
Fターム[5J062BB05]の内容
Fターム[5J062BB05]に分類される特許
281 - 300 / 1,013
動き監視システム
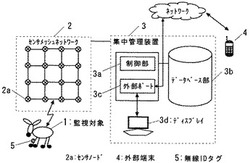
【課題】監視エリアが広範囲、対象物が複数になると比較対象となるデータ量が増加する。
【解決手段】監視対象1に取り付けた無線IDタグ5は一定時間毎にパイロット信号を送信する。監視エリアに亘りメッシュ状に配置センサメッシュネットワーク2を構成するセンサノード2aは、パイロット信号を受信して受信レベルおよびID情報を自己のIPアドレスと共に送信する。集中管理装置3は、各センサノード2aから送信されてくる情報を処理して監視対象1の位置を測定する。そして、集中管理装置3は、センサノード2aにおける送受信を停止させるためのスリープモードと、センサノードにおける送受信を機能させるための測定モードを受信レベルに応じて各センサノード2aに設定する。
(もっと読む)
衛星からの測位データを用いた測位方法及び測位装置

【課題】測位の精度を向上させる。さらに、装置の低コスト化を実現する。
【解決手段】以下のステップを備える:
(1)測位データを供給する複数の衛星でそれぞれ構成される複数の組を用いて、複数の仮想測位点を算出するステップ;
(2)前記複数の仮想測位点から、第1空間中心を算出するステップ;
(3)前記各仮想測位点について、前記第1空間中心からの外れ距離を算出するステップ;
(4)前記外れ距離に対する、前記各衛星の責任量を算出するステップ;
(5)前記責任量が基準値以上である前記衛星(以後「マルチパス衛星」という)を判別するステップ;
(6)前記マルチパス衛星が関与する仮想測位点を除いた、前記仮想測位点を用いることにより、受信位置を算出して出力するステップ。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
ジオポジショニングおよびローカルモードを実行する位置追跡
【課題】無線装置が、遠距離位置追跡を可能にするためのジオロケーションおよび局所的位置追跡を可能にするための局所的位置技術を利用することにより、目標物に関する位置データを提供する。
【解決手段】ジオロケーションおよび局所的位置技術は、位置追跡装置および位置追跡される装置の両方に、同時にまたは個別に組み込まれてよく、必要に応じて再構成され得る。位置追跡される無線装置は、マルチユーザー無線加入者ネットワークと通信することができる無線通信回路を含む。ジオロケーション読取回路がGPSまたは類似の位置データを提供する。このジオロケーション読取回路はまた、目標物に関するジオロケーションデータを取得することができる。局所的位置検出装置が局所的位置データを構文解析し、ジオロケーションデータに基づいてジオロケーションの指示が提供される。この局所的位置検出装置はさらに、局所的位置データを用いてジオロケーションデータを修正するときに使用される局所的位置データに応答する。
(もっと読む)
壊滅的な構造物倒壊の際に電子デバイス群を利用して生存者の位置を特定するシステム及び方法
本発明は、人工構造物の倒壊後に生存者の位置を特定するシステム及び方法を提供する。無線送信機を備える複数の電子デバイスが構造物内に分散配置される。これらのデバイスはネットワークへと自己編成し、電子デバイスのうちの少なくとも1つの既知の位置を用いて電子デバイスの互いに対する3次元の位置を記録する。構造物が倒壊すると、少なくとも1つの付加的な電子デバイスをネットワークに導入し、付加的な電子デバイスの既知の位置を用いて電子デバイスの位置を再計算する。倒壊後、再計算された電子デバイスの位置を用いて生存者の可能性のある位置が求められる。 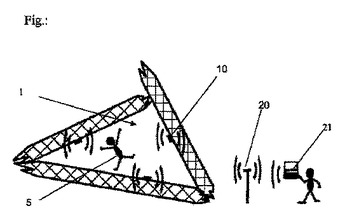 (もっと読む)
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
不連続衛星測位システム追跡における搬送波位相処理
探索の不連続の後、衛星測位システム信号の初期サンプリングを利用してコモンコード位相オフセットと、擬似レンジレートと、位置計算のモードとを決定する、位置判断のための装置、システムおよび方法が開示される。 (もっと読む)
広帯域相互関係モード切換方法及び装置
【解決手段】 方法と装置は、波形相関結果処理を実行することを動作可能に有効にする機器ために提供される。 (もっと読む)
