナに接続されて、第1の干渉抑制技術を用いて、地球上の位置探査システムの信号の干渉を抑制する第1の干渉抑制ユニットと、第1の干渉抑制ユニットから信号を受信する第1の航行ユニットと、地球上の位置探査システムの信号を受信する第2のアンテナと、第2のアンテナに接続されて、第2の干渉抑制技術を用いて、地球上の位置探査システムの信号の干渉を抑制する第2の干渉抑制ユニットと、第2の干渉抑制ユニットから信号を受信する第2の航行ユニットとを具えている。該装置によって実行される航空機の航行を制御する方法も、本発明に含まれる。  (もっと読む)
(もっと読む)
供給支援システム及び支援装置及び空中給油支援システム及び位置送信装置
【課題】 位置情報を用いることにより空中給油においてブーム及び給油ホースを制御し、空中給油を短時間に行うシステムの提供を目的とする。
【解決手段】ブーム4と給油ホース3とから構成される供給経路部30を使用して、タンカー航空機1から被給油航空機2へ空中給油を行う。被給油航空機GPSデータ受信部7は、被給油航空機2に設置され、人工衛星501等の送信する測位情報を受信し、被給油航空機2への自己の設置位置を示す第1位置を検出する。タンカー航空機GPSデータ受信部6は、タンカー航空機1に設置され、人工衛星501等の送信する測位情報を受信し、タンカー航空機1への自己の設置位置を示す第2位置を検出する。支援装置100は第1位置と第2位置とを入力し、入力した第1位置と第2位置とに基づき、空中給油する場合のブーム4の方位と、給油ホース3の繰り出し量とを算出する。
(もっと読む)
ナビゲーション用途のための、改良されたGPS累積デルタ距離処理方法
移動物体の位置と速度の測定に使用されるGPSナビゲーション技術において、擬似距離(PR)測定値および累積デルタ距離(ADR)測定値が、物体において受信GPS信号から生成される。ナビゲーションパラメータ(例えば位置、速度、クロック)はPR測定値、およびADR測定値の間の差から推定される。本明細書で述べるADR測定式は、よりいっそう精密な方法で公式化され、ADR測定値の間の差を計算する時間間隔は、現在のGPS用途のADR差分手法で使用されるものよりもはるかに大きい。故にADRの差はより正確であり、非常に精密なナビゲーションソリューションを生じる。ADR差分手法はカルマンフィルター処理の収束時間短縮に寄与し、宇宙飛行体のナビゲーション精度を向上する。これらの高精度なADR処理アルゴリズムを統合型GPS/IMUナビゲーション用途に拡げるための技術も提供される。  (もっと読む)
(もっと読む)
衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステム
本発明は、ユーザの位置を決定するために、衛星(SAT1−GPSEE1〜ASATn−GPSEEn)から送信される、異なる3つの周波数の三搬送波電波信号を用いて移動体(SUR)の位置を特定するリアルタイムナビゲーションの方法に関する。方法は、エクストラワイドレーン搬送波位相曖昧さを決定する第1のステップと、長経路位相曖昧さを推定する第2のステップと、複数の周波数のうちの1つの位相曖昧さを決定する第3のステップとを含む。追加ステップの1つでは、第3のステップの間に電離層補正をリアルタイムで適用する。前記電離層補正は、地上固定基準局(REF−REFE)によって計算される前記電離層の常時更新される電離層モデルに基づき、いわゆるマスタ地上固定基準局(REFM−REFME)によって計算される測地データと組み合わせられる。本発明は、前記方法を実施するためのシステムにも関する。  (もっと読む)
(もっと読む)
衛星を用いた測位方法、測位プログラム、及びGPS受信装置
【課題】 高精度な測位をリアルタイムに行うとともに、連続的に測位結果を出力する。
【解決手段】 DGPSにより仮の解を導出し、導出した仮の解の情報を用いて、真の解が存在する第1の空間領域を求める。第1の空間領域を線形写像した第2の空間領域内に存在する所定の解を真の解となりうる解候補とし、解候補のそれぞれについて、χ二乗検定を行う。χ二乗検定の結果、解候補が1つに限定された場合に、限定された解候補を真の解し、真の解から整数サイクルを得る。
(もっと読む)
飛翔体
【課題】飛翔体の機体の機軸回りに対する指向性利得はもとより、飛翔体の機体の前後方向の指向性利得をも確保して、ランチャ搭載時の姿勢を含めていかなる飛翔姿勢においてもGPS信号を受信することができる飛翔体搭載用アンテナ装置を提供する。
【解決手段】高速で機軸P回りに回転する飛翔体1に搭載するアンテナ装置10であって、導線を折り返して形成されて長尺平行2本線部12及びこの長尺平行2本線部12と直交する短尺平行2本線部13を有するL字形折り返しアンテナ11と、グランド板14を備え、L字形折り返しアンテナ11の長尺平行2本線部12を飛翔体1の機軸Pに沿わせた状態で短尺平行2本線部13を飛翔体1の機体2の先端面2aに固定して飛翔体1の給電部4に接続すると共に、グランド板14を飛翔体1の機軸Pに沿わせた状態で且つL字形折り返しアンテナ11の短尺平行2本線部13と直交して接触させた状態で固定する。
(もっと読む)
141 - 160 / 170
[ Back to top ]