
Fターム[5J062DD03]の内容
Fターム[5J062DD03]に分類される特許
41 - 60 / 78
3つのGPS周波数を用いて整数値サイクル(whole−cycle)搬送波位相アンビギュイティを解消する方法
配置非依存であり、屈折が補正され、アンビギュイティが解消された、搬送波位相測定値を取得するための新たな3種周波数技法が記載されている。まず、少なくとも2つのワイドレーン搬送波位相測定値差異に対するアンビギュイティを、対応する周波数加重コード測定値を平均化することによって取得する(210)。そして、これらの2つのアンビギュイティが解消された測定値を結合して、屈折が補正された合成測定値を形成する(220)。結果としての合成測定値は、元の搬送波位相測定値におけるマルチパス・ノイズの増幅に起因して極めてノイズが多い。しかしながら、このノイズの多い屈折が補正された搬送波位相測定値を、別の、ノイズが最小であり、屈折が補正された搬送波位相合成測定値を用いて平滑化することができる。ノイズが最小であり、屈折が補正された合成測定値を、それらの整数値サイクルアンビギュイティを解消する前に初期搬送波位相測定値から構成する(230)。2つの屈折が補正された測定値の差異を平滑化する(240)ことによって、ノイズを低減することができ、低ノイズ測定値におけるバイアス(不正確なアンビギュイティに起因する)を推定して後に補正することができる。 (もっと読む)
衛星信号判定装置

【課題】衛星航法システムにおいて、それぞれ同一の情報を含む2周波の信号が同一衛星から同時に出力される場合に、当該2周波の信号がどの衛星から発せられたかの判定を、正確、簡易に、かつ効率よく行うようにする。
【解決手段】 各チャンネルにおいて、次のような処理を行う。受信装置6では、L1信号のPNコードと所望する衛星のPNコードとの相関値を計算し、当該相関値のピークが第1閾値を越えたか否かによりL1信号が所望する衛星のものであるか否かを判定する。所望する衛星のものと判定したときは、L1信号判定部11では、所望する衛星の所望する以外の衛星のキャリア周波数の比較及び信号レベルの比較により、L1信号が所望する衛星のものか否か判定する。この判定を前提として、L2信号判定部12では、受信信号の送信時刻によりL2信号が所望する衛星のものか否か判定する。
(もっと読む)
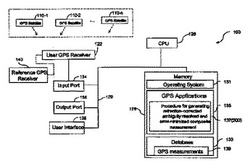
統合型移動端末ナビゲーション
セルラ通信ネットワークの1以上の同期していない地上送信源102〜105からの信号を受信するための送信源受信機204と、衛星測位システムの衛星107〜110からの信号を受信するための衛星測位受信機200とを備えた移動端末100を含むナビゲーションシステムが提供される。端末100はクロック208も含む。プロセッサ209は、各値が受信機200、204によって生成された測定値を表している斯かる値のリストと、端末クロックのバイアスとを有する測定値ベクトルを取得する働きをする。プロセッサ209は、動的ナビゲーションソリューションを得るために、システムの現状態を表す状態ベクトルを、以前に決定された状態ベクトルと、測定値ベクトルと、動的モデルとを使って計算する。状態ベクトルは、その成分として少なくとも、(a)端末100の1次元以上の位置情報と、(b)同期していない地上送信源102〜105に付随するクロックの所与の時間に関するバイアスの表現と、(c)端末クロック208のバイアスと、(d)(a)乃至(c)の成分に関連する誤差を示すクォリティ指標と、(e)(a)乃至(c)の成分の他の成分に対する依存度を示す相関指標とを含む。 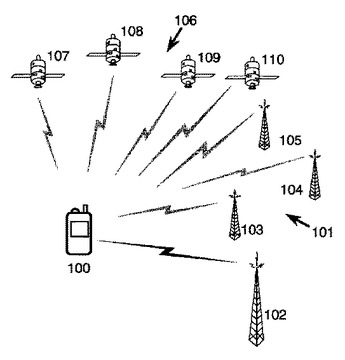 (もっと読む)
(もっと読む)
衛星航法装置
