
Fターム[5J062BB05]の内容
Fターム[5J062BB05]に分類される特許
301 - 320 / 1,013
地物画像表示装置、地物画像表示方法、地物画像表示プログラム、位置検出装置、位置検出方法、位置検出プログラム及び地物図面データ

【課題】地物を立体的に表現することで、被監視体の把握が容易で、かつ被監視体の位置を正確に把握することができる地物画像表示装置、地物画像表示方法、地物画像表示プログラム、位置検出装置、位置検出方法、位置検出プログラム及び地物図面データを提供する。
【解決手段】救助活動支援装置は、建物の各階の見取図G1〜G4を示す平面図データに、平面図データ上の2点を位置基準点として、位置基準点の経度及び緯度を示すXY座標データ、及び平面図データの高さ位置を示すZ座標データが関連付けられて記憶手段に格納されており、この各階の平面図データを、XY座標データ及びZ座標データに基づいて仮想三次元空間の座標系に対応させて配置し、前記仮想三次元空間の高さ方向を表示画面の上下方向に合わせた画像として表示手段の表示画面Dに表示することで、見取図G1〜G4のそれぞれがずれることなく、立体的に表示することができる。
(もっと読む)
フェムトセル識別子および場所を用いる、フェムトセルがサーブする無線機器の測位
測位をサポートするための技術が説明される。ある態様では、フェムトセルがサーブする移動局の測位は、フェムトセルを無線ネットワーク中の別のセル/セクタと区別するために用いられる少なくとも1つの識別要素を、フェムトセルに送信させることによって、サポートされる。少なくとも1つの識別要素は、フェムトセルのためのある情報を搬送することもでき、その情報は移動局の測位と関連があり得る。ある設計では、フェムトセルは、フェムトセルに割り当てられた少なくとも1つの識別要素およびフェムトセルの場所を、測位の助けとして移動局に送信することができる。移動局は、少なくとも1つの識別要素およびフェムトセルの場所を、受信およびロケーションサーバに転送することができる。そして、移動局およびロケーションサーバは、少なくとも1つの識別要素およびフェムトセルの場所に基づき、測位を実行することができる。 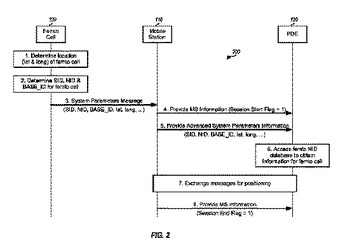 (もっと読む)
(もっと読む)
測位システム

【課題】RSSIを測定するための回路を必要とせず、また、演算を行うことも無く、簡便な方法でリーダライタとタグとの距離を検出することができるようにすることを目的とする。
【解決手段】測位システムのリーダライタ装置は、送信電力を段階的に変えて、当該送信電力を示す電力値を含む質問信号を繰り返し送信し、タグは、質問信号を受信し、当該質問信号に含まれている電力値を含ませた応答信号を送信し、応答信号を受信したリーダライタ装置は、応答信号に含まれる電力値と自装置の識別情報とを管理装置に送信し、管理装置は、受信した電力値と識別情報とに基づいて、前記タグの位置を検出する。
(もっと読む)
信号処理装置、情報処理装置、信号処理方法、データ表示方法、及びプログラム
【課題】GPSモジュールに流れる信号の観測又は解析を効率的に行うことを可能とすること。
【解決手段】全地球測位システムの衛星から受信された信号の周波数を所定の中間周波数に変換することにより得られる中間周波数信号の拡散符号の同期を捕捉する同期捕捉部と、前記同期捕捉部により同期を捕捉された前記中間周波数信号に含まれるメッセージを復調する復調部と、前記復調部により復調された前記メッセージに基づいて装置の位置若しくは速度又は時刻のうちの少なくとも1つを測定した結果を表す一次信号を所定の信号線に出力する測定部と、前記中間周波数信号又は当該中間周波数信号から生成される信号のうちの少なくとも1つを含む二次信号に所定のヘッダを付与して前記所定の信号線に出力する二次信号出力部と、を備える信号処理装置が提供される。
(もっと読む)
移動体用測位装置
【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
受信機の位置決定
開示される方法及びシステムを使用してユーザ装置の位置を決定する。ユーザ装置は、データ信号及び/又は搬送波信号を、周回している宇宙船から受信することができる。これらのデータ信号は、ユーザ装置の測位計算及び/又は追尾維持に使用することができる。開示される方法及びシステムは、ユーザ装置の時間バイアス及び周波数バイアスの問題を解決することができる。追尾維持を行なう場合、カルマンフィルタ状態推定器を拡張してユーザ装置の速度を推定することができる。  (もっと読む)
(もっと読む)
無線通信装置、無線通信システム、及び直接波の受信タイミング検出方法
【課題】送信電力を増大させることなく、より高精度に直接波の受信タイミングを検出することが可能な無線通信装置を提供すること。
