
Fターム[5J070AB21]の内容
レーダ方式及びその細部 (42,132) | 送信信号 (3,620) | 変調特性の変更 (78)
Fターム[5J070AB21]に分類される特許
61 - 78 / 78
防犯センサ
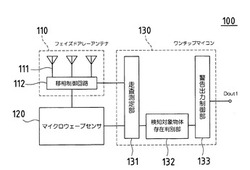
【課題】誤報が発生することを極力回避するとともに、特定方向の検知を禁止したり方向によって検知感度を変更可能とすることで動作の信頼性を高めることが可能な防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体によって反射された前記マイクロ波を受信して、その受信強度に応じた反射波受信強度信号を出力するマイクロウエーブセンサ120と、方向可変アンテナ装置110と、この方向可変アンテナ装置110に対して送受信方向の走査を指示して反射波受信強度信号の出力との関係を求める走査測定手段131と、求められた関係に基づいて検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段132と、検知対象物体が存在していると判別された場合に警告信号を出力する警告信号出力制御手段133とを備える。
(もっと読む)
レーダ装置

【課題】様々な走行状況において障害物を効果的に検出する。
【解決手段】発振器10は、FM−CWモードとCWモードの両方で発振信号を出力し、スイッチ14は広角送信アンテナ16a、狭角送信アンテナ16bを切り換えて電波を送信する。送信波は障害物に当たって反射され、受信アンテナで受信される。受信アンテナ20で得られる受信信号をミキサ22で送信波と混合し、得られた差信号をフィルタ24でフィルタリングしてビート信号を得る。ビート信号に基づき、信号処理回路26が障害物の距離、速度を検出する。そして、制御回路30は、2種類のモード、2種類の送信アンテナ16a、16bを適応的に切り換えて、各種状況で効果的な障害物の検出を行う。
(もっと読む)
レーダ装置
【課題】 他者との混信を抑制し、低コスト化を図ることができるレーザ装置を提供すること。
【解決手段】 計測用信号を所定のPN符号に基づいた発信条件にて発信制御する発信制御手段1,2と、計測用信号を発信する出力手段1dと、を備えたレーダ装置であって、計測用信号の発信条件をランダムに設定する発信条件設定手段3を備えた。
(もっと読む)
電波レーダ装置及び車間距離制御装置
【課題】2周波CW方式を用いた電波レーダにおいて、相対速度0状態においても、前方車の距離検知を可能とし、安定したACC追従走行を実現する。
【解決手段】2周波CW方式と他の変調方式(周波数パルスCW方式、もしくはFM−CW方式)を組み合わせることで、相対速度がある時は、2周波CW方式、相対速度0付近の状態では周波数パルス方式を混在させて、相対速度0でも前方車の反射波から得られるIF信号を発生させて、ACC対象車両の存在を検知し、安定したACC追従走行を可能とする。
(もっと読む)
レーダー装置
船用レーダー装置は、同じ振幅だが異なる幅の3つのパルス群A、B、Cを伝播し、短パルスは、近距離にある対象物の検出を可能にし、長パルスは、長距離にある対象物の検出を可能にする。パルスは異なって符号化され、短パルスAは連続波信号であり、長パルスは周波数変調されたチャープ信号を有し、一方のパルスCは上昇し他方のパルスBは下降する。レーダーの出力は、約190Wしか必要としない。  (もっと読む)
(もっと読む)
防犯センサ
【課題】 風による草木などの揺れや接近する昆虫などの影響によって内蔵するマイクロウエーブセンサが影響を受けて誤報が発生することを極力回避し、動作の信頼性を高めることが可能な防犯センサを提供する。
【解決手段】 検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、それぞれの反射波に基づいてこの検知エリア内の検知対象物体の有無を示す反射波検知信号S1を出力するとともに、その検知対象物体までの距離情報Vdを出力するマイクロウエーブセンサ1と、距離情報Vdに基づいてその検知対象物体までの距離が所定距離以上か否かを判定する距離判定手段102と、その検知対象物体までの距離が前記所定距離以上で、かつ、反射波検知信号S1が検知対象物体の存在を示しているときのみ警告信号Dout1を出力するように制御する警告信号出力制御手段104とを備える。
(もっと読む)
レーダ装置
【課題】 相対速度に依存せずに安定して距離計測を行う。