【課題】人工衛星から送信される複数の周波数の航法信号を受信し、複数の周波数で測定した各疑似距離に基づいて疑似距離真値を得る衛星航法装置において、疑似距離真値に混入する雑音成分を低減する。
【解決手段】GPSの航法衛星からのLl周波数、L2周波数の両周波数に関して測定したL1、L2の各擬似距離に基づいて、L1周波数の電離層遅延そのものを計算し、その計算した電離層遅延のみを平滑化した上で擬似距離真値の計算に用いる。
(もっと読む)
変調信号、システムおよび方法
【課題】ナビゲーションシステムなどに適した信号を変調するための副搬送波変調信号および当該副搬送波変調信号を生成する方法を提供する。
【解決手段】副搬送波変調信号を生成する方法は、第1の副搬送波(BOC(5,1))の一部と第2の副搬送波(BOC(1,1))の一部を多重あるいは選択的に結合するステップを含む。
(もっと読む)
ブースタ
【課題】 放送信号及びGPS信号を適切なレベルに1台で増幅できる。
【解決手段】 GPS受信用アンテナにより受信されたGPS信号と、放送受信アンテナにより受信された放送信号との合成信号から分波した放送信号を、増幅器128a乃至128cが増幅し、出力端子130に供給する。前記合成信号から分波されたGPS信号を増幅器136a乃至136cが増幅してGPS信号再送信アンテナに供給する。増幅器136a乃至136cには、GPS再送信アンテナからの送信出力が所定レベルとなるように、レベル調整器134と検波回路140とによる自動利得制御回路が設けられている。
(もっと読む)
電離層モデル補正方法
【課題】現実に則した電離層電子密度分布を決定することの可能な電離層モデル補正方法を提供する。
【解決手段】衛星信号(GPS、Galileo、QZS等)の複数周波を観測することにより衛星信号が通過する途中の総電子数TECをリアルタイムに求め、その値とIRIやBentモデルなどの電離層モデルに基づくTEC値とをと比較することにより、電離層モデルを補正するためのパラメータを算出する。
(もっと読む)
GPS装置を位置決めするシステムおよび方法
GPS装置の正しい位置を、予め定められた選択すべき位置(8)のセットから決定するシステムと方法を提供する。このシステムは、目視可能なGPS衛星(1)および予め定められた代替え位置(8)の既知位置(2)に基づいて、各衛星と各位置との間の理論的距離(10)および/またはその距離の差を決定する。これらの距離は、予め定められた代替え位置のなかから正しい位置を選択するための、GPS装置のアンテナと各GPS衛星の間の距離の測定値に関連がある。貨物置場における予め定められたコンテナスロットを識別するシステムおよび方法も開示される。  (もっと読む)
(もっと読む)
衛星航法受信機
【課題】異なる信号を用いて測位演算を行う場合であっても、異なる信号毎に発生する擬似距離のバイアスの影響を受けずに正確な測位演算を行うことができる衛星航法受信機を提供することを目的とする。
【解決手段】衛星から、少なくとも2種以上の異なる信号を帯域制限フィルタを用いてフィルタリングし、フィルタリング後の信号から得られる擬似距離を使って測位演算を行う際に、前記異なる信号間の擬似距離バイアスの差分値である信号間バイアスを新たな未知数として、測位演算を行うことを特徴とする。また、本発明は、同じ種類の信号グループ毎にクロックオフセットをそれぞれ求め、その差から前記信号間バイアスを測定し、該測定した信号間バイアスで補正を行った擬似距離を用いて測位演算を行うようにしても良い。
(もっと読む)
衛星航法装置
【課題】衛星航法装置において、キャリアスムージングに用いられる測定コード位相および測定搬送波位相変化量から電離層遅延を除去し、測定コード位相と搬送波位相変化量の間のオフセットを平滑化する時定数を長くして擬似距離の精度を上げること。
