
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
221 - 240 / 352
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
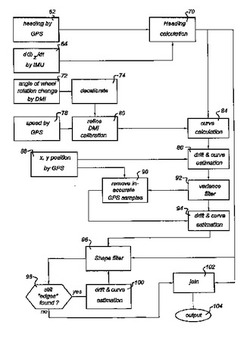
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
ポータプルの測位およびナビゲーション・システム

【課題】未知の領域でのナビゲーションを補助するナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数の無線周波数識別(RFID)タグと、少なくとも1つのポータル端末と、少なくとも1つのナビゲーション・デバイスとを含む。複数のRFIDタグは、移動する領域全体にわたって配置される。少なくとも1つのポータル端末は、移動する領域への入口付近に配置する。少なくとも1つのポータル端末は、移動する領域のマップをアップロードする。マップは、各RFIDタグの位置を含む。少なくとも1つのナビゲーション・デバイスは、ポータル端末からマップをダウンロードする。少なくとも1つのナビゲーショナル・デバイスは、更に、複数のRFIDタグの1または複数のものを検出し、それに少なくとも部分的に基づいて、移動する領域内でのそのデバイスの位置を表示する。
(もっと読む)
位置管理システム
【課題】対象者の位置を検出し管理するシステムにおいて、位置管理方法が屋内と屋外とで相違し、利用者にとって使い勝手が悪い。
【解決手段】携帯端末2にGPS機能と無線タグ40とを搭載する。屋内の管理対象領域にはタグリーダ4を設置し、無線タグ40の存在を検出して、検出情報を管理センタ6へ送信する。管理センタ6は、無線タグ40を検知しているタグリーダ4の位置情報及びGPS機能により取得する位置情報を共通の座標形式で管理する。利用者からの位置確認要求があった場合、タグリーダ4又はGPSによる位置情報が示す位置を表示する地図画像を生成して、利用者へ通知する。
(もっと読む)
自車位置算出装置
【課題】 車速パルス信号を利用することができない車両であっても自車位置を算出可能な「自車位置算出装置」を提供する。
【解決手段】 自車位置算出装置30は、GPS衛星の測位からGPS速度等の情報を生成するGPS測位情報作成部50と、車両34からの車速パルス信号が入力されず、かつGPS測位情報生成部50から得られたGPS速度が変化したとき、車速パルス信号を利用することができないと判定する判定部52と、車速パルス信号を利用することができないと判定されたとき、GPS速度に基づき擬似車速パルス信号を生成する擬似車速パルス信号生成部54と、擬似車速パルス信号に基づき自車位置を算出する自車位置算出処理部42とを含んで構成される。
(もっと読む)
GPSの精度を自動的に向上するナビゲーション装置
本発明は、位置測定装置から位置情報を受信するように構成されるプロセッサを具備するナビゲーション装置に関する。プロセッサは、運動検出器から運動情報を受信し、前記運動情報を使用して前記装置が静止中であるかを判定するように更に構成される。装置が静止中であると判定された場合、プロセッサは、装置が静止中である期間に位置測定システムから受信される連続した位置に関する情報を使用してある期間にわたる平均位置を計算する。平均位置は、ユーザに命令を与える等のナビゲーションの目的で使用される。静止中に平均することにより、更に適切な命令を与えるために使用される更に正確な位置が判定される。 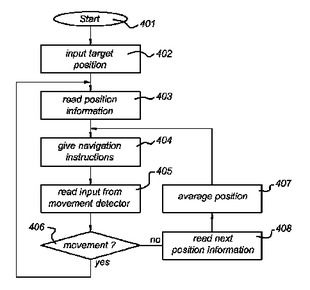 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】車両のエンジンが起動された後、直ちにナビゲーションすることができるとともに、効率的に測位することができ、ポータブル型であっても適用が容易なナビゲーション装置を提供する。
【解決手段】現在位置を測位するGPSアンテナ12や測位プログラム18b1を実行したCPU11と、地図情報を記憶する地図情報データベース18a1と、当該測位された現在位置を、当該記憶された地図情報とともに表示部13に表示させる表示制御プログラム18b2を実行したCPU11と、を備えるナビゲーション装置1において、ナビゲーション装置1が使用開始される時間帯を設定する時間データテーブル18a2や設定プログラム18b3と、当該設定された時間帯よりも所定時間前に、GPSアンテナ12や測位プログラム18b1を実行したCPU11による現在位置の測位を開始させる開始制御プログラム18b4を実行したCPU11と、を備えるよう構成した。