【解決手段】 目標物に対する相対速度及び距離を計測するレーダ装置であって、前記相対速度が大きい場合に適した方法で相対速度及び距離を計測する第1の計測手段と、前記相対速度が小さい場合に適した方法で相対速度及び距離を計測する第2の計測手段と、前記第1の計測手段と第2の計測手段とを相対速度の大きさに基づいて切り替える制御手段とを備え、該制御手段は、所定の閾値と相対速度とを比較し、相対速度が閾値より大きければ前記第1の計測手段を選択し、相対速度が閾値以下であれば第2の計測手段を選択する、という手段を採用する。
(もっと読む)
複数の物体の距離及び相対速度の測定のための方法及び装置
時間的に線形の周波数ランプをもつ送信信号を発射し、物体で反射した受信信号を受信して送信信号と混合することによる、FMCWレーダを用いた複数の物体の距離及び相対速度の測定のための方法及び装置。各物体についての各周波数ランプのミキサ出力周波数に対して、距離値と相対速度値との組合せが割り当てられ、距離と相対速度との複数の組合せの交点から、考えられる物体の距離及び相対速度が決定され、その際、考えられる物体は、アンビギュイティのための見せかけの物体、又は現実の物体でありうる。アンビギュイティによる見せかけの物体は、その次の測定サイクルにおいて少なくとも1つの周波数ランプの周波数勾配をランダムに変化させることによって、消去される。 (もっと読む)
無線センシング装置及び無線センシング方法
【課題】 車載レーダ等の各種センシング装置において、コストの上昇及び消費電力の増大を低く抑えながらも距離精度を高めることができると共にセンシング距離を長くすることができるようにする。
【解決手段】 無線周波数帯の信号を発振する発振器101を間欠的且つ発振動作期間を変えて発振動作させ、発振動作期間の信号を送信アンテナ503より空中へ放射すると共に、空中へ放射した送信波が被測定物1000を反射して戻ってくる反射波を受信アンテナ504にて受信し、受信した反射後と先に送信した送信波とに基づいて被測定物1000に対する距離を求める。これにより、送信ピーク電力を高くすることなく近距離における高い距離分解能の無線センシングと遠距離の無線センシングの性能を実現することが可能となる。
(もっと読む)
2周波CWレーダ
【課題】2周波CWレーダと回転支持機構との結合態様を工夫して、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現する。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
(もっと読む)
アンビギティー検知式周波数偏位変調
距離範囲検知装置は、マイクロ波信号を送信するようになされた送信機(4)、及び目標から反射した、送信信号の一部に対応するエコー信号を受信する受信機(4)と、前記送信信号を発生するために前記送信機(4)に供給される駆動信号を発生する信号発生手段(2)であって、信号発生手段の発生する駆動信号には、少なくとも2つの周波数を含む第1の信号フレーム(300a)と少なくとも2つの周波数を含む第2の信号フレーム(301a)が含まれており、前記第2の信号フレーム(301a)は前記第1の信号フレーム(300a)と異なる信号発生手段(2)と、前記送信信号と共に前記エコー信号を処理して前記エコー信号を発生した目標までの距離を決定するプロセッサ(11)を備える。本装置は、自動車の、代表的には車間距離制御(ACC)機能における周波数偏位変調(FSK)レーダーに特に適している。本装置は距離測定のアンビギティーを低減可能である。アンビギティーを低減する対応方法も開示される。 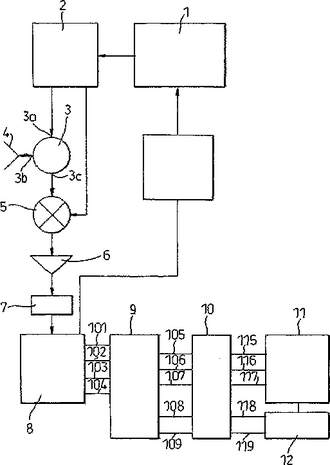 (もっと読む)
(もっと読む)
レーダ装置、レーダ装置の制御方法
【課題】 一台で低コストにて、遠距離から近距離までの広い範囲のターゲットの検知が可能なレーダ装置を提供する。
【解決手段】 制御演算部11から入力されるFM用波形信号11bにて周波数変調を行って送信高周波信号13aを出力する送信高周波FM変調発信器13と、送信高周波信号13aを矩形波信号11aで制御される短パルス発生回路12から出力される制御パルス12aにてON/OFFすることで振幅変調する送信高周波ASKスイッチ回路14を含む送信部と、受信高周波信号の入力のON/OFFを矩形波信号11aに同期し、遅延時間が順次スライドする様に制御されたゲーティングパルス19aにて制御する受信高周波ゲート回路17を含む受信部を備え、FM用波形信号11bで周波数変調した送信高周波信号13aを用いるFM−CWレーダモードと、制御パルス12aで振幅変調した送信高周波を用いるパルスレーダモードとを切り換えて動作させる。
(もっと読む)
車載電波パルスレーダ装置
【課題】RF送受信回路の異常状態を安価で且つ小型な回路を用いて高い信頼性で検出可能な車載電波パルスレーダ装置を得る。