【解決手段】L1周波数とL2周波数の2つの周波数にてコード位相と搬送波位相変化量をそれぞれ測定する。コード位相と搬送波位相変化量のそれぞれを電離層フリー線形結合して、電離層遅延を除去したコード位相の真値と搬送波位相の変化量の真値を求め、コード位相の真値と搬送波位相の変化量の真値を用いてキャリアスムージングを行う。
(もっと読む)
位置推定システム及び位置推定方法
【課題】端末位置の推定精度が向上された位置推定システム及び位置推定方法を提供すること。
【解決手段】無線通信機能を有しており、無線送信の設定に用いる送信用パラメータのパラメータ値が複数設定可能な位置推定用端末11と、位置推定用端末11と無線通信する基地局21と、位置推定用端末11の端末位置を推定する32と、32による位置推定用端末11の端末位置の推定に用いる基準情報を格納するDBサーバ31とを備え、位置推定用端末11から基地局21を介して送信された位置推定用端末情報を受信すると、この受信した位置推定用端末情報と、DBサーバ31に格納された基準情報とに基づいて位置推定用端末11の端末位置を推定する。
(もっと読む)
衛星航法受信装置
【課題】周波数の異なる複数の送信信号を受信する場合に、各受信信号をA/D変換と同時に周波数変換して得たIF信号からベースバンド信号を復調するに際して、可変局所信号発生器に数値制御発振器を使用し、1個のサンプリングクロックを用いながらも、それら複数の受信信号に対して正常な直交復調が実現できるようにする。
【解決手段】A/D変換部で生成するIF信号の周波数を、入力するRF信号とサンプリングクロックの周波数とから決まる複数の周波数の内の最低の周波数に選択し、そのIF信号を前段ミキサ部でサンプリングクロックの1/4の周波数の局所信号で乗算してから、数値制御発振器を使用した可変局所信号発生部で発生する局所信号により、後段ミキサ部においてベースバンド信号を復調する。
(もっと読む)
測位計算装置
【課題】移動局GPS受信機が地上に固定されていない条件で、安定かつ高精度な測位座標を得ることを課題とする。
【解決手段】複数のGPS衛星とGPS受信機との間で測定されたコード擬似距離測定値と搬送波位相測定値とを用いて測位座標を計算する測位計算装置であって、基準局搬送波位相測定値および移動局搬送波位相測定値の入力を受け付け、基準局搬送波位相測定値と移動局搬送波位相測定値との測定値差分量を計算し、測定値差分量を用いて、測定値残差の時系列に対して濾過平滑化を行って濾過平滑化測定値残差を計算し、搬送波位相バイアス量の時系列に対して濾過平滑化を行って濾過平滑化搬送波位相バイアス量を計算し、濾過平滑化測定値残差と、濾過平滑化搬送波位相バイアス量とを用いて、複数のエポックに対して測位座標の濾過平滑化された推定値を計算し出力する。
(もっと読む)
GPS受信装置
【課題】相関処理に要する時間を短縮することができるGPS受信装置を提供する。
【解決手段】GPS受信装置に、周波数の異なるL1波帯の測位信号およびL2波帯の測位信号に対して付加する同期信号を生成する手段と、前記同期信号が付加されたL1波帯の測位信号と前記同期信号とに基づいて、タイミングを決定し、該タイミングで、前記同期信号が付加されたL1波帯の測位信号とPコードレプリカ信号との相関処理を行う手段と、前記タイミングに基づいて、前記同期信号が付加されたL2波帯の測位信号と、Pコードレプリカ信号との相関処理を行う手段と、前記同期信号が付加されたL1波帯の測位信号およびL2波帯の測位信号と、Pコードレプリカとの相関処理に基づいて求められた位相に基づいて、L1およびL2波帯の測位信号の復調処理を行う手段とを備えることにより達成される。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 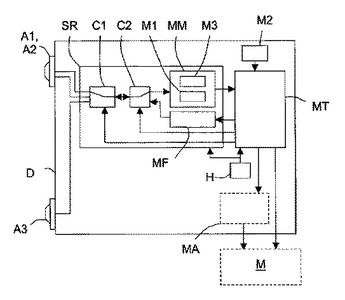 (もっと読む)
