
Fターム[5J062CC18]の内容
Fターム[5J062CC18]に分類される特許
401 - 420 / 451
位置管理方法及び位置管理システム

【課題】 移動先が第1の通信回線の圏外である場合であっても、対象物の位置情報等を管理装置に通知する。
【解決手段】 一実施形態によれば、物品1−1と共に移動するアタッチメント1−2は、物品1−1の移動開始後の移動終了を検出したならば、移動先位置、現在時刻を検出し、通信ゲートウェイ1−5と必要な他のアタッチメントを経由するアドホックマルチホッププロトコルを利用した通信回線を介して管理装置1−6に移動先位置、現在時刻及びアタッチメントの識別情報の登録を依頼する。これに失敗した場合には、アタッチメント1−2は、位置情報暫定保管装置1−4に移動先位置、現在時刻及びアタッチメントの識別情報の登録を依頼する。これに応じて、位置情報暫定保管装置1―4は、これらを一時保管し、第2の通信回線1−7を介して、これらを管理装置1−6に登録する。
(もっと読む)
位置推定システム

【構成】位置推定システムは中央コンピュータおよび複数の無線タグ読取機14を含む。検出時刻では受信電波強度情報に基づいて各読取機14の周囲の領域における無線タグ16の存在確率が算出される。また、タグ16の過去の履歴から予測される移動場所における当該タグ16の存在確率が算出される。さらに、人間関係を有しているタグ16らの重心座標に引力または斥力が作用するか否かに応じて予測された移動場所における当該タグ16の存在確率が算出される。さらに、タグ16の周囲の環境20に存在する影響物体24の座標に引力が作用するか否かに応じて予測された移動場所における当該タグ16の存在確率が算出される。そして、存在確率の最も高い場所の重心座標を算出し、当該検出時刻における当該タグ16の推定位置座標として記録する。
【効果】無線タグの位置をより正確に推定することができる。
(もっと読む)
位置情報を持つ複数IDのグループ化方法および動線の予測もしくは補間を行う動線管理システム
【課題】動線管理システムにおける位置情報を取得するにあたって、IDタグの数が多量になり、ネットワーク上のデータトラフィックが膨大になることによって、必要な位置情報の取得の失敗や遅延が発生してしまう問題をリアルタイム性を損なわずに解決する。
【解決手段】無線範囲内に存在する複数IDタグの中から同じ動線を辿る集団を認識する為のIDタグ間の移動速度と進行方向とIDタグ間の指定範囲を比較しグループ化判定し、グループ動線を作成する手段。外挿法により動線予測を行う手段。内挿法により動線補完を行う手段。また、動線予測補完に於ける禁止領域への干渉を外部情報を持って管理する手段。
(もっと読む)
測位システム、装置、及び方法
本発明は、送信機(2)、受信機(4)、及び複数の反射体(6)を含む測位システム、装置、及び方法に関する。信号が送信機から受信機に直接送信されると共に、反射体(6)を介しても送信される。ロケーションサーバ(8)が信号成分(40)を反射体(6)と共に識別することによって送信機又は受信機の未知の位置を計算する。  (もっと読む)
(もっと読む)
測位装置及び測位方法
【課題】
測位装置において高精度の測位に必要な時間を実効的に短縮し、ユーザの感じる待ち時間を短縮する。
【解決手段】
第1測位部7と、表示部6と、第2測位部8とを具備する測位装置を用いる。第1測位部7は、自身の位置を低精度で検出する第1測位を実行し、第1位置情報を取得する。表示部6は、第1位置情報の表示を行う。第2測位部8は、第1測位の実行及び第1位置情報の表示に並行して、自身の位置20を第1測位よりも高精度で検出する第2測位を実行し、第2位置情報を取得する。表示部6は、第2位置情報に基づいて表示を更新する。
(もっと読む)
位置測定方法およびそれを用いた位置測定装置及び位置測定システム
【課題】測定場所における多様な伝播特性を考慮して測定誤差を低減し得る位置測定方法、それを用いた位置測定装置および位置測定システムを提供する。
