
Fターム[5J070AD01]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナ単一 (1,358)
Fターム[5J070AD01]の下位に属するFターム
送受別体 (672)
Fターム[5J070AD01]に分類される特許
21 - 40 / 686
検出装置及び検出方法
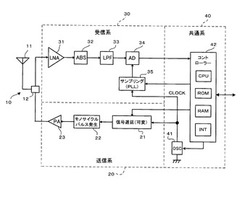
【課題】本発明は従来よりも設計の自由度を向上させた等価時間サンプリング方式の検出装置を提供する。
【解決手段】送信手段(20)は、各送信パルスが所定の送信パルス繰り返し周期内に配置されるパルス列信号であって、各送信パルスの位相を当該送信パルス繰り返し周期内において段階的にシフトした送信パルス列信号を検出波として送出する。受信手段(30)は、反射波を受信して受信パルス列信号を形成し、受信パルス列信号をサンプリングして複数の受信パルスの波形データを出力する。信号処理手段(40)は、複数の受信パルスの各波形データの時間軸を各送信パルスの位相の段階的シフトに対応して調整し、各波形データを合成して一つの受信パルスの波形データを形成する。
(もっと読む)
マイクロ波エレメントへの物体の近接を検出するために使用されるセンサアセンブリ

【課題】マイクロ波エレメントへの物体の近接を検出するために使用されるセンサアセンブリを提供する。
【解決手段】少なくとも1つのマイクロ波信号を発生するように構成された信号発生器104と、信号発生器104に接続された結合器106と、結合器106に結合されたマイクロ波エレメント108と、結合器106に接続された処理モジュール112が含まれている。マイクロ波エレメント108は、少なくとも1つのマイクロ波信号の関数として電磁界を発生するように構成されている。マイクロ波エレメント108は、物体102が電磁界と相互作用すると、装荷信号を結合器106へ反射するように構造化されている。処理モジュール112は、基準信号を使用して装荷信号を処理し、マイクロ波エレメント108への物体の近接を表すデータ信号を生成するように構成されている。データ信号はサブ−マイクロ波周波数を画定する。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
二次監視レーダ
【課題】航空機の監視に加え、気象情報を容易に収集する。
【解決手段】モードS二次監視レーダは、航空機に質問信号を送信し、当該質問信号に応答して航空機から送信された応答信号を受信して航空機の飛行を監視する二次監視レーダであって、送信手段と、受信手段と、気象情報取得手段と、位置特定手段と、出力手段とを有する。送信手段は、ロールコール期間にGICBレジスタの気象情報の送信要求を含む質問信号を送信する。受信手段は、航空機から質問信号に応じて送信された応答信号を受信する。気象情報取得手段は、前記受信手段が受信した応答信号から、GICBレジスタの気象情報を取得する。位置特定手段は、前記受信信号が受信した応答信号から、航空機の位置情報を特定する。出力手段は、前記気象情報取得手段で取得された気象情報を、前記位置特定手段で算出された位置情報と関連づけて出力する。
(もっと読む)
画像レーダ装置
【課題】目標とレーダの間の相対運動が未知である等の場合でも、回転運動によって発生する画像のぼけを精度よく補償することができるとともに、クロスレンジスケーリングを実施できるようにする。
【解決手段】レンジヒストリ取得回路1により取得されたレンジヒストリで、不要な並進運動によって発生するレーダと目標間の不要な距離変化を補償する並進運動補償回路2や、並進運動補償回路2により距離変化が補償されたレンジヒストリで、目標における高周波信号の各反射点で、回転運動によって発生するレンジ方向のぼけを補償する回転レンジセル移動補償回路3などを設ける。
(もっと読む)
レーダ装置
【課題】目標の検出性能と測距性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】距離−ビート周波数マップに対してCFAR処理を実施することで目標候補を検出する目標候補検出処理部13と、目標候補検出処理部13により検出された異なる時刻の目標候補のPRI内の距離とビート周波数から目標相対速度を算出する目標相対速度算出処理部14とを設け、目標相対距離算出処理部15が、目標候補検出処理部13により検出された目標候補のPRI内の距離及びビート周波数と目標相対速度算出処理部14により算出された目標相対速度から目標相対距離を算出する。
(もっと読む)
立体映像対応型ICカード処理装置