後処理を用いるリアルタイム・データ(Real−TimeDataWithPost−Processing)
本明細書で開示される主題は、航法解を求める及び/又は予測することに関係する。 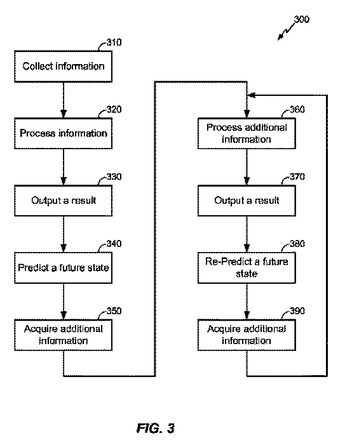 (もっと読む)
(もっと読む)
無線カバレッジセル識別子の衝突の検出
追加情報が測位基準信号に含まれ、または追加情報を使用して測位基準信号を生成し、2つ以上の基地局に関連付けられた2つの異なるセルどうしのセル識別子「衝突」の検出を可能にする。1つの例示的実施形態では、ユーザ機器端末は、追加情報を使用して衝突を検出する。追加情報は、2つ以上の基地局によって送信される測位基準信号に含まれるか、またはそのような追加情報を使用してそのような測位基準信号を生成する。ユーザ機器端末は、衝突をネットワークに報告し、ネットワークは、衝突しているセルの一方に異なるセル識別子を割り当てることによって衝突を解決する。 (もっと読む)
無線電話ネットワークの移動局のジオロケーション
移動局が動作する無線電話セルラネットワークによってカバーされる所定エリア内の移動局を位置決めする方法に関する。当該方法は、ネットワークの少なくとも7個の異なる通信チャネルに関する受信電力(PLx)を測定するために移動局を使用する工程(ステップ200)と、当該測定と、チャネルに関する受信電力レベルとカバーエリア内の位置との間の対応の関連所定情報と、に従って当該移動局を位置決めする(ステップ210)工程とを備える。当該所定情報は、異なる位置(Li)でチャネルに関して前もって測定され、データベース(BD1)に格納された電力レベル(PLiMj)を含み得、その場合移動局は、測定(PLx)と、データベース(BD1)のコンテンツとを比較することによって位置決めされる。当該方法によれば建物内であってもより良好な精度での位置決めが可能になる。  (もっと読む)
(もっと読む)
認証システム及び認証方法
【課題】安全性の高い位置認証方法を提案すること。
【解決手段】認証システム1において、擬似衛星4は、企業内に設けられたアクセス許可エリアに配置され、自身の配置位置と認証IDとを含む擬似衛星信号を発信する。ノート型パソコン2は、擬似衛星4から擬似衛星信号を受信した場合に、当該擬似衛星信号に含まれる配置位置と認証IDとを含む認証依頼信号を認証サーバー5に送信する。認証サーバー5は、ノート型パソコン2から受信した認証依頼信号に含まれる配置位置が対応付けられた認証IDデータに記憶されている現在有効期間内の認証IDと、受信した認証依頼信号に含まれる認証IDとを照合することで、ノート型パソコン2がアクセス許可エリア内に現在位置しているか否かの認証処理を実行する。そして、認証処理により承認した場合は、企業内システム6をノート型パソコン2に接続するように制御する。
(もっと読む)
位置情報確定方法、装置及びシステム
従来の無線センサーノードの位置情報確定方法における欠陥を回避できる、位置情報確定方法、装置及びシステムである。そのうち、本発明に開示された位置情報確定方法は無線センサーネットワークに応用され、前記ネットワークにおける通信ネットワークノードの現在位置情報を取得するステップと、取得された位置情報を前記通信ネットワークノードにサービスデータを提供する無線センサーノードの現在位置情報として確定するステップとを含む。 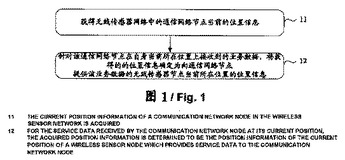 (もっと読む)
(もっと読む)
測位装置、測位方法、プログラム
【課題】GPSの測位処理による電力消費量を削減する。
【解決手段】測位装置の外環境として気温、明るさを測定し、これらの外環境要素について一定以上の変化があった場合において、GPSの測位処理を実行させる。これにより、測位処理を実行した際には、相応に高確率で位置情報が取得でき、かつ、測位処理の実行機会は必要最小限にとどめることができる。
(もっと読む)
行動推定装置、行動推定方法、及び行動推定プログラム
【課題】位置情報の精度を低下させることなく携帯端末のバッテリー消費を抑える。
【解決手段】第1の時間間隔で測定される位置情報を前記第1の時間間隔より長い時間間隔である第2の時間間隔で一括して取得するデータ通信装置105と、データ通信装置105により取得された位置情報を蓄積する位置情報蓄積部106と、位置情報蓄積部106に蓄積された一定期間の位置情報を解析することにより速度ベクトルを生成する速度ベクトル生成部107と、速度ベクトル生成部107により生成された速度ベクトル付きの地図を蓄積する地図蓄積部108と、データ通信装置105により取得された最新の位置情報と地図蓄積部108に蓄積された地図とに基づいて、次にデータ通信装置105により位置情報が取得されるまでの間の位置を前記第2の時間間隔よりも短い時間間隔で推定する推定部109とを備える。
