
Fターム[5J070AE09]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 人 (687)
Fターム[5J070AE09]に分類される特許
461 - 480 / 687
近距離測定用パルスレーダ装置

【課題】離隔位置や反射率の異なる測定対象物から得られた種々の受信パルスに基づいて距離を確実かつ正確に求めることができる近距離測定用パルスレーダ装置を実現する。
【解決手段】送信パルスSPを電波で送出する送信部20と、その反射波を受信する受信部30,40と、それに含まれる受信パルスRPと送信パルスSPとの時間差t1に基づいて距離を算出する距離演算部10とを備えた近距離測定用パルスレーダ装置において、受信パルスRPのうち少なくとも前半部分の波形を保持しうる波形メモリ11と、受信パルスRPピーク値Pを検出するピーク検出手段と、そのピーク値Pと既定の乗率nとから応変閾値Thpを算出する閾値算出手段と、波形メモリ11を参照することにより受信パルスRPが応変閾値Thpに達した時刻を検出しこの時刻に基づいて時間差t1を算出する経時算出手段とを設ける。
(もっと読む)
無線タグ検出システム

【課題】無線タグ検出システムにおいて、新たな周波数帯域を使用することなく、読取装置が無線タグから情報を読み取る際の電波と、読取装置が受信機に対して情報を送信する際の電波とが互いに干渉しないようにする。
【解決手段】以上のように詳述した無線タグ検出システム1において、読取器101は、無線タグ102,103から送り返されたタグ応答に対応したタグデータを含む読取コマンドを生成し、この読取コマンドを送信する。読取器101から送信された読取コマンドは、無線タグ102,103によりタグ応答を出力する際に用いられるだけでなく、コマンド受信機104がタグデータを取得するためにも用いられる。よって、新たな周波数帯域を使用することなく、読取器101が無線タグ102,103から情報を読み取る際の電波と、読取器101が受信機に対して情報を送信する際の電波とが互いに干渉しないようにすることができる。
(もっと読む)
物体識別装置および物体識別方法
【課題】物体から放射される電磁波の電波領域での放射強度に基づいて物体を検出して識別する物体識別装置において、環境変化や経時劣化により受信素子の感度特性が変化した場合でも精度高く物体識別を行うことが可能な物体識別装置を提供する。
【解決手段】物体から放射される電磁波の電波領域での放射強度を検出する複数の受信素子130と、受信素子130の出力信号に基づき放射強度画像を生成する放射強度画像生成部150と、放射強度画像に基づき検出した物体の位置と形状および放射強度とに基づき物体の識別を行う物体識別部200と、受信素子130に対し電波領域において電磁波を放射する放射部160と、受信素子130の出力信号が所定値以下である場合に放射部160から電磁波を放射し、受信素子130の出力信号に基づき受信素子130の感度特性が均一であるように出力信号の補正を行う出力補正部140とを備える。
(もっと読む)
物体識別装置
【課題】放射物体と反射物体とを容易に識別可能な物体識別装置を提供する。
【解決手段】物体A,Bから放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波イメージング部200と、前記電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算部300と、電波イメージング部200で生成した電波放射強度画像と画像演算部300で演算した時系列的な偏差情報に基づいて物体A,Bを認識する認識処理手段(放射量演算部400および物体認識処理部500)とを備え、前記認識処理手段は、電波放射強度画像のうち時系列的な偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から反射物体を除外することにより、反射物体と放射物体とを識別する。
(もっと読む)
共振ベースの受動応答機の位置追跡
【課題】患者の体内に挿入された物体に取り付けられた応答機の位置および方向を追跡する方法およびシステムを提供する。
【解決手段】位置追跡システムは、一つ以上のフィールド発生器を含み、フィールド発生器は、一つ以上の、個別の位置によって変化する磁界を生み出すように配置されている。応答機は、共振周波数を有し、かつ、フィールド応答要素を含む共振回路を、含み、フィールド応答要素は、一つ以上の磁界に応答して共振周波数を変えるように動作する。位置追跡器は、共振回路の共振周波数を遠隔で感知し、感知された共振周波数に応答して応答機の位置を求める、ように構成されている。
