
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
281 - 300 / 352
測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体、測位装置
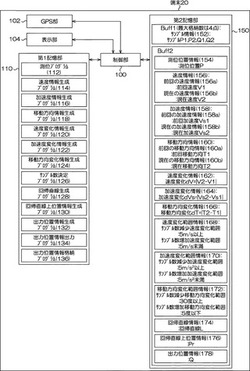
【課題】移動しつつ現在位置を計算する場合において、出力位置の直進性、連続性及び追従性を向上し、真の位置との乖離が小さい出力位置を算出することができる測位装置の制御方法等を提供すること。
【解決手段】測位装置20が、測位位置情報生成ステップと、測位装置20が、速度情報、加速度情報及び進行方向情報の少なくとも1つを構成要素とする移動状態情報を生成する移動状態情報生成ステップと、測位装置20が、移動状態情報に示される構成要素の変化を示す移動状態変化情報を生成する移動状態変化情報生成ステップと、測位装置20が、移動状態変化情報に基づいて、回帰直線Lを生成するための基礎情報の数を決定する基礎情報数決定ステップと、測位装置20が、回帰直線を生成する回帰直線生成ステップと、測位装置20が、現在時刻における回帰直線L上の位置を示す回帰直線上位置情報を生成する回帰直線上位置情報生成ステップ等を有する。
(もっと読む)
障害物検知システム、障害物検知方法、プログラム

【課題】障害物を確実に検知するとともに航行者にその旨を適切に通知する。
【解決手段】 航行中にある航行体が障害物を検知すべく当該航行体に設けられる障害物検知システムにおいて、航行区域内に含まれる前記障害物の位置情報を記憶する記憶部と、人工衛星より受信した航法信号に基づいて前記航行体の現在位置を検出する位置検出部と、前記検出された航行体の現在位置に基づいて前記記憶部より現在の前記航行体の近傍に位置する前記障害物を検索する障害物検索部と、当該障害物が検索された場合に警報を出力する警報出力部と、を有する。
(もっと読む)
移動体のエリア監視システム
【課題】 農耕地等における野生動物の被害を有効に防止する移動体監視システムを提供する。
【解決手段】 移動体装着体1と移動体監視基地5を有し、前記移動体装着体1は少なくともGPS受信部と無線通信部とコントローラーユニットとを備え、前記移動体監視基地5は少なくとも無線通信部と演算部と警報発信部とを備え、前記移動体装着体1がGPS衛星からの測距信号を受信して、測位情報を算出し、前記移動体監視基地5に測位情報を送信し、前記移動体監視基地5が受信された測位情報に基づき移動体の位置情報を算出し、移動体が所定の地域に出現した時に警報を発することを特徴とする移動体のエリア監視システムであり、好ましくは前記移動体装着体1及び前記移動体監視基地5の双方に送受信可能な無線通信部を有する中継基地3が1以上配置された移動体のエリア監視システムである。
(もっと読む)
位置補正方法及びナビゲーション装置
【課題】 GPS等によって推定した自動車の鉛直方向の位置を精度良く補正することができる位置補正方法、及びナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置1は、自動車(移動体)が受ける重力加速度の進行方向の成分を重力センサ13で測定し、測定した成分の大きさ及び向きにより、自動車が進行する向きの傾斜角を求め、各瞬間での傾斜角及び車速パルスから、自動車が移動することによる鉛直方向への変位量を求める。ナビゲーション装置1は、求めた鉛直方向への変位量に基づいて、GPSにより推定した自動車の鉛直方向の推定位置を補正し、更に鉛直方向の情報を含む地図データを用いてマップマッチングを行うことにより、自動車の推定位置を精度良く補正する。
(もっと読む)
ナビゲーション装置
【課題】 自立航法用センサからの距離情報を利用できない場合であっても、自車位置を精度良く算出することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
(もっと読む)
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
電波発射源表示装置
【課題】電波発射源の位置を容易に検知できる電波発射源表示装置を提供すること。
【解決手段】電波発射源Tが発射する電波を受信する電波受信部20と、この電波受信部20が受信した受信信号をもとに、電波発射源Tの方向と位置を測定する方位距離測定部30と、電波発射源Tを含む領域の地図データを表示し、かつその表示した地図データ上に電波発射源Tの方向と距離から求めた位置を重ねて表示する表示部60とを具備している。
(もっと読む)
可動物体、特に空港での航空機の地上位置を決定するための方法および装置
本発明は、位置データを周期的に発生するための手段(2)と、慣性データを発生するための手段(3)と、位置データの発生毎にこの位置データに基づき可動物体の位置を決定するための手段(4)と、位置データの2回の連続発生間での可動物体の位置を決定するための手段(5)とからなる装置(1)に関し、上記の2回の連続データ発生間の時隔が、中間時間のより分離される、同じ長さの時間範囲に分割され、上記の手段(5)が、各現在の中間時間に対し、以前の中間時間におけるその位置と、現在と以前の中間時間により形成される時間範囲中のその移動とに基づいて可動物体の位置を決定し、その物体の移動が慣性データにより計算される。 (もっと読む)