【解決手段】測定範囲内の複数の測定点において、互いに異なる各方位の個別方位定数を取得し、互いに異なる方位毎に取得した方位定数と、該複数の測定点からの受信電力の測定結果に基づいて、個別定数を用いた距離対受信電力の関係式により、複数の測定点から無線通信地点までの概算距離を求め、該概算距離に基づいて無線通信地点の概略位置領域を特定する第1ステップと、複数の測定点において、概略位置領域を指す方位に該当する個別方位定数を選択し、複数の測定点からの精密距離を求め、該精密距離に基づいて無線通信地点を詳細に特定する第2ステップで無線通信地点の位置を特定する。
(もっと読む)
位置検出システム
【課題】 屋外及び屋内において位置の検出が可能な位置検出システムを提供する。
【解決手段】 S10では、端末装置2は、送信装置1から送信される電波から送信装置識別IDを認識すると共に、電波の電力強度からオフセットピーク時間を検出する。S20では、オフセットピーク時間と送信装置識別IDを関連付けた情報を作成して記録部24に記録し、S30では、この情報をサーバ3に送信する。S40では、サーバ3は、3つ以上のオフセットピーク時間と、予め保持している送信装置1の位置関係を示す情報、もしくは、オフセットピーク時間と、予め保持している送信装置1の位置関係を示す情報と予め複数の送信装置1からのオフセットピーク時間を測定した結果を用い、端末装置2の位置情報を決定する。S50では、サーバ3はこの情報を端末装置2に送信する。S60では、端末装置2はこの位置情報を受け取り、位置情報を位置情報利用部25に提供する。
(もっと読む)
マルチパス信号を用いて位置決めを行うためのシステム及び方法
RFの能動的か、受動的か、又は支援された位置確認アプローチのための信号処理技法である。該信号処理技法は、フィルタか又は推定器、例えば、非線形フィルタと共に、追加的な測定値としてマルチパス信号を利用する。前記フィルタは、インダイレクト及びダイレクトパス測定値か又は任意の他の利用可能な信号を使用して、観測可能なインダイレクトパスのパラメトリックモデルを構築する。1つか又は複数のダイレクトパス測定値が、(例えば、障害のせいで)その後、失われる場合には、インダイレクトパス測定値を用いて、人間か又は対象となる物体の位置の推定をフィルタが維持する。  (もっと読む)
(もっと読む)
位置推定装置、位置推定方法及び位置推定プログラム
【課題】 複数の受信機を配置したフィールド内において、発信機を持たせた移動体の位置を簡易に推定する。
【解決手段】 複数の受信機が配置されたフィールド内において発信機を持たせた移動体の位置を推定するために:予め取得した各前記受信機による前記発信機の検出状況を時系列に記録した検出記録データから、単位時間における前記複数の受信機の各々による前記発信機の検出状況を表す特徴ベクトルの群を生成し;前記特徴ベクトルの群を所定のグループ化基準に基づいてグループ化し、各グループの各々に対して前記グループを代表する代表特徴ベクトルを生成し;前記代表特徴ベクトルごとに、前記フィールド内の場所をラベル付けする。
(もっと読む)
近距離場位置測定システムおよび方法
ヌル軸が垂直であり、かつ、水平面などの対象となる平面内にヌル軸が位置するように配置された、2つの磁気アンテナを利用することによって位置を特定するために、近距離場信号特性が使用される。2つのアンテナは、送信アンテナまたは受信アンテナとして使用されてもよい。アンテナを直交方式で駆動することによって、対象となる平面内で全方向性パターンの均等物を生成するように、アンテナは駆動されてもよい。直交駆動は、時間直交または位相直交であってもよい。位置は、伝搬特性を含んでもよい近距離場応答に基づいて特定され、伝搬特性は、振幅、位相、相対的な振幅、または位相、あるいはその他の特性を含んでもよい。一実施形態では、1つの受信機の位置を特定するために、複数の送信機が利用される。別の実施形態では、1つの送信機の位置を特定するために、複数の受信機が利用される。空間効率的な磁気アンテナが開示される。 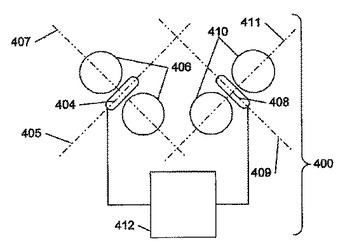 (もっと読む)
(もっと読む)
位置検出システム及び位置検出方法