(もっと読む)
レーダ計測システム
【課題】レーダ装置を用いて移動体の相対速度ベクトルを精度良く算出する「レーダ計測システム」を提供する。
【解決手段】左レーダ装置1が計測した相対位置PLと、右レーダ装置2が計測した相対位置PRが所定レベル以上近接する場合、両相対位置を同じ点に対して計測された相対位置とみなす。そして、PLの遠近方向相対ベクトルをuL、PRの遠近方向相対ベクトルをuRとして(a)、PLからuL進んだ位置を通る、uLと垂直な直線LBLと、PRからuR進んだ位置を通る、uRと垂直な直線LBRとを求め、点QLから見た点QRの位置ベクトルが、PLから見たPRの位置ベクトルΔPと等しくなるように、直線LBL上の点QLと直線LBR上の点QRとを求め、単位時間にPLからQLまで進む速度ベクトルuを、PL及びPRが計測された点の相対速度ベクトルとする。
(もっと読む)
無線キーシステム
【課題】 低コストで、かつ高精度に、自動車外におけるキー位置を認識する。
【解決手段】無線通信部6からの無線信号の強度がしきい値以上になると、主制御部10は、前方右側検出センサ部11から後方左側検出センサ部18までを順番にミリ波信号が出力するように制御を行う。センサ受信部7が任意の検出センサ部のミリ波信号を受信すると、受信した該検出センサ部からのミリ波信号を受信したことを示す応答信号を出力する。主制御部10は、応答信号からキー側無線通信部2が受信したミリ波信号を出力した検出センサ部を特定し、その側検出センサ部から、再びミリ波信号を出力し、その反射波から、周辺物体の位置や大きさ(キー携帯者)などを計算し、キー(キー携帯者)の詳細な位置を検出する。
(もっと読む)
移動体監視システムおよび方法
【課題】複数の自由移動体を広い範囲に亘って監視する移動体監視システムを提供する。
【解決手段】送信電波の有効到達範囲以内を監視エリア10とする少なくとも1台の無指向性発信装置2から送信電波を放射し、移動体8にそれぞれ付帯された無指向性受送信装置9で受信し、送信電波の受信に応答して、無指向性受送信装置9から、自己の識別符号を根拠に呼を電波により送信し、前記呼を少なくとも1台の無指向性受信装置3で受信して通信の接続を完了し、通信の接続完了後に、通信の接続完了後に、無指向性受信装置3から前記識別符号の無指向性受送信装置9との通信の接続ができた旨の確認信号を本体制御装置1に出力する。本体制御装置1おいて、無指向性発信装置2に対して発信を指示した後、無指向性受信装置3から前記確認信号を受けた場合には移動体8が監視エリア10内に居るか否かを判断し、前記確認信号が受信不能な場合には居ないと判断する。
(もっと読む)
物体検知装置および方法
【課題】単一の距離センサのみで簡易な構成および効率的な処理によって、測距領域に侵入した検知物体の種類の正確な検出を行なうことができる物体検知装置および方法を提供すること。
【解決手段】警備装置100において、測距領域における物体を検知する測距センサ101と、検知された検知物体までの距離を算出するセンサ制御部102と、検知物体までの距離に基づいて検知物体の高さを算出する物体高算出部103と、検知物体の高さと測距領域における検知物体の幅とに基づいて検知物体の断面積を算出する断面積算出部104と、検知物体の断面積に基づいて検知物体の種類を判断する物体判断部105とを備えた。
(もっと読む)
人間携帯型爆発装置を検出するためのレーダ機器および処理方法
共偏波および交差偏波レーダ帰還信号のドップラー処理を伴う線形FMパルスレーダが、移動中の歩行者に関連する目標エコー信号内容を分離し、偏波シグネチャ解析に基づいてスタンドオフ型HCE検出用の高品質目標エコーデータを提供する。ベースバンド共偏波および交差偏波レーダ帰還信号は、多数の連続レーダ帰還パルスにわたって繰り返しかつコヒーレントに積分されて、共偏波および交差偏波レンジ対速度(ドップラー)データマップを作成する。共偏波データマップは、移動中の歩行者を識別するために用いられ、識別された歩行者に対応する共偏波および交差偏波データサブセットは、抽出されて偏波シグネチャ解析にかけられ、歩行者が爆発装置を運んでいるかどうかを判定する。積分の前の、ベースバンド共偏波および交差偏波レーダ帰還信号の低域通過フィルタリングによって、レーダ機器の明確なレンジを越える対象に関連する信号内容を拒絶するレンジエイリアシングが提供される。 (もっと読む)