空港内で航空機の地上運航を補助するための装置
本発明は、航空機の現在位置を決定するための手段(2)と、地図製作データベース(3)と、運航システム(4)と、航空機の現在の方向を決定するための手段(9)と、監視スクリーン(8)上に少なくとも空港の一部の地図と、その地図上に、前記現在位置に対応する個所に位置し、現在の進行方向を指し示す航空機のシンボルとを表示する表示システム(6)とからなる装置(1)に関するものである。 (もっと読む)
防災システム
【課題】 災害時、救済活動に有効な情報(例えば、人の存在、存在場所、移動方向等)を提供し得る防災システムを提供する。
【解決手段】 防災システム(10)は、3Dスキャナ(16)を用いて取得された構造物(12)の三次元座標データを含む基礎データ(14)を記憶する記憶部(48)と、構造物(12)の内部に存在する発信器(26)の三次元座標を演算する演算部(54)と、基礎データ(14)に基づいて構造物の画像をディスプレイ(36)に表示させると共に、ディスプレイ(36)に表示された構造物(12)の座標系上の位置であって発信器(26)の三次元座標に対応する位置に、発信器(26)に対応する特定画像(58)を表示させる画像合成部(56)を有する。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】場面に応じて必要とする測位精度の測位部を選択できるようにする。
【解決手段】高精度の第1測位部21と第1測位部よりも精度の劣る第2測位部22とを切替部24が切り替え、切り替えられた測位部が測位する。切替部24は、選択判定部34が出力する判定信号に従って切り替える。判定条件記憶部32は、判定条件として、移動体情報端末が装備された移動体の速さと所定の設定値との大小関係を示す判定条件式を記憶している。判定条件設定部33は、前記判定条件式を用いて判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は、前記判定条件信号を入力し、また、車速検知部90から前記移動体の速さを入力し、入力した速さが前記設定値以下のときは第1測位部を選択するべき判定を行ない、入力した速さが前記設定値よりも大きい場合には第2測位部を選択するべき判定を行ない、判定結果を判定信号として出力する。
(もっと読む)
自走式の作業機械及び自走式の作業機械の遠隔操縦システム
【課題】一つのGPSの移動で車体の向きに係る情報を取得する場合に同情報の中から正確な情報を選別して取得できる自走式の作業機械を提供する。
【解決手段】遠隔操作器25で遠隔操縦されGPSアンテナ14及びGPSレシーバ15を有するGPSを車体1に設置し、GPSでのGPSアンテナ14の位置の検出結果を工事事務所20側へ逐次送信しながら移動する自走式の作業機械において、GPSアンテナ14を第1の位置から第2の位置へ水平移動させる水平移動装置17と、走行停止を検出する走行状態検出手段と、走行状態検出手段での検出結果に基づいて走行停止が判別されたときに水平移動装置17でGPSアンテナ14を第1の位置から第2の位置へ移動させる制御用コントローラ12とを設け、走行停止が判別されたときにGPSアンテナ14の第1の位置及び第2の位置に係る各水平位置のデータを取得するように構成した。
(もっと読む)
車載用ナビゲーション装置
【課題】 絶対傾斜角を検出することによって、傾斜を有する地点においても自車位置を高精度に検出することができ、ひいては、自車を目的地まで迅速かつ適切に案内することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】 自車の進行方向に対する自車の絶対的な傾斜角度である絶対傾斜角を計算する絶対傾斜角計算手段32と、この絶対傾斜角計算手段32によって算出された前記絶対傾斜角に応じたジャイロセンサ6の感度の補正を行う補正手段33とを備えたこと。
(もっと読む)
アップリンク干渉源位置特定装置及びその方法
【課題】 アップリンク干渉源の位置を短時間で容易にかつ精度よく特定可能とする。
【解決手段】 2つの受信アンテナ10〜11で、2つの衛星経由のダウンリンクを受信し、2系統での受信信号を同時にADサンプリングしてデジタルデータを取得し、相関処理部40にて、到達時間差、ドップラ周波数差を算出するための相関処理を行う。一方、衛星位置算出処理部50にて、電波を受信している2衛星の測定した時刻における位置を算出する。発射源位置推定処理部60にて、相関処理部40で得た到達時間差、ドップラシフト周波数差の情報と、衛星位置算出処理部50で得た測定時刻における衛星位置、速度の情報を用いて、地上局の位置を推定し、表示部70にて、到達時間差の軌跡とドップラ周波数差の軌跡との交点の座標を地図上にプロットして、電波発射源の位置推定結果を表示する。
