
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
241 - 260 / 352
標高検出装置および自車位置判定装置
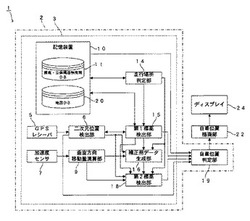
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
(もっと読む)
目的位置案内方法及びシステム

【課題】位置センサにより計測した現在位置とゴールとなる目的位置の位置関係を携帯端末に表示し、容易な目的位置の入力方法で目的位置への案内を行う目的位置案内方法および目的位置案内システムを提供する。
【解決手段】地図をイメージスキャナで携帯端末に読み込み、デジタル地図として取り込む。地図に記載され、現場においても確認できる基準点2点の緯度経度座標値を、衛星測位システムの位置センサで計測する。基準点2点の緯度経度座標値は、直交座標系の座標値に変換し、デジタル地図の各ドットに対応する直交座標値を算出する。携帯端末では、衛星測位システムの位置センサの情報と、無線機からの補正信号を受け取り、位置センサが出力する現在位置とデジタル地図の現在位置のポインタが一致するようにデジタル地図を表示する。携帯端末には、作業者の歩行に伴い移動する現在位置の印とデジタル地図上の目的位置が同時に表示される。
(もっと読む)
携帯型ナビゲーション装置及びナビゲーションプログラム
【課題】GPS信号から正しく方位情報を受信できない場合においても、自動的に精度の良い方位情報を取得しナビゲーションを行うことが可能な携帯型ナビゲーション装置を提供する。
【解決手段】仮想COMソフトウエア27は、GPSチップ21から入力したNMEAメッセージを解析し、NMEAメッセージ内の方位情報が正確であるか否かを判定する。正確であると判定した場合には、仮想COMソフトウエア27はNMEAメッセージをそのまま地図ナビゲーションアプリケーション28に出力する。一方、正確でないと判定した場合には、仮想COMソフトウエア27はNMEAメッセージ内の方位情報を地磁気センサ23で検出した方位情報に置き換えた上で、地図ナビゲーションアプリケーション28に出力する。
(もっと読む)
移動体位置推定システム、及び、移動体位置推定方法
【課題】 探索者の位置や探索履歴をも考慮して被探索者の位置を推定可能な移動体位置推定システム、及び、移動体位置推定方法を提供することを目的とする。
【解決手段】 第1の移動体の位置情報を用いて地図データの座標系の各位置に第1の移動体が存在する確率を算出し、その確率に応じて当該地図データの座標系に分散する第1の移動体用のパーティクルをサンプリングする第1のサンプリング手段と、第2の移動体の位置情報により特定される位置における第1の移動体が存在する確率が、他の位置における第1の移動体が存在する確率と比較して低くなるように、地図データの座標系の各位置に第1の移動体が存在する確率を算出し、第1のサンプリング手段によりサンプリングされた第1の移動体用のパーティクルを、その確率に応じてリサンプリングする第2のサンプリング手段とを有し、リサンプリングしたパーティクルから第1の移動体の位置を推定する。
(もっと読む)
マップマッチングに適するリンク設定システム、その方法およびプログラム
【課題】マップマッチングミスを無くすこと。
【解決手段】道路幅と平行する道路の道路幅や道路ネットワークの位置関係に応じてリンクのずらす方向とずらす距離を計算してリンクを設定する。
(もっと読む)
自車位置決定装置
【課題】自律航法では誤差が大きく、GPSデータが信頼できるときには、素早くGPSデータを利用して正確な自車位置を得ることができる「自車位置決定装置」とする。
【解決手段】GPS受信信号により自車両の位置と進行角を検出するGPS位置進行角検出部と、ジャイロと車速データにより自車両の位置と進行方位を検出する自律航法位置方位検出部と、GPS位置進行角検出部と自律航法位置方位検出部により自車両の位置と進行方位を決定する自車位置方位決定部と、自車位置方位決定部で決定した自車両の位置を地図の道路に一致させるマップマッチング部と、GPS位置進行角検出部で検出したデータの信頼性を判定するGPS信頼度判定部とを備え、自車位置方位決定部では、マップマッチング処理が行われないとき、GPS信頼度判定部でGPSデータに信頼性があると判定したときには、GPS位置と進行角により自車両の位置と進行方位を決定する。
(もっと読む)
測位装置
【課題】自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供すること。