(もっと読む)
キャリア位相相対測位装置
【課題】長基線の場合であっても高精度に整数バイアスを決定することができるキャリア位相相対測位装置を提供することを目的とする。
【解決手段】測位演算部31において、位相差観測量から基線ベクトルと電離層遅延量の時間更新を生成し、該生成した時間更新、位相差演算部31から得られる位相差観測量、及びGPS受信機201から得られる衛星情報を用いて、基準周波数に対する整数バイアス、ワイドレーン信号に対する整数バイアス、基線ベクトル、及び電離層遅延を推定する。これにより、電離層遅延誤差の影響を除去して整数バイアス及び基線ベクトルを求めることができる。また、他の方法として、ワイドレーン信号に対する整数バイアスを決定後、これを既知情報として、基準周波数に対する整数バイアス、基線ベクトル、及び電離層遅延を推定することも可能である。
(もっと読む)
L1/L5バイアス推定を有する広域補強システムのための方法及び装置
広域補強システム(WAAS)は、L1/L5バイアス推定を含む。L1電離層遅延及びL1電離層遅延レートの推定値を受信し、GEO勾配電離層遅延を受信し、GEO衛星のユーザ電離層垂直誤差情報を受信し、L1電離層遅延及びL1電離層遅延レートの推定値並びにGEO勾配電離層遅延からL1/L5バイアス推定値を計算する。 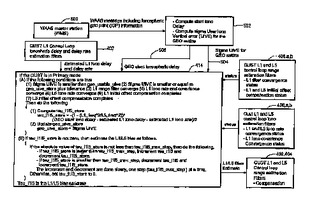 (もっと読む)
(もっと読む)
測位システム
【課題】測位精度の向上を図った測位システムを提供すること。
【解決手段】ユーザ装置3から伝送される測位衛星の観測データを用いて、基準局装置2の衛星信号受信機211〜21nごとにキネマティック測位を行ってユーザアンテナ位置を決定する。さらに、基準局装置2からユーザ装置3へ、基準局装置2で観測した測位衛星データを伝送し、ユーザ装置3でも独自にキネマティック測位を行う。それぞれ独立してアンビギュィティを解き、それぞれユーザ装置3のキネマティック測位位置を計算する。ユーザ装置3の測位結果は、基準局装置2へ伝送する。基準局装置2で求めた複数のユーザアンテナ位置結果と、ユーザ装置3から伝送されてきたアンテナ位置結果とを比較し、ユーザ測位結果の妥当性を確かめるようにする。
(もっと読む)
到来波方向推定装置、到来波方向推定方法および位置推定システム
【課題】 屋内や地下街等のマルチパスの生じる環境においても推定精度を向上させる。
【解決手段】 送信機から到来する電波の方向を受信機側で推定する装置であって、上記送信機から複数周波数の電波を受信し、各周波数における受信信号の振幅および位相を測定し、その測定結果に基づきマルチパス成分の影響の少ない1または2以上の周波数を選択する選択手段と、選択した周波数における上記受信機の移動に伴う受信信号の位相変化を監視し、位相変化量が最大となる移動方向を到来波方向であると判定する判定手段とを備える。
(もっと読む)
受信装置および電子装置における干渉の影響を低減する方法
本発明は、測位用受信装置(3)における干渉を減衰する方法であって、測位システムの衛星が送信した信号を受信し、この受信信号を増幅する方法に関する。上記測位用受信装置(3)において、上記受信信号の雑音レベルが決定され、この決定された雑音レベルの変動に基づいて干渉の存在が確定され、干渉中とは別の期間に受信した信号の雑音レベルに基づいて増幅の制御が行われる。本発明はまた、上記方法を適用する電子装置(1)、並びに、上記測位用受信装置(3)と関連して上記方法を実行できるプログラムにも関する。  (もっと読む)
(もっと読む)
41 - 60 / 78
[ Back to top ]