
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
261 - 280 / 352
地図評価装置および地図評価方法
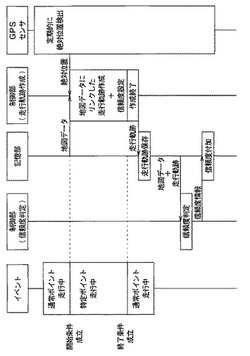
【課題】ナビゲーション装置等で用いられる地図データの信頼度を評価する。
【解決手段】絶対位置検出手段により車両の絶対位置を検出し、検出された車両の絶対位置に基づき、地図データ記憶手段に記憶されている地図データの表す道路地図を基準とした車両の位置を取得し、車両の走行に伴い検出された車両の絶対位置を、車両の走行軌跡情報として、道路地図を基準とした車両の位置と関連づけて記憶し、記憶された走行軌跡情報と、道路地図を基準とした車両の位置とを比較し、車両の絶対位置を基準とした場合における地図データの誤差である地図データの信頼度を、地図信頼度として設定する。
(もっと読む)
位置算出装置の誤差円の決定方法

【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
測位端末
【課題】測位端末において、測位結果の表示にかかる時間や通信コストを削減し、異なる測位方式であっても単一の端末で測位可能とする。
【解決手段】測位端末1は、自律測位部11、無線測位部12、推測航法部13、位置補正部14、測位演算部15、位置情報表示部16および測位ソフトウェア記憶部18を備える。自律測位部11が測位端末1の所持者の歩行動作に応じて慣性データを出力し、推測航法部13がその慣性データから位置情報を推定する。一方、無線測位部12および測位演算部15は、測位ソフトウェア記憶部18からロードされた測位ソフトウェアをCPUが実行することによって動作し、無線信号の周波数、変調方式、測位方式に応じて無線信号の受信、復調、測位演算などを行う。位置補正部14は、推測航法部13および測位演算部15から入力した位置などから位置情報を補正する。そして、位置情報表示部16が、位置情報を表示する。
(もっと読む)
迷子捜索システム、探索端末装置、探索端末装置の制御方法、探索端末装置の制御プログラム及び探索端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】高層ビル内において、迷子を効率的に探索することができる迷子捜索システム等を提供すること。
【解決手段】被探索端末装置20は、測位電波を使用して測位位置を3次元で示す測位位置情報を生成する測位位置情報生成手段を有し、探索端末装置40は、被探索端末装置から、測位位置情報156を受信する測位位置情報受信手段と、測位位置情報に含まれる経度情報及び緯度情報を使用して、測位位置を2次元表示する2次元表示手段と、予め規定した規定時間において、経度情報及び緯度情報に変化があるか否かを判断する2次元情報評価手段と、2次元情報評価手段が、経度情報及び緯度情報に変化がないと判断した場合には、経度情報、緯度情報及び測位位置情報に含まれる高度情報を使用して、測位位置を3次元表示する3次元表示手段と、を有する。
(もっと読む)
GPS受信装置
【課題】指向性の設定処理を単純化して高速な追従処理を実現する。
【解決手段】指向性を変更可能な複数のアンテナ部と、複数のアンテナ部の各々に受信された複数のGPS信号に基づいて自己の現在位置を算出する自己位置算出手段と、自己の向きを算出する向き算出手段と、算出された現在位置、向き、及び、受信されたGPS信号に基づいて、自己に対して各GPS衛星が位置する方向を算出する衛星方向算出手段と、衛星方向算出手段により算出された方向に基づいて、複数のアンテナ部の各々がそれぞれ異なる一機のGPS衛星に対して指向性を持つよう設定する指向性設定手段とを備えたGPS受信装置を提供する。
(もっと読む)
通信端末
【課題】GPSにより取得した測位データを選別可能な通信端末を提供する。
【解決手段】測位ポイントPnで測位した後(S25)、前回、取得した有効な測位ポイントPaと、今回測位したPnとの距離差Ldを算出する(S26)。算出した距離差Ldが、移動体の限界移動距離L以下のときに、測位ポイントの測位データを有効と判断し(S27にてYES)、地図上へのロギングをする(S32)。
(もっと読む)
移動通信装置位置決めシステム及び方法
【課題】位置決め信号を比較及び計算する必要がないようにした移動通信装置位置決めシステムを提供することにある。
【解決手段】この移動通信装置は、制御装置と、信号送受信機と、位置決め受信機と、表示部を具える。この場合、位置決め受信機はグローバルポジショニングシステム(GPS)から送信される位置決め信号を受信する。位置決め受信機に結合している信号送受信機は位置決め信号を外部デバイスに送信するように構成される。信号送受信機は外部デバイスから位置決め信号によって決定する位置決め関連情報も受信する。制御装置は信号送受信機と、位置決め受信機と、表示部にそれぞれ接続する。更に表示部は位置決め関連情報を表示するためにある。