【解決手段】送受信信号W1、W2に基づいて被検出物体7までの距離dを算出する信号処理装置14Aは、送信信号W1の周波数可変手段17と、RF送受信回路15Aの異常判定手段とを含み、周波数可変手段17は、送信信号W1の周波数を所定範囲内で変化させて、RF送受信回路15A内の漏れ波の位相状態を強制的に変化させ、異常判定手段は、通常時の受信信号に基づいて学習された正常レベル変動幅と、漏れ波の位相状態が変化したときにIF受信信号のDC成分として観測される漏れ込みレベル変動幅とを比較し、正常レベル変動幅と漏れ込みレベル変動幅との差分に基づいて、RF送受信回路15Aの異常信号Eを生成し、車両の制御システムに対して異常通知を行う。
(もっと読む)
レーダ装置
【課題】目標の移動速度によらず高い測角精度を得られるレーダ装置を提供すること。
【解決手段】予測フィルタにより算出された1の予測点の近傍に複数の予測点を追加設定し、各予測点ごとに個別に合成開口処理を実施する。そして、これにより算出されたアンテナパターンを用いて受信利得の最も高い予測点を選択し、この予測点につき合成開口されたデータを用いて測角処理を実行するようにする。これによりただ一つの予測点でなく、複数の予測点を合成開口ポイントの候補として用いることができ、これらから最も信憑性の高いポイントのデータを用いて測角処理を実施できるようになる。従って予測フィルタにより算出された予測位置が現実とずれた場合でも、測角精度を高精度に保つことが可能となり、ひいては、目標の移動速度によらず高い測角精度を得られるレーダ装置を提供することが可能になる。
(もっと読む)
測定信号の材料透過式位置検出を行うための方法および装置
本発明は、測定信号の材料透過式位置検出方法に関し、とりわけ、側壁、蓋および底において材料透過式位置決定方法に関する。本発明では、高周波送信器(20,120)が測定信号(22,122)をギガヘルツ周波数領域で送信し、該測定信号(22,122)は材料(10)を少なくとも1回は透過し、該測定信号(22,122)を高周波受信器(24,124)によって検出することにより、透過位置(18)を検出する。さらに本発明は、本発明による方法を実施するための装置にも関する。  (もっと読む)
(もっと読む)
物体を評価するためのレーダーセンサ、および方法
【課題】
【解決手段】周波数変調した送信信号を送信してセンサ検知範囲内の物体に反射した部分波を受信し、その際、各周波数ランプのいずれの反射させた物体についても送信信号に対する受信信号の周波数偏移が決定され、複数のランプの周波数偏移の組合せから、その検知された物体の相対速度および距離が決定可能である方法およびレーダーセンサが提案され、この場合、前の測定サイクルで検知された該物体がメモリに記憶され、その相対速度およびその距離が将来の測定サイクルのために予測され、予想される周波数偏移が決定され、かつ複数のランプの周波数偏移の組合せが、まだメモリに記憶されていない物体についての相対速度および距離の決定のために実施される。
(もっと読む)
高周波測定装置への妨害信号の影響を低減する方法、および、高周波測定装置
本発明は、高周波測定装置への妨害信号の影響を低減する方法、とりわけ、高周波測定装置の受信装置により検出されたアナログ測定信号(22)を該アナログ測定信号(22)のための評価ユニットの少なくとも1つのアナログディジタル変換器(28)に供給するようにした高周波測位装置を動作させるための方法に関する。
本発明によれば、前記少なくとも1つのアナログディジタル変換器(28)のサンプリングレートは妨害信号と相関する妨害信号測定値に応じて変化させられる。 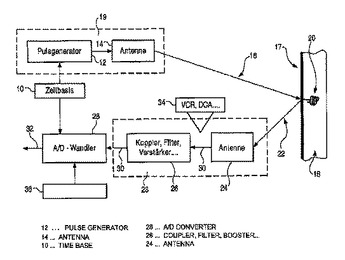 (もっと読む)
(もっと読む)
非接触リーダライタ
本発明の目的は、異なる周波数の搬送波を用いた複数の送信信号を送信する送信部と、前記送信部により送信した複数の送信信号に対する返信である複数の返信信号を受信する受信部と、前記返信信号に基づく返信信号の位相データを算出する位相算出部と、前記位相算出部からの位相データに基づいて前記返信信号を返信した物体との距離を算出する距離算出部および/または前記受信信号から得られたベースバンド信号に基づいて、前記ベースバンド信号の周波数成分を算出し、前記周波数成分に基づいて前記返信信号を返信した物体の速度を算出する速度算出部と、前記送信部から送信する送信信号の送信方向を制御する制御部とを備えた非接触リーダライタを提供することである。 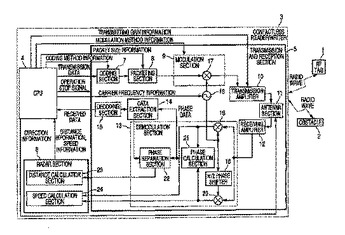 (もっと読む)
(もっと読む)
61 - 78 / 78
[ Back to top ]