
Fターム[5J070AA03]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | 遠隔制御又は操作 (21)
Fターム[5J070AA03]に分類される特許
1 - 20 / 21
車両検出装置、通信装置、および、車両検出システム
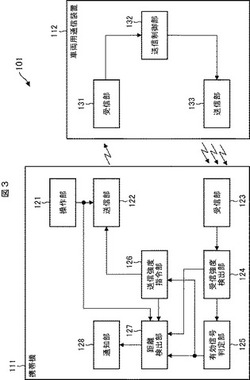
【課題】車両までの距離の検出精度を向上させる。
【解決手段】車両用通信装置112は、送信強度が異なる複数の距離検出用信号を送信する送信部133、携帯機111からの指令を受信する受信部131、携帯機111からの指令に基づいて、距離検出用信号の送信強度を調整する送信制御部132を備える。携帯機111は、各距離検出用信号を受信する受信部123、各距離検出用信号の受信強度を検出する受信強度検出部124、受信強度が有効範囲内にあるかどうかを判定する有効信号判定部125、受信強度が有効範囲外である距離検出用信号の送信強度の調整を指令する送信強度指令部126、受信強度が有効範囲内である2以上の距離検出用信号の受信強度に基づいて、車両までの距離を検出する距離検出部127を備える。本発明は、例えば、カーファインダシステムに適用できる。
(もっと読む)
アンテナ配置算出装置

【課題】アンテナを2次元空間や3次元空間に配置する場合でも、サイドローブレベルが最小に近いアンテナ配置を効率よく算出することができるようにする。
【解決手段】アンテナ配置保持部3に記録されている評価値が最も良いアンテナ配置を選択し、そのアンテナ配置が示す位置に配置される複数のアンテナの中で、任意のグループに属しているアンテナを選択するアンテナ選択部6や、アンテナ選択部6により選択されたアンテナの位置を変化させて新たなアンテナ配置を生成し、そのアンテナ配置をアンテナ配置保持部3に記録するアンテナ移動部7などを設ける。
(もっと読む)
高高度長時間滞空無人機とその動作方法
実施形態は、測量および/または信号収集目的の1つまたは複数の電磁気(IR/視覚/RF)センサ素子またはスイート(112、337)を有する1つまたは複数の静止位置保持可能な高高度長時間滞空(HALE)無人機(110)を含む。実施形態は、方向可変レーザー(331)を有する1つまたは複数の静止位置保持可能な高高度長時間滞空(HALE)無人機(110)を含む。実施形態はGPS中継器として構成された4つ以上の高高度長時間滞空(HALE)無人機(611〜614)のグループを含む。 (もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を同時に送信し、その反射波を受信する送受信装置11〜16と、送受信装置の受信信号から二重偏波観測を行って偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとにレーダ波のビーム幅及びパルス幅に基づく高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave[mm/h])を算出し、平均降水強度(Rave[mm/h])とレーダ反射因子(Z)とをもとに、レーダ反射因子(Z)と降水強度(R[mm/h])との間の関係式を推定し、関係式を用いて高分解能の降水強度(R[mm/h])を算出する。
(もっと読む)
レーダ装置
【課題】レーダビームの上下左右方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ2と、このレーダ2と接続されたECU3とを備えている。ECU3は、レーダ2によって検出されたデータに基づいて、自車両と同一のレーンの直線路において前方正面を走行する先行車両を抽出する。そして、ECU3は、その先行車両について自車両に対する先行車両の距離及び上下左右方向がレーダ2によって所定回数検出された場合に、その所定回数検出されたデータに基づいてレーダビームの上下左右方向の角度ずれ量Δθx,Δθy(軸ずれ量)を算出する。
(もっと読む)
車載用レーダの動作制御装置およびその制御方法
【目的】車両の現在位置がレーダが誤動作する可能性がある領域および施設内に存在する場合の「車載用レーダの動作制御装置およびその制御方法」を提供することにある。
【構成】誤動作する領域を保存し、車両の現在位置を検出し、該現在位置が、レーダが誤動作する領域内か判断し、該現在位置が該誤動作領域内にあると判断した場合には、レーダの機能を停止する。更に、該レーダの動作状態を表示し、該現在位置が該誤動作領域内に存在するかしないかにより該レーダの動作状態の表示を切り替える。また、該誤動作領域および施設を更新する。