(もっと読む)
測位装置、カーナビゲーション装置及び測位方法
【課題】簡易に正確な受信機の位置を検出することが可能な「測位装置」、「カーナビゲーション装置」及び「測位方法」を提供する。
【解決手段】制御部102は、GPS受信機50によって受信される信号の送信元のGPS衛星を4個ずつ組み合わせた場合における全ての組み合わせ毎に、当該組み合わせに属する4個のGPS衛星からの信号に対応するGPS情報に基づいて、車両位置を検出し、これら組み合わせ毎に検出された車両位置に基づいて、マルチパスが発生しているGPS衛星を特定し、そのGPS衛星以外のGPS衛星からの信号に対応するGPSに基づいて、車両位置を検出する。
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
車載用ナビゲーション装置及び車両進行方向検出方法
【課題】バック信号を取得するためのアダプタ等の特別なハードウェアを必要とせずに、バック信号を取得できない場合であっても自車の進行方向を正しく判定可能とし、自車位置精度の向上に寄与することができる「車載用ナビゲーション装置及び車両進行方向検出方法」を提供すること。
【解決手段】衛星航法及び自立航法を利用した各測位機能を併用して自車位置を決定する車載用ナビゲーション装置において、自立航法による測位機能に基づき検出した車速と、衛星航法による測位機能に基づき検出したGPS方位をモニタし、該車速がしきい値以上になったときに自車は「前進」していると判定し(S3,S4)、該車速がしきい値未満でGPS方位の変化量がしきい値以上になったときに、自車は「前進」から「後進」に、あるいはその逆の状態に切り替えられたものと判定する(S6,S7)。
(もっと読む)
位置情報取得装置、位置情報取得方法、および、端末装置用プログラム
【課題】帯域内ノイズの影響を軽減して測位解の精度改善を実現する。
【解決手段】第一の条件を満たす信号をGPS信号として捕捉・追尾する信号捕捉追尾手段と、該捕捉・追尾された追尾信号を用いて測位を行い、該移動体の位置情報を算出する位置情報算出手段と、該算出された位置情報に基づいて該移動体が所定の場所に位置するか否かを判定する移動体位置判定手段と、移動体位置判定手段により該所定の場所に位置すると判定されるときに、GPS信号を捕捉・追尾するための条件を該第一の条件と異なる第二の条件に変更する捕捉追尾条件変更手段とを具備し、信号捕捉追尾手段が、移動体位置判定手段により該所定の場所に位置すると判定されている期間中、該第二の条件に基づいて信号捕捉・追尾を行う位置情報取得装置を提供する。
(もっと読む)
自動車の走行制御システム、および、車両制御装置
【課題】車両制御のために、地物を早い時期に高精度で認識すること。
【解決手段】車両制御装置100は、車両10の周辺の地物を認識して道路環境の情報を取得する第1の道路環境情報取得手段と、前記第1の道路環境情報取得手段で認識した地物とは異なる地物を認識して道路環境の情報を取得する第2の道路環境情報取得手段と、前記第1の道路環境情報取得手段により取得した第1の道路環境情報と前記第2の道路環境情報取得手段により取得した第2の道路環境情報に応じて自車前方の道路環境を認識する道路環境認識手段と、を有することを特徴とする。
(もっと読む)
ナビゲーション装置および位置算出方法
【課題】位置情報送信ユニットからの位置情報から現在位置を取得するナビゲーション装置において、より正確な位置情報を得ることができるナビゲーション装置を提供する。
【解決手段】位置情報送信ユニット100はナビゲーション装置30に近距離無線通信規格に基づき位置情報を送信する。ナビゲーション装置30は経路探索サーバ20から案内経路を受信する。ナビゲーション装置30において、位置情報取得部34、位置算出部35、方位検出部36を備え、位置算出部35は、位置情報を受信した位置情報送信ユニット100の通信エリアに入る時、出る時に、通信エリアの円とリンクの交点のうち、方位検出手段36が検出した方位と合致する交点をそれぞれ現在位置として算出する。
(もっと読む)
位置検出サービス品質インディケータ
移動体ワイヤレス・デバイスは、位置検出に基づくサービスによって用いるために、計算した位置検出推定値の品質を示す位置検出サービス品質インディケータ(QoSI)を供給するように構成されている。QoSIは、デバイス自体によって、または位置検出対応サーバ(LES)のようなサーバによって計算することができる。QoSIは、予測位置検出精度、可用性、レイテンシ、精密度、および/または歩留まりを表すために用いることができる。 (もっと読む)