【解決手段】地図データを記憶した地図データ記憶手段5と、移動体の挙動情報を検出する自律センサ2、3)と、GPS等の電波航法測位手段による測位結果に自律センサによる検出情報を累積して移動体の推定位置を検出する慣性測位手段82と、道路周辺の地物を検出する地物検出手段84と、地物の位置を同定する地物位置同定手段83と、地物の位置を基準に移動体の地物推定位置を推定する地物基準測位手段85と、推定位置及び地物推定位置をカルマンフィルタに適用して移動体の位置を推定する位置推定手段86と、を有することを特徴とする測位装置9を提供する。
(もっと読む)
不動物位置記録装置
【課題】道路周辺の不動物に関する高精度な測位データを簡単に収集することが可能な装置を低コストで実現すること。
【解決手段】不動物位置記録装置100は、自車両の絶対位置を取得する自車両位置取得装置110(GPS受信装置)と、走行中の道路周辺における物体の位置情報を取得する環境特徴取得装置120(測位装置)と、検出された環境特徴から自車両の運動(速度ベクトルやヨー角速度など)を推定する自車両運動推定部140と、推定された自車両運動および自車両の絶対位置に基づいて、道路周辺の不動物の絶対位置を推定して出力する不動物位置推定部130を有している。更に、不動物位置推定部130は、自車両取得位置評価部131と不動物位置評価部132から構成されている。また、自車両運動推定部140は、環境特徴評価部141と自車両運動評価部142から構成されている。
(もっと読む)
移動装置及び移動装置の自己位置推定方法
【課題】自律移動ロボット等の移動装置において自己位置推定を行う際の推定精度を向上させる。
【解決手段】ロボット1は、カメラ部101によって作業環境内に存在する物体を撮像した画像データを入力し、レーザレンジファインダ107によって作業環境内に存在する物体との距離を計測して得たレンジデータを入力する。また、i)再投影誤差算出部103が、画像データから検出したランドマークの画像上での位置と、記憶部106に格納された地図情報に含まれる作業空間におけるランドマークの位置を前記画像データに再投影した位置との再投影誤差を算出し、ii)位置誤差算出部108が、レンジデータと地図情報に含まれる形状データとの位置合わせ誤差を算出する。さらに、最適化部109が、これら再投影誤差及び位置合わせ誤差を含む目的関数をロボット1の周囲環境に応じて決定し、決定した目的関数を最適化してロボット1の自己位置を算出する。
(もっと読む)
ナビゲーション装置
【課題】地図データベースのデータ量を大幅に増大させることなく、マルチパスの影響による測位精度の低下を軽減するナビゲーション装置を提供する。
【解決手段】記憶部4に格納される地図データベースの各道路要素のデータに仰角マスク値を記録し、市街地などマルチパスの影響が大きいと予想される地域の道路では他の地域の道路より仰角マスク値を大きくする。測位部31は、この仰角マスク値より大きな仰角のGPS衛星からの信号を用いて測位を行う。
(もっと読む)
ナビゲーション装置
【課題】車両に搭載されるナビゲーション装置において、その装置の構成を大きくすることなく、確実に正しい日時が算出できるようにする。
【解決手段】車両用ナビゲーション装置では、GPS信号受信部が受信するGPS信号から、1980年1月6日午前0時を基準として約19.7年ごとにロールオーバーするGPS時刻データを取得すると共に(S160:YES)、ナビゲーション装置が有する地図DBから、地図情報が生成された生成日時情報を取得して(S200)、そのGPS時刻データと生成日時情報を取得とから、現在の正確な日時を算出する(S170)。
(もっと読む)
移動体搭載測位装置及びその測位方法
【課題】移動体搭載の測位装置において、位置データを受信することが出来る衛星の数が不足している場合でも、GNSS衛星からのデータのみで測位演算をすることによって、移動体搭載の測位装置の小型化、単純化を図る。
【解決手段】位置データを受信できる衛星が不足した場合には、過去の測位データから現在の車両1の速度ベクトルを推定して、車両1はこの速度ベクトルを延長した直線30上を走行しているものとして、GNSSデータから求めたGNSS衛星20と車両1との距離ρ1を用いて、車両1の測位位置を特定する。
(もっと読む)
運行監視システム
【課題】所定の経路を通行する移動体の位置をGPS測位によりそのまま表示すると、所定の経路を外れた運行軌跡が発生する。
【解決手段】
登録地点定数記憶部14は、運行経路上の所定の地点の識別番号と、当該地点を含む所定の領域を表す緯度経度情報を対応させた登録地点エリア情報を記憶し、登録地点通過判定処理部15は、前記登録地点エリア情報を参照し、移動体11のGPS受信機13により測定された緯度経度情報が、前記登録地点エリア情報のいずれかの領域内である場合は、当該領域に対応する前記所定の地点を当該前記移動体が通過したと判断し、前記GPS受信機13により測定された緯度経度情報を、当該前記所定の地点の識別番号に変換し、送信部11により前記識別番号を基地局12に送信する。基地局12では、受信された前記識別番号をもとに端末画面上に前記移動体11の運行位置情報を表示する。