(もっと読む)
電子機器
【課題】電波の発信が禁止されている場所でのGPSモジュールによる情報取得を制限すること。
【解決手段】サブCPU107は、GPS情報の更新方法が「自動」に設定されている場合には、通信禁止電波を受信している間は、GPSモジュール110への電源供給を禁止することによって、GPSモジュール110の電源オンを禁止する。
(もっと読む)
非接触入力処理システム、その制御方法及び制御プログラム
【課題】マウスによる動作入力を、マウスを用いずに簡易に実現可能な非接触入力処理システム、その制御方法及び制御プログラムを提供する。
【解決手段】データ処理装置130のICタグ識別情報取得手段131が、ICタグ110の識別情報を取得する。電界強度取得手段133は、ICタグ110の電界強度を識別情報に対応付けて取得する。適正座標演算手段137は、ICタグ110の識別情報と各ICタグ110の電界強度と、から3次元座標エリア上におけるICタグ110の適正座標を演算する。マウス動作識別手段138は、ICタグ110の識別情報と電界強度とその状態の維持時間と、の関係を、マウス情報登録手段135により登録された各種マウス動作情報と照合することで、マウス動作を識別する。
(もっと読む)
位置推定システム
【課題】マルチパスの影響を受けることなく、また赤外線投光部や赤外線受光部を設けることなく、高精度に移動体の現在位置を推定する。
【解決手段】位置推定対象エリア1を小区画に区切ったセルCL毎にタグ受信機3および人感センサ4を設ける。人Xに無線タグTGXを所持させ、人Yに無線タグTGYを所持させる。無線タグTGX,TGYは識別情報IDX,IDYが付された電波を発する。人感センサ4が検出するセルCL毎の人の在不在を示す情報を位置推定装置2へ送る。タグ受信機3で検出される識別情報が付された電波の強度を位置推定装置2へ送る。位置推定装置2は、人感センサ4が検出するセルCL毎の人の在不在の検出結果をマップA、タグ受信機3が検出するセルCL毎の同一の識別情報が付された電波の強度をマップB、マップAとマップBのセルCL毎のアンド情報をマップCとし、マップA,B,Cを用いて、位置推定対象エリア1に位置する人X,人Yの現在位置を推定する。
(もっと読む)
屋内送信機、位置情報提供システム、情報管理装置、および、コンピュータを情報管理装置として機能させるためのプログラム
【課題】測位のための信号を発信する衛星の時刻と間での時刻の同期が容易な信号に基づいて位置情報を送信できる屋内送信機を提供する。
【解決手段】クロック・パルス生成部2100から発せられたタイミングパルスは伝送遅延量測定部2102とタイミング遅延回路2104に入力される。伝送遅延量測定部2102は、リターンパルスが来るまでカウントする。タイミング遅延回路2104に入力されたパルスは、0遅延のまま差動ドライバ2108に入力され、屋内送信機200−1へ伝送される。このタイミングパルスにより、屋内送信機200−1のクロック生成ブロックが同期する。屋内送信機200−1は、タイミングパルスを差動レシーバ2106へ伝送し、伝送遅延量測定部2102で測定した値を1クロック分の遅延量に変換し、タイミング遅延回路2104へ入力し、Δtが最小になるように負帰還を構成する。
(もっと読む)
位置情報提供方法、位置情報提供システムおよび位置情報提供サーバ
【課題】
位置情報受信機が移動している場合、位置情報受信機が位置情報を取得する前に位置情報送信機の位置情報提供範囲を通過してしまい、位置情報を取得できないおそれがある。
【解決手段】
信号受信機は、信号送信機から送信された信号送信機の識別情報を受信し、受信した識別情報を位置情報提供サーバへ送信し、位置情報提供サーバは、信号受信機から送信された信号送信機の識別情報から信号送信機の近隣に存在する複数の信号送信機の符号パターン、周波数情報および優先順位を含む情報を信号受信機へ送信し、信号受信機は、位置情報提供サーバから送信された優先順位、符号パターンまたは周波数を用いて近隣に存在する複数の信号送信機のうちの1つの信号送信機から信号を受信する。
(もっと読む)
281 - 300 / 1,013
[ Back to top ]