(もっと読む)
航法マップの補完装置及び方法
【課題】航法マップの補完装置及び方法を提供する。
【解決手段】本発明に係る航法マップの補完装置は、航法マップにおいて詳細情報が欠如した所定地域の地形及び経路を含む画像を外部から獲得する画像獲得部と、画像から通行路及び位置把握の基準となる客体を抽出して、画像を経路探索の可能な航法マップ形態に変換し、変換された航法マップ形態の画像情報に基づいて所定地域の詳細情報部分を形成して航法マップを補完する航法マップ補完部と、補完された航法マップに基づいて画像が撮られた地域の経路を案内する経路案内部と、経路探索者が実際の経路と経路案内部により案内された経路とを比較して不一致がある場合、不一致がある経路の修正経路を経路探索者から入力されて航法マップを更新する航法マップ更新部と、を備える航法マップの補完装置である。
(もっと読む)
移動情報端末位置監視方法および移動情報端末位置監視システムならびに移動情報端末
【課題】携帯電話機のような移動情報端末の所在位置を監視する場合、移動情報端末側での消費電力を低減して、極力長時間に亘って正常な作動状態を維持することができる移動情報端末位置監視方法を提供する。
【解決手段】携帯電話機(移動情報端末)201が基地局101〜106との交信によってその位置を捕捉可能な行動エリア301内にあるときには、相対的に消費電力の少ない基地局との交信動作によってその所在位置を検出し、基地局101〜106との交信によって行動エリア301を逸脱した蓋然性が高いと弁別されたときにはGPSを利用した測位によって高精度で位置を捕捉し、行動エリア逸脱の旨の通報および/またはその位置を表す情報を、予定した通報先に送信する。
(もっと読む)
移動局の位置検出方法、緊急通報システム及び防犯サービスシステム
【課題】移動局と少なくとも一つの基地局らなる無線通信ネットワーク上において、検出精度の高い移動局の位置検出方法を得る。
【解決手段】ステップS44〜S46の処理が第1及び第2サンプリング時点において実行されることにより、距離検出ステップS44では、移動局1と基地局2との電波伝搬遅延時間34に基づき、第1及び第2サンプリング時点それぞれにおける移動局1と基地局2との距離(移動局基地局間距離)が算出される。一方、時系列変化検出ステップS46において、ステップS45で得た加速度と方位に対し時系列の変化の積分処理を行い、第1及び第2サンプリング時点間における移動距離、移動方向を検出する。そして、ステップS47で、第1及び第2サンプリング時点それぞれにおける移動局基地局間距離と、第1及び第2サンプリング時点間における移動距離、移動方向に基づき、移動局1の位置を検出する。
(もっと読む)
移動個体管理システム
【目的】 公共移動通信情報網が通信不可能な地域に所在する鳥獣等の野生動物、人、車両等の基本的に移動する移動個体をリアルタイムで所在を確認及び管理するとともに、その動態を管理し、さらにそれらの行動管理を行うとともに移動個体が関係する地域生活の安全管理等に必要な情報管理を行うものである。
【構成】 1又は複数の行政区域を含む地域Aに所在する移動個体01の行動の管理と、この管理により地域Aの安全等を図るシステムであって、地域Aに所在する移動個体01に装着される無線情報端末1と、端末1から発信される時間、位置情報等を含む移動個体情報信号10を受信し、管理するデータ管理装置2と、移動個体情報信号を通信する通信手段からなり、データ管理装置2は移動個体01の移動に基づく端末1の行動管理、地域Aの安全管理等を目的とする1又は複数の管理地域を選定しこの選定された管理地域の安全等を管理する。
(もっと読む)
ナビゲーション装置
【課題】車両の現在位置が正しい道路上に表示されるようにすることにある。
【解決手段】現在位置測定部12がデッドレコニング処理によって算出した車両の現在位置および進行方位が採用し続けられる地域(例えば立体駐車場)に車両が進入した場合、マップマッチ候補道路検出部17は、前記移動体が該地域から脱出した場合に走行する可能性の高い道路の道路情報をマップマッチ候補道路18に登録する。移動体が該地域から脱出した後、信頼度決定部13から出力される現在位置および進行方位のデータを選択部14が選択する前に、マップマッチ処理を行う際には、マップマッチ候補道路18に登録されている道路情報を用いる。
(もっと読む)
歩行者移動支援装置
【課題】 外出中の徘徊癖のある歩行者等の位置などを常時検出し、走行中の自動車等に報知する歩行者移動支援装置を提供する。