【課題】受信器と集計ポイントの間が無線であるシステムの受信器に発信器及びMPUを付加した構成で、複数の発信器のうち任意の一つを集計ポイントとできるシステムを提供し、高精度位置検索を可能とするのが目的である。
【解決手段】 位置検出すべき対象物からの第一の信号をあらかじめ位置確認がなされた複数の位置で無線通信によって受信し、該第一の信号の信号強度レベルと複数の既知位置の受信器の属性情報を付加した第二の信号を、第二の信号を集計する集計装置で無線通信によって受信し、集計した第二の信号に含まれる第一の信号の信号強度レベルから対象物の位置を特定するシステムに関し、第二の信号を集計する集計装置の位置を任意に変えられることを特徴とする位置検出システム。
(もっと読む)
位置決定方法及び装置
本発明は、無線航法信号受信機の位置決定方法に関し、本方法は、複数の地上位置及び時間値について、無線航法信号源によって送出される信号の受信特性を、前記信号源の位置、電磁波伝搬モデル、及び各位置の環境の地形情報の関数として予測するステップ、受信機が無線航法信号を受信するステップ、受信機によって受信された信号の受信特性を測定するステップ、及び実際に測定された特性と予測特性とを処理して受信機の位置決定情報を供給するステップを含む。  (もっと読む)
(もっと読む)
測位装置およびそれを用いる位置情報システム
【課題】 携帯電話の端末装置や携帯情報端末に組込まれるなどして、使用者によって所持され、GPS測位を行うとともに自律測位も併用するようにしたセキュリティ端末において、常に良好な測位結果を得られるようにする。
【解決手段】 GPS受信手段11およびGPS測位手段12によるGPS測位結果と、自律測位測位手段13による自律測位結果とを、制御手段15が選択的に採用して、無線通信手段14から通信ネットワーク2を介してセンター装置3へ送信するセキュリティ端末1において、前記制御手段15は、GPS測位を行う度に、GPS測位結果と自律測位結果とから、それぞれに予め設定されるエラー値判断基準に基づき、より正確と推定される方の測位結果を、前記自律測位手段13の初期位置に設定する。したがって、逐次更新され、しかもGPS測位結果をそのまま採用する訳ではなく、初期位置精度を向上できる。
(もっと読む)
ノード位置測位システム、無線基地局及び位置測定方法
【課題】基地局の構造を簡単にすることを目的とする。
【解決手段】本発明は、ノードと、基準局と、複数の基地局と、前記ノードの位置を算出するサーバと、前記基地局と前記サーバとを接続するネットワークと、を有するノード位置測定システムにおいて、前記基準局は、前記測位信号を受信する測位信号受信部と、前記測位信号受信部が前記測位信号を受信した後に基準信号を送信する基準信号作成部と、を備え前記基地局は、前記測位信号及び前記基準信号を受信する信号受信部と、前記信号受信部が受信した前記測位信号及び前記基準信号から特定のパターンを検出し、検出した時刻を測定する受信時刻測定部と、前記受信時刻測定部が測定した時刻から生成された時刻情報を前記サーバに送信する通信部と、を備え、前記サーバは、前記基地局から送信された時刻情報に基づいて前記ノードの位置を算出する位置計算部を備える。
(もっと読む)
座標算出システムおよび装置、座標算出方法、プログラムならびに記録媒体
【課題】 受信装置の未知の座標をより安価に、また容易に、特定することができる座標算出システムを提供する。
【解決手段】 受信装置2が、無線信号発信装置1の座標を含む無線信号を受信し、受信装置2が、無線信号の受信強度を検出する。また受信装置2が、検出した受信強度に基づいてその無線信号を発信した無線信号発信装置1から自装置までの距離を特定する。そしてサーバ3が、異なる複数の座標に位置する無線信号発信装置1それぞれから無線信号を受信した後に、当該無線信号発信装置1それぞれの各座標と当該無線信号発信装置1それぞれから受信装置2までの各距離とを用いて、受信装置2の座標を算出する。
(もっと読む)
波源探索装置および波源探索方法