(もっと読む)
複数の方位線からの物体の位置特定の方法及び装置
物体の場所を求める方法は、複数の観測場所からの物体の方位を表すデータを使用する。この方法は、(a)方位毎に、手順を使用して点の座標を導出することであって、この座標は、所定の場所とその方位線上の最も近い点との間の符号付き距離を表す第1の値pと、その方位線の角度を表す第2の値θとを含み、上記手順に従って、反対方向の同一直線上の方位が、互いに符号が反対である第1の値と、互いにπだけ異なる第2の値とを有する、導出すること、及び、(b)上記点を曲線フィッティングすることを規定するパラメータを導出することであって、当該パラメータは物体の場所を表す、導出することを含む。方位測定に関連付けられる信号対雑音比を表す値と、互いに対して相対的な観測場所を表す値及び物体に対して相対的な観測場所を表す値とを使用して、物体の場所の計算に対するそれらの影響を重み付けする目的で方位をグループ化することができる。  (もっと読む)
(もっと読む)
位置情報提供システム
【課題】 路側に多くのセンサーを配備設置することなく、多くの移動体の所在位置を認知および提供できる位置情報提供システムを提供すること。
【解決手段】 小型電波発信器11からの電波を受信するアンテナ17と、この受信電波を以後の処理方式に合った周波数に変換する周波数変換部18と、アナログ信号をディジタル信号に変換するA−D変換部19と、受信電波の到来方向を推定処理する到来方向推定処理部20と、受信電波の画像処理と前記移動体12との距離を画像演算処理する画像化処理部21と、受信電波の受信範囲内の背景を撮影する撮影部22と、その背景と画像化処理部21による電波の可視化画像とを合成処理する画像合成処理部23と、受信電波の発信位置が位置情報として取得対象か否かを判定する保護対象判定処理部24と、取得された固有情報を解読するRFID受信解読処理部25と、カーナビゲーション位置情報26と固有情報とをVICS入出力部27に出力する位置情報生成処理部28などとからなる。
(もっと読む)
車両走行位置推定システム及び車両走行位置推定方法
【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
(もっと読む)
目標対象物の位置検出装置
【課題】予め目標対象物が撮像される領域の標高データを含む地図データを必要とせず、目標対象物の3次元位置情報を容易に算出できる目標対象物の位置検出装置を提供する。
【解決手段】飛翔体10に搭載され、位置検出する対象目標物3を撮像するための撮像装置11と、飛翔体10に搭載され、撮像装置11が常に鉛直下方の地表面2を撮像すると共に、撮像される画像の向きが常に一定となるように、撮像装置11の姿勢を制御する撮像装置姿勢制御機構12と、飛翔体10に搭載され、撮像装置11の撮像に同期して撮像装置11の位置情報を出力するGPS13とを備え、撮像装置11によって撮像される目標対象物を含む複数の撮像画像と、GPS13から出力される撮像装置11の位置情報に基づいて、目標対象物の緯度、経度および高さの3次元位置情報を算出する。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、測位装置20の移動速度を算出する速度算出手段と、前回測位時からの経過時間が予め規定した許容時間範囲内であり、かつ、前回測位時の移動速度v0が予め規定した第1速度許容範囲内であり、かつ、現在の移動速度v1が予め規定した第2速度許容範囲内であるという静止状態条件βを満たすか否かを判断する静止状態判断手段と、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段等を有する。
(もっと読む)
GPS受信装置
【課題】自車位置の検出に要する時間を短縮することができるGPS受信装置を提供する。
【解決手段】複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置に、所定の移動体から送信された情報を受信する受信手段と、前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段とを備えることにより達成される。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
241 - 260 / 352
[ Back to top ]