(もっと読む)
位置管理装置および位置管理プログラムおよび位置管理方法
【課題】 基準点の位置を基準として算出した測量点の位置である測量位置を使用するシステムなどにおいて、基準点の位置変更に対して柔軟に対応できるようにするため、測量した位置の情報および基準点の位置情報を管理することを目的とする。
【解決手段】 記憶部120は、基準点についての複数の位置のそれぞれを基準位置として記憶し、測量点の基準点に対する相対的な位置を関連付けて記憶する。位置要求装置200の要求に基づき、使用する基準位置を選択して測量点の測量位置を算出する。任意に基準位置を選択することができるため、使用する基準点の位置が変更された場合に、再度、測量点の位置などを測量することなく測量位置を算出することが可能である。
(もっと読む)
相互相関データから位置情報を計算し、表示する方法及びシステム
【課題】相互相関データから位置情報を計算して表示する方法及びシステムを提供すること。
【解決手段】複数のレシーバ(102,104)の中から2以上のレシーバを選択し、各レシーバから信号データを得る。選択されたレシーバにおけるレシーバ対のそれぞれについて、信号データの相互相関を求める。各相互相関の結果を組み合わせ、グラフィックインジケータ関数にマッピングする。グラフィックインジケータ関数は、各相互相関計算の結果を使用して、位置情報の視覚表現(300)を生成する。そして、視覚表現(300)をユーザに対して表示する。視覚表現(300)と共に、又はコマンドに応答して、更なる位置情報を表示する場合もある。
(もっと読む)
無線通信網とA−GPS方式を用いた移動通信端末機の位置決定の性能評価方法及びシステム
無線通信網とA-GPS方式を用いて移動通信端末機の位置を決定する際,IS(Interim Standard)-801-1規格の各種パラメータを用いてLBS(Location Based Service)無線通信網の位置決定に関する性能を総合的に評価するための方法及びシステムに関し,LBS無線網分析プログラムは,所定のコンピュータ言語でコーディングされており,LBSメッセージを分析して1つ以上の基準により分析メッセージを表示し,無線通信網と関連した情報,GPS人工衛星情報及びLBSメッセージに含まれた測位座標値をテキスト及び/またはイメージに加工して表示する。  (もっと読む)
(もっと読む)
車載用ナビゲーション装置
【課題】分岐する2本の道路のなす角度が微小であっても分岐後の自車位置を高精度に表示できる「車載用ナビゲーション装置」を提供する。
【解決手段】車載用ナビゲーション装置は、メモリ手段と、走行状態検出手段と、GPS受信手段と、制御手段とを有する。前記制御手段は、第1の道路上の分岐点での第2の道路のなす角度が所定の分岐角度より小さく(S11)且つ分岐後の前記第1の道路と第2の道路のなす角度が所定の角度より小さい(S12)場合において、自車位置が前記第1又は第2の道路に進入したことを検出したときに、GPS測位点を中心とした誤差円を所定の割合で段階的に小さくしながら(S15)該誤差円の範囲内に前記自車位置が存在するか否かを判定し、当該誤差円の範囲から自車位置が外れたときに該自車位置を前記第1又は第2の道路のうち当該誤差円の範囲内の道路にマッチングさせる。
(もっと読む)
測位システム及び測位方法及び移動体端末及び地図サーバ装置
【課題】 例えば、移動体端末がより短時間で測位衛星を捕捉することを目的とする。また、例えば、移動体端末が閉空間から開放空間に移動した直後の測位精度を向上させることを目的とする。
【解決手段】 受信装置700は、GPS衛星500から航法データを受信し、航法データの軌道情報を送信する。無線LANアクセスポイント600は、受信装置700が送信した軌道情報を携帯電話機300に伝送する。携帯電話機300は、無線LANアクセスポイント600から軌道情報を受信する。携帯電話機300は、閉空間から開放空間に移動すると、GPS衛星500から航法データを受信する。携帯電話機300は、受信装置700から受信した軌道情報とGPS衛星500から受信した航法データとを用いて測位を行う。
(もっと読む)
位置補正装置および位置補正プログラムおよび位置補正方法
【課題】 ある地点の位置を実際に測定し、測定した地点が過去に作成した地図のどの位置にあるのかを表す。この場合、過去に地図を作成した時点と位置を測定した時点とでは、地殻変動などにより各地点の位置が変化している場合がある。そこで、測定した地点を過去の地図における位置に高精度に補正し、配置することを目的とする。
【解決手段】 位置補正装置630は、過去に作成した地図の基準点の位置から測定した時点の基準点の位置への移動量を算出する。位置補正装置630は、算出した移動量に基づき、移動量が等しい線を結んだコンター図などのグラフを生成するなどして、移動量から補正情報を生成する。生成した補正情報に基づき、測定した地点の位置を補正することで、測定した地点を過去の地図における位置に高精度に補正し、配置することが可能である。
(もっと読む)
281 - 300 / 352
[ Back to top ]