
Fターム[5J070AE09]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 人 (687)
Fターム[5J070AE09]に分類される特許
481 - 500 / 687
タイヤ空気圧監視システムおよびキーレスエントリシステム搭載車両および送信ユニット位置検出方法
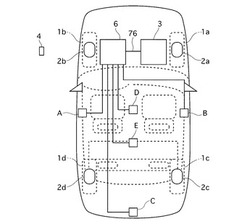
【課題】 コストの増大を抑制しつつ、各タイヤに設けられた送信ユニットの位置を特定することが可能な装置を提供すること。
【解決手段】 タイヤ空気圧監視システムとキーレスエントリシステムを搭載した車両において、タイヤ空気圧監視システムの送信ユニット2がタイヤ空気圧情報を送信したときに、キーレスエントリシステムの携帯ユニット4の位置を検出するようにした。
(もっと読む)
測位用信号受信装置

【課題】安価な移動体検出機能を備えた測位用信号受信装置を提供する。
【解決手段】測位用信号受信装置10において、測位用アンテナ12は、測位用衛星からの測位用信号を受信する。局部発振器26は、局部発振信号を生成する。検出用アンテナ34は、局部発振信号を放射するとともに、放射された局部発振信号の反射信号を受信する。ミキサ回路16は、入力された信号と局部発振信号とを混合することにより中間周波信号を生成する。測位用アンテナ電源制御部44、スイッチ制御部46は、ミキサ回路16へ入力される信号を、測位用信号と反射信号とで切り替える。位置算出部48は、ミキサ回路16に測位用信号が入力されたときに出力される中間周波信号に基づいて、測位用信号受信装置10の位置を求める。移動体検出部50は、ミキサ回路16に反射信号が入力されたときに出力される中間周波信号に基づいて、測位用信号受信装置10付近の移動体を検出する。
(もっと読む)
移動物体検知装置
【課題】ドップラ信号を利用する移動物体検出装置において、センサ直近を落下する雨滴等のノイズ源によって移動物体の検知性能に大きな影響を与える。
【解決手段】三つの異なる周波数の電波を送受信して得られるドップラ信号間で二つのドップラ差信号を求める。得られたドップラ差信号間の位相差から移動物体に基づくドップラ周波数を抽出し、得られたドップラ周波数における振幅値と位相差から距離値を求める。得られた距離値と振幅値に基づき、移動物体の検出を行う。
(もっと読む)
建設現場における移動体の位置特定システム及び方法
【課題】建設現場において移動体に取り付けられたICタグの位置を精度良く特定することができるようにする。
【解決手段】固有のタグIDが記憶された複数のICタグ21が、建設現場1の固定位置に配置されるとともに、ICタグ22が移動体にも取り付けられる。リーダ装置30は、移動タグ(22)からタグIDを読み取るとともに、固定タグ(21)からタグIDを読み取り、読み取ったタグIDを管理装置10に送信する。管理装置10は、リーダ装置からタグIDを受信し、受信したタグIDのうち、固定タグであるタグIDに対応する位置情報を固定タグ情報データベース152から読み出し、読み出した位置情報に基づいて、建設現場1において移動タグが位置しうる領域を特定する。
(もっと読む)
物体判定装置、方法及びプログラム
【課題】前処理を行うことなく、移動物体であるか静止物体であるか判定する。
【解決手段】物体判定装置は、物体までの距離を測定して距離データを生成する距離測定装置1と、距離データから位置データを生成する処理を行う距離データ処理部2と、位置データを記憶する位置データ記憶部3と、位置データの集合である位置データ集合を抽出する位置データ集合抽出部4と、位置データ集合の領域面積に基づいて物体が移動物体であるか静止物体であるかを判定する移動物体判定部5と、を備えている。
(もっと読む)
物体検出方法および物体検出装置
【課題】物体の検出精度の向上を図ることができ、しかも、車両以外の物体も検出できる物体検出装置を提供する
【解決手段】カメラ1およびレーダ2から得られた情報に基づいて物体を検出するコントロールユニットCUを備えた物体検出装置であって、コントロールユニットCUが、画像上の物体を示す領域である注目領域内の大きさ変化を求めるとともに、検波情報から得られた計測点上の物体との距離変化を求める変化算出処理と、大きさ変化と距離変化とを照合し、両者の相関性が得られた場合に物体検出と判定する物体検出処理と、前記相関性が得られた注目領域内の画像情報と、前記計測点の検波情報との少なくとも一方に基づいて物体の種類を判定する種類判定処理と、を実行する。
(もっと読む)
移動体の移動方向判別プログラム及び装置。
【課題】RFIDタグを備えた移動体の移動方向を、単数のアンテナで、かつ自動で検知するための装置を提供する。