(もっと読む)
レーダシステム
【課題】内部のセンサから入力される情報に加え、外部から入力される情報を統合して表示し、優れた拡張性を有するレーダシステムを提供する。
【解決手段】内部センサ3と、外部から入力される情報を受け付ける外部入力インタフェース部2と、内部センサ3および外部入力インタフェース部2から入力される情報を蓄積するコンタクトデータベース4と、コンタクトデータベース4に蓄積された情報を表示する表示端末5とを備え、コンタクトデータベース4は、内部センサ3および外部入力インタフェース部2から入力される情報に基づいた個別テーブルを蓄積する複数の個別データベース42,43と、複数の個別データベース42,43に蓄積された個別テーブルを結合して結合テーブルを生成するテーブル結合処理部41と、テーブル結合処理部41において生成された結合テーブルを蓄積する結合データベース44を備える。
(もっと読む)
検知システム
【課題】検知システムにおいて、障害物等によって検知エリア内に死角が生じる場合であっても、検知領域を広げて1つのセンサで所望する領域内における動体を検知する。
【解決手段】本システム1は、センサ付照明器具2と、センサ付照明器具2から投射される送信波を反射する反射板3とを備える。センサ付照明器具2は、光源21と、送信波の対象物からの返信波により動体を検知するセンサ22と、センサ22による検知信号に基づき光源21の点灯制御を行う制御部23とを備える。光源21は、通路41略中央の天井部分に設置され、通路41全体を照明する。センサ22は通路41突き当りの壁面41cに設置され、送信波を通路41に沿って通路42の外方壁面42aに向けて投射する。反射板3は、曲がり角に設置され、センサ22からの送信波を通路42に沿って反射する。さらに反射板3は、通路42にいる人10からの返信波をセンサ22に向かって反射する。
(もっと読む)
津波監視装置
【課題】広い範囲で早期に津波を検出することができる津波監視装置を提供する。
【解決手段】航空機2に搭載され、基地局3からの検出指令に応じて津波の検出処理を実行する装置であって、基地局3と通信する通信手段11と、通信手段11が検出指令を受信した場合に、検出処理に関してあらかじめ設定された検出対象領域、撮像用パラメータおよび検出用パラメータを設定し、通信手段11を介して検出処理の結果を基地局3に送信する検出統制手段12と、検出対象領域において、撮像用パラメータを用いてSAR画像を取得するSAR画像取得手段13と、SAR画像中の各位置における波の速度を抽出し、この波の速度と検出用パラメータとに基づいて検出処理を実行する津波検出手段14とを備えたものである。
(もっと読む)
目標追尾誘導装置及び方法
【課題】レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
(もっと読む)
フェーズドアレイアンテナ装置
【課題】フェーズドアレイアンテナ装置の回路における複雑化の解消を図ることができるフェーズドアレイアンテナ装置を提供する。
【解決手段】フェーズドアレイアンテナ装置1は、一次放射機60と、複数のパッシブ移相器パネル70と、で構成されている。一次放射機60は、制御部62と、変調器63と、送信部61と、合成器64と、レーダ処理部68と、を有している。パッシブ移相器パネル70は、アレイ状に配列された受信アンテナ素子19及び送信アンテナ素子18と、移相器ユニット10と、を有している。このフェーズドアレイアンテナ装置1は、ビームステアリングして送信される高周波信号を空間給電するだけでなく、ビームステアリングに必要な各移相ユニット毎の位相情報と、各移相器を駆動する電源電力までも空間給電によりパッシブ移相器パネル70に供給する。
(もっと読む)
レーダ装置、及び干渉防止方法
【課題】電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供すること。
【解決手段】レーダ装置10、20は、目標物に対して送信電波を送信しその反射波を受信して目標物を検出する。通信装置30は他車に搭載されたレーダ装置に関するレーダ装置情報と走行情報を受信する。通信装置30は受信したレーダ装置情報等に基づいて、自車と他車とが近接する場合等、一定の送信電波停止条件を満たすときに、レーダ装置10、20から送信電波の送信を停止させる。また、通信装置30は送信電波を停止後、自車と他車とが近接しなくなった場合等、一定の送信電波再開条件を満たすとき送信電波の送信を再開させる。