アンテナ装置、監視装置、及び車輌
【課題】反射板を部分的に駆動させるだけの簡易な構成で広範囲にわたってビーム走査を実現することのできるF/B比の良好な小型で平面構造のアンテナ装置を提供すること。
【解決手段】所定の平面104内に存在する、位相差を持たせて給電される電波の第1放射源101c、101d及び第2放射源101a、101bと、所定の平面104に対向して配置された平面状の反射部105b、105aと、反射部105a、105bの一部105bを移動させて、第1放射源101c、101dと反射部105bとの間隔を変化させる移動制御部とを備える。
(もっと読む)
物体検出方法および物体検出装置
【課題】初期設定が容易でありながら、高い検出精度を得ることができる物体検出方法および物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2からの入力に基づいて得られる外界に存在する物体に関する情報に基づいて物体の検出を行うコントロールユニットCUが、前記情報を、あらかじめ設定された物体の種類とその判定に用いる情報ごとの重要度とに基づいて設定された重要度特性と照合することで物体の種類を判定する物体判定処理と、この物体判定処理における判定結果が正しい場合、前記重要度特性におけるその物体の種類判定に用いられた情報の重要度を増加させる更新処理と、を行うようにした。
(もっと読む)
UWBレーダによる共振タグの検出
検出システムは、UWB電磁放射のパルスによる照射に対する磁気共鳴応答を有する物質を検出するための受信機を有し、上記受信機は、パルスが物質と相互に作用した後にパルスを検出するための検出器(40、45)と、検出されたパルス内で物質の磁気共鳴応答を識別するように設けられた識別器(55)とを有する。磁気共鳴応答を有する物質を有するタグ(20)でタグ付けされたアイテムを、上記アイテムをUWBパルスで照射し検出されたパルス内で物質の磁気共鳴応答を識別して走査することによって、アイテムは位置づけられ、イメージングされ、又は起動されることが可能である。タグの磁気共鳴応答は、タグの起動を引き起こすことができる。タグは、異なるタグをそのシグネチャによって識別しかつ区別化できるように識別可能な磁気共鳴のシグネチャを提供するように設けられた磁気共鳴応答を有することが可能である。 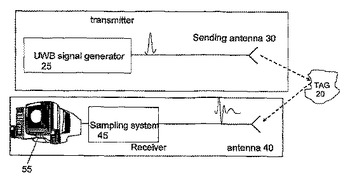 (もっと読む)
(もっと読む)
RF技術を用いた物体の追跡における低減された減衰のための方法およびシステム
無線周波数(RF)ベースの物体の識別、追跡、および位置特定のための方法およびシステム。本方法およびシステムは、より低い周波数範囲のVHFで狭帯域幅信号を使用し、伝搬損失およびRF位置特定信号の精度の低下を最小限に抑える。信号は、マスタユニットからタグまで送信される。信号移動時間が記録され、マスタとタグとの間の距離が計算される。本方法およびシステムは、VHF帯域を使用することによって、より長距離のRF信号の透過および正確さの向上を達成することができる。デジタル信号処理およびソフトウェア規定無線技術が使用される。無線によって送受信される実際の波形は、ソフトウェアによって定められる。マスタユニットおよびタグの役割は、逆にすることができる。 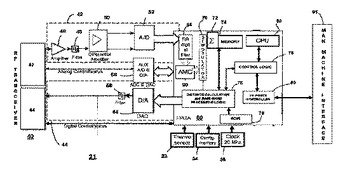 (もっと読む)
(もっと読む)
超広帯域探測信号の支援により移動物体を検出するセンサ
【課題】モニタされる領域内で移動物体、例えば人間を検出するために使用することができるセンサを提供する。
【解決手段】第1の実施形態では、本発明のセンサは、第1及び第2のアンテナと、2つの出力部が設けられ、その第1の出力部が第1のアンテナの入力部/出力部に接続され、第2の出力部が第2のアンテナの入力部/出力部に接続されたパルス発生器とを含む。センサの出力回路は、2つの検出器から成り、第1の検出器の入力部は、第1のアンテナの入力部/出力部に接続され、第2の検出器の入力部は、第2のアンテナの入力部/出力部に接続される。第1の検出器の出力部は、差動増幅器の第1の入力部に接続される一方、第2の検出器の出力部は、その第2の入力部に接続される。差動増幅器の出力部は、低周波フィルタと、出力部が差動増幅器の入力部の一方に接続されたフィードバック装置とに接続される。低周波フィルタの出力部は、コンパレータ入力部に接続される。第2の変形では、センサの入力回路は、各々に2つの入力部が設けられた2つの検出器から成る。パルス発生器の第1の出力部は、第1のアンテナの入力部/出力部と第1の検出器の第2の入力部とに接続される。第1のアンテナの入力部/出力部は、第2の検出器の第1の入力部に接続される一方、パルス発生器の第2の出力部は、遅延を通じて第2の検出器の第2の入力部に接続される。
