
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
361 - 380 / 1,457
車載レーダ用アンテナ

【課題】操舵輪の影響による誤認識を防止しつつ、車両側部に配設するアンテナの位置を最適化する。
【解決手段】アンテナ10a〜10dを、サイドシルスポイラ105内に収納できる範囲でアンテナ性能を十分に発揮できるように配置する。このとき、操舵でホイール103aが外側に張り出す可能性のある前側のアンテナ〜ホイール間隔B1は、誤検出やマルチパスフェージングの影響を無くすため、レーダ波長λの4倍以上に設定する。また、アンテナ〜アンテナ間隔A1,A2,A3は、アイソレーションを取るため、レーダ波長λの2倍以上に設定する。一方、ホイールが外側に張り出すことのない後側(非操舵輪側)のアンテナ〜ホイール間隔B2は、レーダ波長λの3倍以上に設定する。これにより、操舵輪の影響による誤認識を防止しつつ、車両側部に配設するアンテナの位置を最適化することができる。
(もっと読む)
車両用異常診断装置、車両用異常診断方法、車両用異常診断装置付き車両

【課題】 制御処理手段の搭載数を少なくし、制御処理手段の異常を監視することができる車両用異常診断装置、車両用異常診断方法、車両用異常診断装置付き車両を提供すること。
【解決手段】 距離検出手段が検出した自車両と障害物との距離に基づき、制御処理手段の第2の演算周期を用いて自車両と障害物との相対速度を推定し、相対速度検出手段が検出した自車両と障害物との相対速度と、距離推定手段が推定した自車両と障害物との相対速度と、の差が設定値より大きい場合には、制御処理手段の演算周期が異常であると判定するようにした。
(もっと読む)
レーダ装置
【課題】受信アンテナの個数を多くすることなく、多くの物体の方位を高精度に検出する。
【解決手段】レーダ装置1の制御部11は、複数個の送信信号を生成し、各送信信号を、それぞれ、送信部12を介して互いに相違する領域に向けて送出する送信指示部111と、受信部13を介して、前記複数個の送信信号にそれぞれ対応する受信信号を受信し、受信された受信信号毎に、MUSIC法等を用いて、物体の存在する方位(=前記受信信号の到来する方位)を高分解能で検出する受信信号処理部114と、を備える。
(もっと読む)
車両の制御装置
【課題】車両の走行中において、先行車の検知と消費電力低減とを両立すること。
【解決手段】車両の前方の先行車を検知する先行車検知手段と、前記先行車検知手段の駆動及び駆動停止を制御する制御手段と、を備えた車両の制御装置において、前記制御手段は、前記車両が規定速度以上で走行中に、前記先行車検知手段が先行車を検知しない場合は前記先行車検知手段の駆動を停止し、その後、予め定めた復帰条件が成立した場合は前記先行車検知手段を再駆動することを特徴とする。
(もっと読む)
レーダ装置
【課題】レーダビームの上下左右方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ2と、このレーダ2と接続されたECU3とを備えている。ECU3は、レーダ2によって検出されたデータに基づいて、自車両と同一のレーンの直線路において前方正面を走行する先行車両を抽出する。そして、ECU3は、その先行車両について自車両に対する先行車両の距離及び上下左右方向がレーダ2によって所定回数検出された場合に、その所定回数検出されたデータに基づいてレーダビームの上下左右方向の角度ずれ量Δθx,Δθy(軸ずれ量)を算出する。
(もっと読む)
物体検知装置
【課題】 受信レベルが異なる二つのターゲットが並走しているとき、受信レベルが低い方のターゲットがゴーストターゲットであると誤判定されるのを防止する。
【解決手段】 ゴーストターゲット候補判定手段M5は、二つのターゲットの自車からの距離が同等であって受信レベル差が所定値以上の場合に、一方のターゲットが他方のターゲットのゴーストターゲット候補であると判定し、並走ターゲット判定手段M6は、二つのターゲットの自車からの距離変化に応じた角度差および左右位置差の変化に基づき、一方のターゲットが他方のターゲットの並走ターゲットであると判定し、ゴーストターゲット判定手段M7は、ゴーストターゲット候補のうちから並走ターゲットデータを削除したものをゴーストターゲットであると判定するので、ゴーストターゲットを精度良く判定しながら、並走ターゲットをゴーストターゲットと誤認するのを未然に防止することができる。