【課題】選択対象物を立体映像で表示する表示区画部を有し、ICカードのタッチ行為位置とリーダ・ライタの読書き可能位置とを一致させ、読込み・書込みを行えるようにする。
【解決手段】この装置は、立体映像で表示する表示区画部21A、非接触ICカード25が表示区画部の正面位置にかざされたときに非接触ICカードの第1の位置情報(X,Y)を検出するためアンテナ22、非接触ICカードとの間で読書きを行うリーダ・ライタ23、表示区画部の位置の情報、選択対象物に係る立体映像の表示位置の情報を記憶する記憶部24、表示区画部に対してタッチ行為がなされた非接触ICカードの表示区画部からの第2の位置情報(Z)を検出する距離画像検出装置20B、第1と第2の位置情報(X,Y,Z)が記憶された立体映像の表示位置と一致したとき選択対象物を確定しリーダ・ライタで非接触ICカードの情報の読書きを行う処理装置20Cを備える。
(もっと読む)
レーダ装置
【課題】距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【解決手段】Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正する。
(もっと読む)
移動体の速度計測装置
【課題】移動体の移動速度を検出できる範囲を大きく確保でき、かつ、打撃前後の移動体の移動速度、移動体を打撃する物体の速度を同時に計測する。
【解決手段】ドップラーセンサ14を用いて打撃領域の前方から打撃領域に向かって移動するボール2と、打撃領域でボール2を打撃するバット4と、打撃されたあとのボール2とに向けて送信波W1を送信し、バット4とボール2とで反射された反射波W2を受信してドップラー信号Sdを検出する。ドップラー信号Sdから変換された中間データは蓄積部30に時間経過に従って順番に予め定められた蓄積期間分蓄積される。計測部18は、蓄積部30に蓄積された中間データに基づいて打撃時点を特定し、ボール2がアンテナ12に接近する方向に移動する接近速度、ボール2がアンテナ12から離間する方向に移動する離間速度、バット4の速度である物体速度を算出する。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
レンジサイドローブ除去装置、信号処理装置、同信号処理装置を備えたレーダ装置、レンジサイドローブ除去方法及びプログラム
【課題】レンジサイドローブによる偽像を低減し、物標を確実に検出する。
【解決手段】レーダ装置1において、レンジサイドローブ除去装置36は、レーダーアンテナ10からの受信信号を取得し、パルス圧縮処理を行ってパルス圧縮信号を生成するパルス圧縮部33と、受信信号から、パルス圧縮信号のレンジサイドローブの擬似信号を生成する擬似レンジサイドローブ生成部34と、パルス圧縮信号から擬似信号に相当する成分を除去する信号除去部35と、を備える。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 ドップラフィルタ処理後のデータをスキャン間で正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部及び積分処理部を具備する。無線部は、外部からパルス信号を受信し、パルス信号を、パルス圧縮係数を生成するサンプリング周波数よりも大きいサンプリング周波数でオーバーサンプリングしてデジタル変換する。パルス圧縮部は、デジタル変換でのオーバーサンプリングによりサンプル数が増加したデジタルデータに対して、パルス圧縮係数を用いてパルス圧縮処理を施し、パルス信号毎のレンジセル信号を生成する。ドップラフィルタ処理部は、レンジセル信号に対してドップラフィルタ処理を施すことで、レンジセル毎の周波数バンク信号を生成する。積分処理部は、周波数バンク信号をスキャン間でレンジセル毎に積分する。
(もっと読む)
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
(もっと読む)
自動水栓装置
【課題】電波センサを用いた自動水栓装置であって、簡単な構成により、確実に吐水から止水への切り替えが可能であり、止水遅れのない自動水栓装置を提供する。
【解決手段】電波センサ40を備えた自動水栓装置1において、止水閾値Ttは、整流状態の検出信号よりも大きく、且つ、手が洗浄水の水流中に差し入れられた状態の検出信号よりも小さく、指向性決定手段は、止水中において吐水方向Aに沿って第1検知範囲a1を形成し、且つ、吐水中において、洗浄水の水流Wと干渉させ電波を洗浄水の水流Wによって減衰又は反射させ、これにより、吐水中は吐水方向Aにおいて短い第2検知範囲a2を形成し、吐水中に吐水口26付近に差し入れられた低い電波反射率の検知物体を検知する場合の検出信号が止水閾値Ttを超えるように、第2検知範囲を形成する。