(もっと読む)
車両の周辺監視装置、車両、車両の周辺監視方法、および車両の周辺監視用プログラム
【課題】撮像装置の撮像画像から抽出された対象物の種別の判断処理の演算処理負荷を軽減することができる車両の周辺監視装置を提供する。
【解決手段】撮像装置2R,2Lの撮像領域に存在する対象物を検出するミリ波レーダ装置20を車両10に備える。ミリ波レーダ装置20は、送信したミリ波の反射波のうち、所定強度以上の強度を有する反射波を受信し、その反射波に基づき、対象物を検出する。検出される対象物は、人などの生体以外の物体となる。撮像装置2R,2Lの撮像画像からの対象物の抽出結果と、ミリ波レーダ装置20の検出結果とを基に、対象物の種別を判断する。
(もっと読む)
位置算出システム
【課題】本発明は、固定型の位置検出装置と移動型の位置検出装置とが混在する場合であっても、ある位置検出装置で検出されたユーザの位置情報を正確に自己の座標系で表現することのできる位置算出システムを提供する。
【解決手段】本発明は、固定型の位置検出装置と移動型の位置検出装置を含む位置算出システムにおいて、ある位置検出装置が、ある時刻における自己の座標系における位置検出対象の位置を要求すると(S11)、当該時刻付近において他の位置検出装置において検出された位置検出対象の当該他の位置検出装置における座標系で検出された検出対象の位置情報を経路コストなどを考慮して座標変換順を決定し、この決定された座標変換順にしたがって座標変換することにより(S16)、自己の座標系における位置を得る。
(もっと読む)
タグ通信装置、タグ移動方向検知システム及びタグ移動方向検知方法
【課題】RFIDタグが付された移動体の移動方向を、簡易な処理により検知可能であるとともに、その移動速度が速くなっても容易に移動方向の検知が可能なタグ通信装置、タグ移動方向検知システム及びタグ移動方向検知方法を提供する。
【解決手段】スキャンアンテナ4は、送信する電波のビームMをRFIDタグ2付き荷物5が運搬されるベルトコンベア6に向けてスキャンする。RFIDタグ2からIDを読み取り、読取NO.とスキャン角αあるいはβを関連付けて測定データテーブルT2に記録するとともにプロットデータを生成する。このプロットデータをXY座標系にプロットPしてプロットグラフGを生成するとともに、このプロットグラフGから線形近似直線Lを求め、この傾き値Sから荷物5の移動方向を検知する。
(もっと読む)
物体検出方法および物体検出装置
【課題】車両以外の物体の検出を高い精度で行うことが可能な物体検出方法および物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2から画像情報と距離情報を入力して物体を検出するコントロールユニットCUが、検出対象物体との距離と、画像情報から算出したエッジの方向ベクトル、エッジの方向ベクトル分散、エッジ強度、エッジ強度分散のうちの少なくとも1つと、に基づいて対象物の種類を判定する物体種類判定処理を行うようにした。
(もっと読む)
アンテナ装置、監視装置、および車両
【課題】機械的稼動部がなく、広い範囲に複数のビーム方向を形成できる安価なアンテナ装置を提供する。
【解決手段】誘電体基板630上に形成された、それぞれ給電部を有する複数のアンテナ素子600、610と、アンテナ素子600、610のそれぞれに対向する複数の反射部を有する反射板620とを備える。各反射部は、対向する各アンテナ素子600、610と互いに平行であり、各アンテナ素子600、610のビーム方向は、各アンテナ素子600、610が形成されている誘電体基板630面を基準とする仰角に関しては、各アンテナ素子600、610と対向する反射部との距離を各アンテナ素子600、610毎に異ならせることによって、互いに異ならせている。各アンテナ素子600、610の仰角が異なるビーム方向を組み合わせることにより、広い指向性を実現している。
(もっと読む)
461 - 480 / 687
[ Back to top ]