【解決手段】 携帯送信機100から常時発信する歩行者のID情報を、複数箇所に設けた中継局110によって受信して受信の方向角を判定し、ID情報と受信の方向角を本部120に送信する。本部120は受信の方向角を解析して歩行者の位置を特定する。本部は歩行者の位置情報を中継局を介して周囲に送信し、自動車等に搭載した歩行者認識装置150が位置情報を受信して音声等の形態で出力し、自動車の運転者などに歩行者を認識させる。また、本部は、歩行者の危険地区への接近など、移動中の安全性を解析し、位置情報に付加して送信する。
(もっと読む)
移動体のナビゲーション装置及び移動体の現在位置算出方法
【課題】 マルチパスの影響を排除することで、より高い精度で現在位置を検出することが可能な移動体のナビゲーション装置及び移動体の現在位置算出方法を提供する。
【解決手段】 ナビゲーション装置10を備える車両の現在位置算出方法として、車両の現在位置を検出するための自律航法センサ5と制御部17とからなる自律測位手段が新たに算出した自律測位データの誤差範囲を、新たな現在位置の予測エリアデータとして算出するステップと、車両の現在位置を検出するためのGPS受信部4が新たに算出したGPS測位データが、予測エリアデータに含まれるかどうかを判定するステップと、GPS測位データが予測エリアデータに含まれないと判定した場合に、自律測位データを利用して現在位置を示す現在位置データを新たに算出するステップとを有する。
(もっと読む)
移動体端末装置およびプログラム
【課題】屋内外の測位結果を混同することなく、利用者(移動体端末装置)の所在地に応じた的確な地図データを表示する。
【解決手段】2以上の測位デバイス1、2を備えた移動体端末装置が、それぞれの測位デバイス1、2を使用して測位演算した結果得られる移動体端末装置のそれぞれの地図上における場所と、そのとき測位演算に使用した測位デバイスと1、2を測位状態として測位状態保持部32に所定の期間保持し、測位状態判定部33が、それぞれの測位デバイス1、2から受信した情報によって位置付けられる地図上における場所への状態遷移を、測位状態保持部32に保持された直前の測位状態を含む履歴から判定する。
(もっと読む)
端末装置、外部装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】自立型センサを有しないにもかかわらず、精度のよいマップマッチング結果を出力することができる端末装置等を提供すること。
【解決手段】観測可能衛星情報に基づいて、端末装置20の現在位置の測位に使用する測位衛星12a等の組である測位衛星組G1等のすべてを示す全衛星組情報を生成する全衛星組情報生成手段と、全衛星組情報に示される測位衛星組のすべてについて、測位を行って各測位衛星組に対応する測位位置P1等のすべてを示す全測位位置情報を生成する全測位位置情報生成手段と、すべての測位位置について、マップマッチングを行って、出力候補位置Pm1等を示す出力候補位置情報を生成する出力候補位置情報生成手段と、マップマッチングにおける補正が最も小さい出力候補位置を出力位置として選択し、出力位置を示す出力位置情報を生成する出力位置情報生成手段と、出力位置情報を出力する出力位置情報出力手段と、を有する。
(もっと読む)
他車両位置検出装置
【課題】 他車両の位置をすばやく検出することができる他車両位置検出装置を提供する。
【解決手段】 通信部1を介して受信した自車両におけるGPS座標と、マップマッチングによって算出された自車両における補正後の位置座標との差をGPS誤差として算出し、該GPS誤差を用いて、他車両から取得したGPS座標の補正を行うことによって他車両の正確な位置を算出するものとしたので、他車両からGPS座標を取得すると、あらかじめ算出されたGPS誤差を用いて即座に他車両のGPS座標の補正を行い他車両の位置を検出することができる。
(もっと読む)
位置特定装置、ナビゲーション装置およびナビゲーションシステム
【課題】 高い位置精度の位置特定を行うことができるAM波等の地上波を利用した位置特定装置を提供する
【解決手段】 各発信局の位置に関する情報と各発信局の搬送波周波数の情報とを対応付けて記憶する発信局情報記憶部42と、全発信局から同時送信される同期送信波を受信する受信部43と、受信した各同期送信波の搬送波周波数を抽出し各同期送信波の送信元の発信局を識別する発信局識別部44と、受信した各同期送信波に重畳されている信号波の位相を検出する位相検出部45と、検出された信号波間の位相差および発信局情報記憶部に記憶された各発信局の位置情報に基づいて現在の位置を算出する位置算出部46とを備える。
(もっと読む)
261 - 280 / 352
[ Back to top ]