【解決手段】所定時間毎に所定の規則で変更される中心周波数を持つ信号を受信する信号受信部と、前記信号受信部で受信された信号から、前記所定の規則に基づいて受信時に未使用となる周波数領域の信号成分を除去する未使用領域成分除去フィルタと、前記未使用領域成分除去フィルタを通過した信号成分に逆変調処理を施す逆変調部と、所定期間について前記逆変調部で逆変調処理が施された信号成分を累積加算して加算信号を生成する信号加算部と、前記信号加算部で生成された加算信号から得られるインパルス応答に基づいて直接波の到来時刻を決定する直接波到来時刻決定部とを備える無線通信装置が提供される。
(もっと読む)
移動通信方法及び無線基地局
【課題】移動局UEの測位精度の改善を図る。
【解決手段】本発明に係る無線基地局eNBは、移動局UEとの間の上りリンクにおいて同期が確立されていない状態で、測定トリガを検出した場合に、移動局UEに対して、RAプリアンブル割当信号を送信するように構成されている下りデータ再開処理部12と、RAプリアンブル割当信号で割り当てられたRAプリアンブルの受信に応じて、上りリンクにおける伝搬遅延を算出するように構成されている伝播遅延算出部14とを具備する。
(もっと読む)
端末位置検出システム及び船員位置管理システム
【課題】無線LANによって端末位置を検出する端末位置検出システムにおいて、様々な原因で生じる検出位置精度の低下を抑制する。
【解決手段】端末位置検出システム1が備える複数の中継機3は、検出対象者100が携帯する無線LAN端末装置2から送信される無線フレームを受信し、その受信状態に関する受信状態情報を作成する。位置演算装置4は、中継機3から取得した受信状態情報に基づいて、それぞれの無線LAN端末装置2の位置を演算により推定し、表示装置5に表示させる。ただし、推定された現在の無線LAN端末装置2の位置が、当該無線LAN端末装置2の過去の位置を含む所定範囲から外れていた場合は、推定された現在の無線LAN端末装置2の位置は誤りと判定され、表示装置5に表示されない。
(もっと読む)
RFIDシステムおよび無線装置
【課題】干渉なしでキャリア波を無線装置に送信させる。
【解決手段】測位システムにおいて、基準無線装置(302)は、第1の期間(40)に情報要求信号(42)を送信し、第2の期間(41)に無変調キャリア波要求信号(42)を送信する送信部(330)と、応答信号(56)を受信し、第3の期間(49)に無変調キャリア波を受信して無変調キャリア波の位相差(PD)を検出する受信部(350)と、受信識別情報を出力し、位相差(PD)を出力する制御部と、を具えている。
(もっと読む)
所有者識別システム
【課題】無線端末の所有者を識別することができる所有者識別システムを提供する。
【解決手段】所有者識別システム100は、複数の人間が居るショッピングモールなどに設置された6台のLRF16a,16bと、AP14を有する中央制御装置10とを含む。中央制御装置10は、或る人間が所有する携帯端末12と、AP14との電波強度rを測定すると共に、LRF16a,16bによって検出される複数の人間の位置(x,y)からAP14までの距離dを算出する。また、中央制御装置10は、事前学習によって作成した分析テーブルから、電波強度rに対応する平均距離Dと標準偏差σを特定する。そして、中央制御装置10は、人間毎に、携帯端末12を所有する確率を求め、最大値かつ所定値以上である人間を携帯端末12の所有者として推定する。
(もっと読む)
GPS端末、測位方法、通信システム及びプログラム
【課題】GPS(Global Positioning System)端末の測位時の消費電流を削減し、バッテリの持ち時間を長くする。
【解決手段】GPS端末は、前記ネットワーク側からアシストデータの受信後、当該アシストデータを用いずに作成した測位結果を応答し、セッションを開放する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】 測位機能を有する移動通信端末の、測位の繰り返しの際の電力消費を低減させる。
【解決手段】 測位サーバ10は、移動通信端末20との間で情報を送受信する送受信部12と、受信された情報に基づいて、移動通信端末20の近傍に位置する別の移動通信端末20を示す近傍端末情報を取得する近傍端末情報取得部13と、近傍端末情報によって示される別の移動通信端末20についての、受信された位置情報に基づいて、位置の推定対象となる移動通信端末20の位置を算出する位置算出部15とを備える。
(もっと読む)
基地局の選択方法および無線通信端末
【課題】端末位置の推定位置精度を改善すること。