【解決手段】移動体が携帯しているアクティブ型RFIDタグからの電波を受信して、移動体の移動方向を判別する受信装置であって、移動体の移動する経路の途中に配置され、アクティブ型RFIDタグから送信される電波を受信するアンテナと、移動体の移動方向におけるアンテナの一方側に設けられ、アンテナの一方側と他方側とでアンテナの受信レベルに差異を生じさせる電波減衰シールドと、アクティブ型RFIDタグから送信されてアンテナで受信された電波の受信レベルを一定の時間間隔で検出する受信レベル検出手段と、受信レベル検出手段で検出される受信レベルの時間的推移に基づいて移動体の移動方向を判別する判別手段と、を備える。
(もっと読む)
ミリ波画像処理装置及びミリ波画像処理方法
【課題】 近傍界におけるアンテナ面上での球面波を考慮してマッチトフィルタ処理により画像化を行うことができるミリ波画像処理装置を提供する。
【解決手段】 ターゲットが放射する電波を受信するT字型アンテナ2と、前記T字型アンテナ2が受信した信号をA/D変換するA/D変換部9と、前記A/D変換されたデータのうち、横系の変換出力と縦系の変換出力の信号の組み合わせで相関処理を行う相関処理部11と、視野内の画素ごとにターゲットが焦点とする距離にあると想定して理論的に受信信号を生成した参照関数と前記T型アンテナが受信した球面波の受信信号との相関を取ってターゲットを画像化する画像化処理部15を有している。
(もっと読む)
物体検出方法および物体検出装置
【課題】複数種類の物体の検出が可能であり、かつ、検出精度の向上をはかることができる物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2とから得られる情報に基づいて物体を検出するコントロールユニットCUが、入力した情報に対して物体検出用の所定の変換を行う情報変換処理と、入力情報と変換情報との少なくとも一方の情報に対し、検出対象となる物体との相関性に対応して重み付けを行う重み付け処理と、この重み付けした後の情報に基づいて物体の検出を行う検出処理と、を実行するようにした。
(もっと読む)
物標識別装置、プログラム
【課題】 少ない処理量にて物標が人間であるか否かを識別できるようにすることを目的とする。
【解決手段】前サイクルでの認識物標と、画像処理部からの物標情報とを対応づけ、その対応付けた属性に基づいてしきい値を設定し、その設定したしきい値を用いて、ビート信号の周波数解析結果から周波数ピークを抽出する(S31〜S37)。上り区間のピークと下り区間のピークとで、同一物標に基づくピーク周波数成分を組み合わせてなるピークペアを設定すると共に、そのピークペアに基づいて物標を認識し(S38〜S40)、認識した各物標毎に、その物標を表すピークペアの正規化平均パワー値NP、及びピークペア間のパワー値の差の時間的なばらつきを表す標準偏差DPに基づき、対象物標の属性値を、「車両」「非車両:人間」「非車両:その他」のいずれかに設定する(S41)。
【選択図】 図4  (もっと読む)
(もっと読む)
小便器洗浄装置及び小便器洗浄システム並びに給水装置
【課題】マイクロ波ドップラセンサを用いた小便器洗浄装置が複数隣接して設置された場合に、小便器洗浄装置同士の影響を低減すること。
【解決手段】ドップラ信号に基づいて人体検出又は尿流検出を行い、ボール部内に洗浄水を供給する小便器洗浄装置において、ドップラ信号に基づいて人体検出又は尿流検出を判断するために必要な期間を複数に分割しそれぞれの期間を第1期間とし、この第1期間内に第1期間の始まり時点から所定時間遅延させる第2期間を設け、この第2期間経過後にマイクロ波ドップラセンサを所定サンプリング周期でn回(nは2以上の整数)間欠動作させ、しかも、第2期間を第1期間毎にランダムに変更するようにした。
(もっと読む)
測位装置
【課題】 センサの配置やセンサ自体の移動などに対応してセンサ間の同期をとるためのケーブル接続を不要とし、また、時計誤差を補正するための送信局を不要とするために、測位装置内の処理でセンサ間の時計誤差の補正を可能にする。
【解決手段】 目標から放射もしくは反射された電波を複数のセンサで受信し、受信した電波の到来時間差に基づいて目標の位置を算出する測位装置において、各センサで複数回受信された電波の到来時間差を算出する到来時間差算出部と、各センサ間の電波の到来時間差を基に、センサ間の時計誤差と電波を受信した各時刻における目標位置を測位する測位部を備える。
(もっと読む)
小便器洗浄システム
【課題】複数のドップラーセンサから発信される電波同士が干渉して、自動洗浄機能が誤作動することを防止した小便器洗浄システムを提供する。
【解決手段】ドップラーセンサにより人体や尿を検知して使用後の便器を自動洗浄する自動洗浄機能を備えた複数の小便器を併設してなる小便器洗浄システムにおいて、複数の小便器のうちの一つに設けられた制御手段は、各小便器に設けた各ドップラーセンサを、その動作期間が互いに重複しないように間欠動作させるべく、他の小便器の制御手段へ、通信手段を介してドップラーセンサの動作タイミングを指定する動作タイミング情報を送信する主制御機能を実行し、この動作タイミング情報を受信した各制御手段は、動作タイミング情報に基づいて、各ドップラーセンサをそれぞれ間欠動作させる従制御機能を実行することにした。