(もっと読む)
軸調整用ターゲット装置
【課題】車両に搭載されたレーダと撮像手段の軸調整用のターゲットを共有化する。
【解決手段】電波を送信するとともに物体により反射された反射波を受信することにより物体の位置を検知するレーダと、前記レーダの検知方向と同じ方向の画像を撮像するカメラと、を備える車載用物体検知装置に用いられる軸調整用ターゲット装置10であり、複数の起伏を等間隔に配置した電波吸収体14と、電波吸収体14の前面に設けられ表面19が略平坦に形成された電波透過体17と、電波吸収体14の前面に設けられた電波反射体20およびカメラ用のターゲット25と、を備える。
(もっと読む)
電波反射装置、及び、光軸調整方法
【課題】レーダ装置の光軸を調整するための作業スペースを縮小する。
【解決手段】電波反射装置2は、レーダ装置1と対向させて配設され、レーダ装置1から送出された電波信号を反射するものであって、レーダ装置1から送出された電波信号を反射する反射板214と、レーダ装置1の光軸と直行する方向に延設され、回動可能に配設された回転軸212と、回転軸212を回転駆動するモータ211と、を備え、反射板214が、回転軸212と直交する方向に立設されている。
(もっと読む)
車両のための運転者支援システム内の角度分解型レーダセンサにおける着氷を検出する方法
本発明は、車両のための運転者支援システム内の角度分解型レーダセンサ(10)における着氷を検出する方法であって、それぞれが特別な角度特性を有する複数のアンテナ素子(16)の信号が、対応する角度特性と比較され、アンテナ素子の信号が所定の方位角についてどのくらい良好に角度特性と一致するかを示す角度適合度(G)を用いて、測定物体の方位角(φ)が決定される、上記方法において、着氷についてのインジケータ(I)が形成され、上記インジケータ(I)は、測定物体の角度適合度(G)の単調減少関数であり、信号対雑音比が低い物体が、インジケータ(I)に対して、最大でも、低減された重み付けにより影響を与えることを特徴とする、方法に関する。 (もっと読む)
車両用外装部材およびフロントグリル
【課題】電波透過性および立体的な金属調の意匠を有し、かつ該意匠に制限のない車両用外装部材および該車両用外装部材を備えたフロントグリルを提供する。
【解決手段】レーダ装置の前方に、電波送受信経路を横切るように配置される車両用外装部材20であって、車両用外装部材20が、基材22と、レーダ装置と対向する表面とは反対側の基材22の表面に形成された意匠部(エンブレム24または擬似桟部26)とを有し、意匠部が、レーダ装置と対向する表面とは反対側の基材22の表面から突出した意匠下地部30と、意匠下地部30の表面を覆う、シリコンと金属との合金からなる光反射層32とを有する。
(もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
電波反射装置、及び、光軸調整方法
【課題】レーダ装置の光軸を調整するための作業スペースを縮小する。
【解決手段】電波反射装置2は、レーダ装置1と対向させて配設され、レーダ装置1から送出された電波信号を反射するものであって、レーダ装置1から送出された電波信号を受信する受信アンテナ21と、受信アンテナ21によって受信された電波信号を、予め設定された遅延時間ΔTだけ遅延させて、遅延信号を生成する遅延回路22と、遅延回路によって生成された遅延信号を、レーダ装置1に向けて送出する送信アンテナ23と、を備える。
(もっと読む)
軸調整装置及び方法
【課題】複数個の測距手段を搭載する車両用の軸調整施設の省スペース化を図ること。
【解決手段】軸調整用施設内に設けられ、移動体に搭載される測距手段の軸調整を行う軸調整装置であって、少なくとも2つ以上の測距手段が搭載される移動体を載せるテーブルと、前記テーブルを水平面内で移動可能に支持するテーブル可動機構と、前記テーブル可動機構を駆動制御するテーブル制御手段と、前記測距手段と位置合わせされる軸調整用の基準点を提供し、軸調整用施設内に実質的に固定される基準点構成部材とを備え、前記テーブル制御手段は、一の測距手段が前記基準点構成部材と位置合わせされた状態で該一の測距手段の軸調整処理が行われた後に、前記テーブル可動機構を介して前記テーブルを移動させ、他の測距手段が同基準点構成部材と位置合わせされた状態を形成することを特徴とする。
(もっと読む)
障害物検出装置