車両の精確な測位システム
【課題】車両の高速走行時において全地球測位システムの出力する車両座標が時間間隔が大き過ぎることにより生じる極大誤差の問題を解決、また、測位衛星信号が受信不能である時に生じる位置誤差問題を解決することを特徴とする車両の精確な測位システムの提供。
【解決手段】本発明は車両の精確な測位システム及びその方法に関するもので、車両上に取付けて使用するものであり、それは、全地球測位システム11、ジャイロスコープ21、車両速度測定装置22、制御器3により構成される。全地球測位システム11が次の全地球測位座標を出力すると、制御器3は車両のジャイロスコープ21及び車両速度測定装置22に基づいて次の参考位置座標を算出、並びに、制御器3は次の全地球測位座標と次の参考位置座標の二点間距離dを算出、続いてそれらを比較し二点間距離dが特定距離rを超えた場合、制御器3は次の全地球測位座標を次の精確位置座標として指定し出力する。逆の場合、制御器3は次の参考位置座標を次の精確位置座標として指定し出力する。
(もっと読む)
キロポスト表示器
【課題】高速道路を走行中に2箇所のキロポストを知ることができる装置を提供する。
【解決手段】本発明によるキロポスト表示装置は、キロポストとその位置の関係を示すテーブルと、GPS信号より現在位置を検出するGPS受信装置と、現在のキロポストと時刻を表示する表示装置と、ホールドボタンとを有し、時刻t1にて上記ホールドボタンを押すと、時刻t1におけるキロポストと時刻が表示され、時刻t1から所定時間経過後の時刻t2に上記ホールドボタンを押すと時刻t1におけるキロポストと時刻と共に時刻t2におけるキロポストと時刻が表示される。
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】従来技術に比較して正確にマルチパス判定処理を行い、高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マルチパス判定楕円算出器23と、位置及び速度算出器22とを備える。マルチパス判定楕円算出器23は、現在位置とナビゲーション装置10の進行方向とに基づいてマルチパス判定楕円を算出する。位置及び速度算出器22は、受信無線信号のGPS衛星からナビゲーション装置までの伝搬距離とマルチパス判定楕円とに基づいて、受信無線信号がマルチパス合成信号であるか否かを判定するマルチパス判定処理を実行し、マルチパス合成信号でないと判定されたGPS衛星からの受信信号に基づいて自車位置を算出する。
(もっと読む)
プログラム、測位回路及び電子機器
【課題】マルチパス環境における測位誤差を考慮に入れた、より高精度な測位を実現する
こと。
【解決手段】捕捉したGPS信号に基づいて4つの補正衛星の組合せである衛星組合せが
抽出され、各衛星組合せそれぞれについて、当該衛星組合せを用いた場合の現在位置が計
測される。そして、抽出された衛星組合せのうち、前回最適組合せと判定された衛星組合
せが選定組合せとして選定され、当該選定組合せについての計測結果がマップマッチング
処理部に出力される。そして、抽出された衛星組合せそれぞれの計測結果と、マップマッ
チング処理部から入力されたマップマッチング結果である位置情報とに基づいて、マップ
マッチング結果に最近接する計測結果となった衛星組合せを今回の最適組合せとして判定
する。
(もっと読む)
方位補正装置、方位補正方法、方位補正プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】方位誤差の蓄積を防ぐとともに、方位補正の最適化を図ること。
【解決手段】検知部301は、移動体が直進していることを検知し、検出部302は、検知部301によって直進を検知した場合、移動体の移動方向に関する移動方位を検出する。また、算出部303は、検知部301によって直進を検知した場合、移動体の周辺道路の敷設方向に関する道路方位を算出する。そして、比較部304は、検出部302によって検出された移動方位と、算出部303によって算出された道路方位とを比較して、補正部307は、比較部304によって比較された結果に基づいて、移動方位を補正する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
221 - 240 / 352
[ Back to top ]