(もっと読む)
自動水栓装置
【課題】電波の導波経路からの電波の漏れを無くして、誤検知を発生しない自動水栓装置を提供する。
【解決手段】吐水口、及び取付面に設置するための取付部、を有するスパウト本体と、スパウト本体内に隣接して配置された通水路及び導波路と、導波路を通して電波を送受信する電波センサであって、取付部に対して吐水口とは反対側にスパウト本体から露出した状態で導波路の端部に取り付けられており、導波路の端部に取り付けられた状態で取付面のスパウト取付孔を通過可能に構成された電波センサと、が一体的に組合わされたスパウトユニットと、電波センサの検知信号に基づいて、通水路に接続された電磁弁を駆動して吐水口からの洗浄水の吐水及び止水を実行する制御部と、を有する自動水栓装置。
(もっと読む)
自動水栓装置
【課題】電波の導波経路からの電波の漏れを無くして、誤検知を発生しない自動水栓装置を提供する。
【解決手段】吐水口、及び取付面に設置するための取付部、を有するスパウト本体と、スパウト本体内に隣接して配置された通水路及び導波路と、導波路を通して電波を送受信する電波センサであって、取付部に対して吐水口とは反対側にスパウト本体から露出した状態で導波路の端部に取り付けられており、導波路の端部に取り付けられた状態で取付面のスパウト取付孔を通過可能に構成された電波センサと、が一体的に組合わされたスパウトユニットと、電波センサの検知信号に基づいて、通水路に接続された電磁弁を駆動して吐水口からの洗浄水の吐水及び止水を実行する制御部と、を有する自動水栓装置において、導波路と通水管との間に、導波路の振動を吸収する弾性部材が設けられている。
(もっと読む)
レーダ装置用送信モジュール
【課題】最大探知距離を劣化させることなく、小型化、質量の低減が可能とし、かつ電源効率を向上させる。
【解決手段】レーダ装置用送信モジュール11は、出力電圧が経時的に変動する電圧源12と、電圧源12から出力される出力電圧を検出する電圧モニタ回路19と、電圧モニタ回路19によって検出された出力電圧に基づいてデューティー比が制御された第1の制御パルス列Pc1を出力するパルス発生器16と、第1の制御パルス列Pc1のデューティー比に応じた第2の制御パルス列Pc2を出力する半導体スイッチ13と、搬送波を出力する搬送波発生器14と、第2の制御パルス列Pc2に含まれる制御パルスが入力されたときに、搬送波を増幅して送信信号を形成する電力増幅器15とを具備し、電圧モニタ回路19は、電圧源12の出力電圧の変動による送信信号の平均電力の変動を抑制するように、第1の制御パルス列Pc1のデューティー比を制御する。
(もっと読む)
レーダ装置
【課題】小型、低コストで、簡易な構成の近距離の探知に適したレーダ装置を提供する。
【解決手段】発振器2から出力されるマイクロ波帯以上の周波数の連続波をパルス状に減衰させて送信波とし、これを送受信アンテナ9から対象物に放射する。対象物により反射された反射波を送受信アンテナ9で受信した後、受信した反射波を送信波で検波することで、対象物までの測距情報を得る。
(もっと読む)
方位測定装置
【課題】電磁波を目標物に照射し、目標物によって反射された電磁波を受信して目標物の方向を測定する方向測定装置において、構成を簡素にすること。
【解決手段】発振器10はパルス波である信号を生成し、送信アンテナ11は漏れ波アンテナである。この漏れ波アンテナは周波数によりビーム方向が変化する。パルス波は周波数的に広がりを持っているため、信号の放射方向も周波数により異なることとなる。その結果、目標物によって反射されて受信アンテナ12により受信された信号は、目標物の方位によって異なる周波数スペクトルを有する。受信した信号をBPF14A〜Cにそれぞれ透過させて信号強度を測定することで、目標物が3方向のいずれの方位にあるかを検知することができる。
(もっと読む)
目標類別装置及び目標類別方法
【課題】 距離の異なる複数の目標を観測する場合、距離によって観測点間での目標に対する入射角の変化が異なるため、入射角の変化が大きくなりすぎるとクラッタ信号だけでなく目標信号の強度も低下してしまうという。
【解決手段】 目標までの距離に応じて目標レンジの切出し処理に利用する観測領域を設定する処理領域設定部を備え、観測領域内で取得した観測信号をデータベースから抽出し、抽出した観測信号を用いて目標の類別処理を行うようにした。処理領域設定部は、目標と観測信号を取得した自己位置のなす角度に基づき、観測領域を設定するようにした。
(もっと読む)
21 - 40 / 686
[ Back to top ]