【課題】探索作業者に探索対象の位置を示す明確な指標を与えることが可能な波源探索装置およびこの波源探索装置を用い、監視対象の地域を自由に変更することが可能な波源探索方法を提供する。
【解決手段】波動信号を受信するアンテナと、アンテナに到来した波動信号の波源の方向を示す情報を含む位置推定情報を出力する観測手段と、観測手段によって得られた位置推定情報に基づいて、波源の位置を示す目視可能な指標を提供する指標提供手段とを備えて波源探索装置を構成する。このような波源探索装置を移動体に搭載し、観測指示に応じて、波源探索装置に備えられた観測手段による観測動作を実行させる観測実行ステップと、得られた観測結果に対応して、波源探索装置に備えられた指標提供手段によって波動信号の波源の位置に関する指標を移動体の操縦者に提供することにより、移動体を進めるべき針路を決定する作業を支援する針路決定支援ステップとを備えて波源探索方法を構成する。
(もっと読む)
物品位置通知システム
【目的】本発明は、物品にICタグを貼付し位置を検出して通知する物品位置通知システムに関し、物品にICタグ、更に、当該物品を載置等する場所にICタグを貼付して複数のICタグリーダで位置を検出し、これら物品および場所の位置をもとに物品/場所の移動情報(移動前/移動後の位置、紛失)をレイアウト上に強調表示して通知することを目的とする。
【構成】 多数の物品にそれぞれ貼付したICタグから無線で情報を読み取る複数のICタグリーダと、複数のICタグリーダで送信する電波強度を可変してICタグから情報が読み取れたときあるいは読み取れ無くなったときの電波強度をもとに、テーブルを参照してICタグまでの距離を測定する手段と、複数のICタグリーダで測定したICタグまでの距離をもとにICタグの位置を特定する手段と、特定したICタグの位置と、以前のICタグの位置とを比較する手段と、比較した結果を通知する手段とを備える。
(もっと読む)
測位装置、測位方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】測位結果を短時間で取得することができる測位装置、測位方法、測位装置の制御方法、測位装置の制御プログラム及び測位装置の制御プログラムを記録した記録媒体を提供すること。
【解決手段】位置情報衛星から位置関連信号を受信して現在位置を測位する測位手段と、通信可能な基地局の数及び識別情報を含む通信可能基地局情報を生成する通信可能基地局情報生成手段と、通信可能な基地局の数が2以上である場合に、通信網を介して情報提供装置から通信可能範囲情報を取得する通信可能範囲情報取得手段と、通信可能範囲情報に基づいて重複範囲情報を生成する重複範囲情報生成手段と、重複範囲情報に含まれる点の中から初期位置情報を生成する初期位置情報生成手段と、を有することを特徴とする測位装置40。
(もっと読む)
無線タグの位置推定システム
【構成】無線タグの位置推定システムは、所定空間に配置された複数の無線タグ読取機14を含む。この所定空間に配置された読取機14による検出に基づいて、その検出時刻における所定空間内の無線タグの位置が推定される。その位置の推定された無線タグを目標として移動型ロボット16の移動が制御させる。移動型ロボット16には無線タグ読取機18が設けられている。この読取機18によって目標とされた無線タグが検出されたとき、読取機18による検出に基づいて、当該検出時刻における当該無線タグの推定位置座標が算出されて記録される。
【効果】無線タグの位置をより正確に推定することができる。
(もっと読む)
位置測位装置および位置測位方法
【課題】測定精度を改善することができる位置測位装置および位置測位方法を提供する。
【解決手段】位置測位装置に、複数の送信機からの受信データを記憶する記憶手段と、複数の送信機のうち、測位対象物に対応する送信機からの受信データの時系列データと測位対象物以外の送信機からの受信データの時系列データに基づき、信号の時系列的な変動の類似性を示す類似度を計算する類似度計算手段と、類似度に基づいて、測位対象物の位置を測定する位置測定手段とを備えることにより達成される。
(もっと読む)
401 - 420 / 451
[ Back to top ]