【解決手段】無線通信端末2は、複数の基地局3から、複数の基地局3それぞれの位置情報を含む電波を受信する無線通信部11と、無線通信部11が複数の基地局3から受信した基地局3毎の受信電波の受信強度を取得する受信強度取得部12と、無線通信部11が電波を受信した複数の基地局3から、受信強度取得部12により取得された受信電波の強度が最も強い1つの基地局3を、基準基地局として選択する基準基地局選択部34Aと、無線通信部11が電波を受信した複数の基地局3から、基準基地局の近傍にある基地局3を、近傍基地局として選択する近傍基地局選択部34Bとを有し、受信電波の強度が最も強い基準基地局と、基準基地局の近傍にある近傍基地局とを、無線通信端末2の位置を推定するための複数の基地局3として選択する。
(もっと読む)
無線ネットワークにおいてノードのセットをロケーション特定するための方法
【課題】方法が、未知のロケーションを有するターゲットノードおよび既知のロケーションを有するアンカーノードのセットを含む無線ネットワーク内のノードのセットをロケーション特定する。
【解決手段】アンカーノードのセットはアンカーノードのサブセットに分割され、各サブセットは少なくとも3つのアンカーノードを有する。ターゲットノードから、各サブセット内のアンカーノードのそれぞれへの距離が測定され、ターゲットノードのとり得るロケーションが推定される。各推定されたロケーションに幾何学的制約を適用され、有効なロケーションが求められる。この有効なロケーションはフィルタリングされ、フィルタリングされたロケーションが求められる。フィルタリングされたロケーションが平均化され、ロケーションの初期推定値が求められる。
(もっと読む)
移動体検知システム
【課題】基地局端末と被測距端末との間、又は複数の基地局端末間に存在する移動体を検知することができる移動体検知システムを得る。
【解決手段】複数の基地局端末と、1又は複数の被測距端末4とを備え、基地局端末は、被測距端末4及び/又は他の基地局端末と無線信号を授受し、無線信号の伝播遅延時間及びRSSIを求め、該伝播遅延時間及びRSSIに基づき、当該基地局端末と、被測距端末4又は他の基地局端末との間の移動体5の有無を検知するものである。
(もっと読む)
測位システムおよび測位方法
【課題】マルチパス受信の基地局が存在する場合でも、移動端末の位置計算の誤差を小さくし、精度良く移動端末の位置を算出することを課題とする。
【解決手段】測位システムの計算機10は、各基地局が移動端末から電波を受信した受信時刻に関する情報である受信時刻情報を受信し、受信された受信時刻情報を用いて、移動端末の位置を算出する。そして、計算機10は、移動端末の位置と、各基地局の位置情報とを用いて、逆算受信時刻を逆算し、受信された受信時刻情報と逆算された逆算受信時刻との差分を用いて、各基地局を評価する。続いて、計算機10は、評価された各基地局の評価結果を用いて、各基地局のうち、移動端末の位置算出に利用される基地局を選択し、選択された基地局の受信時刻情報を用いて、移動端末の位置を算出する。
(もっと読む)
推測航法における高度成分の調整
ここに開示される主題は、センサーによる推測航法に少なくとも部分的に基づいて推定所在の高度成分を調整することに関する。 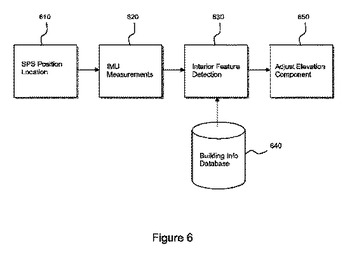 (もっと読む)
(もっと読む)
画像撮影システム、画像撮影装置およびその方法
【課題】撮影位置を適応的に可能な限り正確に検出して、撮影位置情報を画像情報に付加する。
【解決手段】本願開示の画像撮影装置は、撮影装置が使用可能な複数の位置検出用センサ(GPS176、方向センサ178,加速度センサ180および速度センサ182など)の内、画像撮影が行われている環境等に対応して、例えば、GPS信号が受信可能な位置においては、GPS176により位置情報を検出し、GPS信号が受信不可能な位置においては、その他のセンサにより位置情報を検出すると言ったように、使用されうる位置検出用センサの内、最適ないずれかが選択されるように構成されている。このように最適なセンサにより検出された位置情報は、カメラ150により撮影された画像に、指定された態様で付加され、表示あるいは記憶される。
(もっと読む)
電子機器およびその制御方法
【課題】簡単な構成で消費電力を低減でき、正確な時刻を表示することができる電子機器およびその制御方法を提供すること。
【解決手段】電子機器は、第1衛星信号および第2衛星信号を受信するGPS装置10と、制御部20と、週番号特定情報が記憶されるRAM31と、を備える。制御部20は、RAM31に週番号特定情報が記憶されている場合にGPS装置10を第1衛星信号を受信する第1受信モードで制御して時刻情報と第1週番号情報を取得し、RAM31に記憶されている週番号特定情報を用いて第1週番号情報の周期回数を算出した後、現在日時を算出する。また、RAM31に週番号特定情報が記憶されていない場合にGPS装置10を第2衛星信号を受信する第2受信モードで制御して時刻情報と第2週番号情報を取得し、この時刻情報および第2週番号情報に基づいて現在日時を算出する。
(もっと読む)
301 - 320 / 1,013
[ Back to top ]