(もっと読む)
小便器洗浄装置及び小便器洗浄システム
【課題】マイクロ波ドップラセンサの動作をランダム周期で間欠的に行う場合においても、蛍光灯などからのノイズによる誤動作を抑制することができる小便器洗浄装置を提供すること。
【解決手段】ボール部に向けて電波を送信し、その反射波を受信してドップラ信号を生成するマイクロ波ドップラセンサを有し、ドップラ信号に基づいてボール部内に洗浄水を供給する小便器洗浄装置において、ランダムな不等間隔サンプリング周期でマイクロ波ドップラセンサを間欠動作させるセンサ制御手段と、サンプリング周期で出力されるドップラ信号を順次A/D変換してドップラ信号データを生成するA/D変換手段と、ドップラ信号データを所定の等間隔サンプリング周期のデータへ補間する周期補間手段と、補間した前記等間隔サンプリング周期のデータに含まれるノイズを除去するデジタルフィルタとを備えた。
(もっと読む)
アクテイブタグ装置
【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。特定エリアの内部や周辺部に沿って複数の発信手段1又は受信手段2あるいは発信手段1又は受信手段2に接続された複数のアンテナ又は複数の送受波器が設置され、あるいは発信手段1のアンテナ又は送受波器が複数の放射素子を有する漏洩ケーブルであり、漏洩ケーブルが特定エリアに沿って設置され、又は特定エリアを囲い又は区分するように設置される。
(もっと読む)
レーダ装置
【課題】対象物との距離および対象物のレーダ断面積を精度良く算出することを必要とせずに、容易かつ精度良く対象物を識別可能なレーダ装置を提供する。
【解決手段】レーダ装置1に、送信強度(電力)の異なる二つの信号11・12を所定の時間差で発生する発生部2と、信号11・12を対象物に向けて送信する送信部3と、前記対象物により反射された信号21・22を受信する受信部4と、信号21・22の受信強度(電力)の差ΔPrに基づいて対象物の種類(ヒト、車両、大型車両)を識別する識別部5と、を具備した。
(もっと読む)
物体検出装置
【課題】高反射率体の近傍に低反射率体が存在する場合でも、これら2つの物体を確実に検出することができる物体検出装置を提供する。
【解決手段】レーザレーダ装置7は、得られた受信波から物体の位置および距離を検知するとともに、受光量が閾値Ethよりも高い物体を検出して、高反射率体位置データを生成し、画像処理装置8に送信する(S101〜S107)。画像処理装置8は、画像データに高反射率体の位置をマッピングし、当該位置を中心とする所定領域を、局部画像領域に設定する(S201〜S203)。画像処理装置8は、局部画像処理領域にて低反射率体を検出するパターンマッチング処理を行う(S204)。そして、画像処理装置8は、検出した低反射率体と高反射率体の個体識別を行う(S205〜S208)。
(もっと読む)
物体検出装置
【課題】 複数のレーダにより物体を検出する物体検出装置において、検出結果を融合する際の同一物体判定や位置情報の取得精度を向上させた物体検出装置を提供する。
【解決手段】 レーダ11で検出したa、c等から検出点の進路を求め、その進路に基づいた領域(Y座標がYth1〜Yth2の領域)にレーダ10による検出点が存在し、かつ、相対速度が合致する場合に、その検出点を対応する検出点としてペアリングする。例えば、距離が離れているe−f、i−jについてもペアリング可能となる。
(もっと読む)
レーダ装置
【課題】近接する複数の低反射物体、高反射物体の速度差が大きい場合であっても、それぞれの正確な距離を測定することができるレーダ装置を提供する。
【解決手段】CPU18は、可変利得アンプ16のゲインを最大に設定してレーザ投光を指示し、受光強度をメモリ19に格納する。その後、可変利得アンプ16のゲインを低ゲインに設定してレーザ投光を指示し、受光強度をメモリ19に格納する。低ゲイン時の受光強度に最大ゲインと低ゲインの割合にあたる値を乗算し、この乗算値と最大ゲイン時の受光強度とを比較して、最大値を合成受光強度として採用する。
(もっと読む)
監視システム、制御方法、およびそのプログラム
【課題】人体と他の物体との区別を行い容易に人体を検知することができる。
【解決手段】端末機器から定期的に電磁波を放射する(S12)。検知エリアに人体が侵入してくると電磁波の反射の状態が異なってくるので、その反射波を検知し保存する(S13)。反射波は、送信された電磁波と初期の反射波と比較処理される(S14)。人体から反射された電磁波は位相がずれているので、この位相差を調べ(S15)、この位相差を検知することができれば人体であると判断し、異常状態であると判断する(S16)。次に、情報機器にその時刻、場所等の異常情報を送信する(S17)。情報機器で異常情報を受信すると(S18)、画面上に異常情報を報知画面として表示する(S19)。さらに、それらの異常情報を携帯電話に電話をして、異常状態を通報する(S20)。
(もっと読む)
481 - 500 / 687
[ Back to top ]