(もっと読む)
レーダ制御装置およびネットワークレーダ
【課題】 監視覆域がそれぞれ設定される複数のレーダから構成されるネットワークレーダにおいて、監視対象エリアを効率的に監視するネットワークレーダおよびこれに用いるレーダ制御装置を得る。
【解決手段】 レーダ制御装置は、目標物の想定航跡d3およびレーダ諸元d1に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能d4を算出する探知性能算出部6、探知性能d4に基づきレーダ1それぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部8、および待ち受け組み合わせ計算部8が計算した監視覆域の設定をレーダ1ごとに指示するレーダ統制部2を備えたことを特徴とする。なお、レーダ1は所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
(もっと読む)
レーダ装置
【課題】 レーダ装置、特に陸上設置の海上監視レーダ装置において、受信部の局部発振周波数をデジタル信号により遠隔地から監視、調整すること。
【解決手段】 局部発振周波数とマグネトロンの発振周波数との差のIF信号(fLO−f0)をデジタル信号化する。前記デジタル信号を、通信手段を用いて遠隔地からモニタで監視する。前記マグネトロンの発振周波数変動が前記局部発振周波数の自動制御の追従範囲内にある場合は、前記デジタル信号をD/A変換回路でアナログ電圧に変換して局部発振回路にフィードバックし、fLO−f0がfIFと同一になるように受信部の局部発振周波数を自動制御する。前記マグネトロンの発振周波数変動が前記局部発振周波数の自動制御の追従範囲を超えた場合は、通信手段を用いて局部中心周波数を遠隔地から自動制御で追従可能な範囲に設定変更する。
(もっと読む)
飛しょう体及び飛しょう体誘導システム
【課題】 地上や車両等に設置された誘導管制装置が、複数ある目標を弁別することが困難な状況であっても、複数の飛しょう体は、複数ある目標のそれぞれ異なる目標に向けて誘導される飛しょう体を得る。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
レーダーシステム駆動方法およびレーダーシステム
本発明は、少なくとも1つの第1のセンサーモジュール(110a)と少なくとも1つの別のセンサーモジュール(110b)とを有するレーダーシステム(100)、特に原動機付き車両(200)のレーダーシステムを駆動する方法に関するものである。本発明に従えば、第1のセンサーモジュール(110a)の通達範囲(A)の少なくとも一部が、別のセンサーモジュール(110b)の通達範囲(B)とオーバラップする。そして、監視モード(305)にある第1のセンサーモジュール(110a)は、別のセンサーモジュール(110b)の動作状態に関する情報を得るために、この別のセンサーモジュール(110b)から送り出される送信信号を受信する。  (もっと読む)
(もっと読む)
航空機用レーダ・システム
使用中に自機を取り囲む領域内の少なくとも1つの監視可能なゾーンにある別の航空機を少なくとも検出するための設備を、航空機に設けるためのレーダ・システムであって、このシステムは、監視可能なゾーンごとに少なくとも1つのサブシステムを備え、サブシステムは、電磁探索信号を送信するための1つの送信器と、その探索信号の反射を受信するための少なくとも1つの受信器とを備え、送信器は、その航空機に対して静止した方向に探索信号を送信するように配列される。  (もっと読む)
(もっと読む)
フェーズドアレイアンテナ及びその位相制御方法
【課題】 各アンテナ素子から出力される信号の移相量を調整することにより、各パネルから放射される信号の位相面をアンテナパネル全体として揃え、高効率な電力伝送を行うことのできるフェーズドアレイアンテナ及びその位相制御方法を提供することを目的とする。
【解決手段】 パイロット信号の到来方向とアンテナパネルとがなす到来方向角度に基づいて、パイロット信号の到来方向に直交するアンテナ基準線と各アンテナ素子との間の距離を算出し、算出されたそれぞれの距離に応じて、各アンテナ素子から放射させるマイクロ波の移相量を決定する。
(もっと読む)
ネットワークレーダシステム
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
1 - 20 / 21
[ Back to top ]