【課題】他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供する。
【解決手段】方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行う。
(もっと読む)
レーダ信号処理装置
【課題】目標物の検出状況に応じて目標物の検出能力を可変とし、通常の検出処理では検出できない、より小さな目標物を検出できるレーダ信号処理装置を得る。
【解決手段】目標物で反射した受信信号を受信し、受信データを出力する受信部2と、受信データに対して積分処理を実行し、積分データを出力するFFT部31、積分データを記憶する現結果保持部32および前結果保持部33、並びに追加積分要求に応じて、新たな積分データを算出する位相整合部34および合算部35を有する積分部3と、積分データのピーク位置を検出し、積分データとともに出力する検出部4と、ピーク位置および積分データに基づいて、目標物までの距離および目標物との相対速度の少なくとも一方を算出する状態算出部5と、検出部4で検出されたピーク位置の数が所定値よりも少ない場合に、積分部3に対して追加積分要求を出力する追加積分判定部6とを備えている。
(もっと読む)
物体検出装置
【課題】反射強度が低い物標を精度良く移動物体として検出することが可能な物体検出装置を提供する。
【課題手段】物体検出装置1では、ミリ波レーダ2により、左側方及び右側方に電磁波が照射され、その反射強度の分布から複数の物標が検出され、レーダ用ECU1により、自車両が走行するレーンに左側及び右側のそれぞれに隣接するレーンの有無が判定され、隣接レーンの有無に応じた抽出条件により、左側及び右側のそれぞれにおいて検出された物標から移動物体を抽出する。隣接レーンの有無により移動物体の抽出条件が変更されるので、反射強度が比較的低い二輪車や反射強度が高い四輪車を精度良く抽出することが可能となる。
(もっと読む)
物体認識装置
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
車載レーダ装置、及びターゲット認識方法
【課題】対向車からのレーダを直接受信するような強い干渉電波が生じる場合においても、干渉波の影響を最小限に抑えて、正確な測距や測角ができるレーダ装置を提供する。
【解決手段】レーダ装置の送受信部100は、アンテナ素子101と、アンテナ素子101に対する信号の位相又は振幅の少なくとも一方を調整するウエイト調整部102と、加算部103とを備え、制御部104は、アンテナ部におけるレーダの送信又は受信を切り替える送受信制御部104cと、アンテナ部が受信した干渉波を検出する干渉波検出部104aと、干渉波検出部104aにおいて干渉波が検出された場合には、ウエイト調整部102を制御してアンテナ部における指向性のヌル点の方向を調整するヌル方向制御部104bとを備える。
(もっと読む)
車両のレーダー装置の制御方法および制御装置
本発明は、車両(F1)のレーダー装置(1)の制御方法に関するものであり、送/受信ユニット(1.1)によってレーダー信号(RS)が送信および/または受信され、車両(F1)と該車両の前方に存在する対象物との間隔(DIST)が検出され、検出された間隔(DIST)に依存して、および/または無線データ伝送システムの信号(S)が検出される際に送/受信ユニット(1.1)の送信出力(P)が調整される。ここでは、最小降雨レート(RLOW)を上回るときに送/受信ユニット(1.1)の送信出力(P)が低減される。本発明はさらに、車両(F1)のレーダー装置(1)の制御装置に関する。 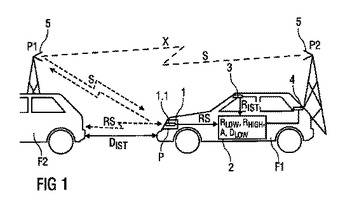 (もっと読む)
(もっと読む)
パルスドップラレーダ装置
【課題】使用形態の変更を自動的に判定して使用条件を切り替えるパルスドップラレーダ装置を提供する。
【解決手段】判定・制御部110は、使用形態判定手段111と、パルス幅選択手段112と、帯域制限幅選択手段113とを有しており、使用形態判定手段111が自車両の所定の制御装置からギア状態の信号を入力して使用形態の判定を行っている。使用形態判定手段111の判定結果に基づいて、パルス幅選択手段112および帯域制限幅選択手段113がそれぞれ広帯域インパルス生成部120および帯域幅制限部150を制御している。
(もっと読む)
361 - 380 / 1,457
[ Back to top ]