
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
281 - 300 / 1,457
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 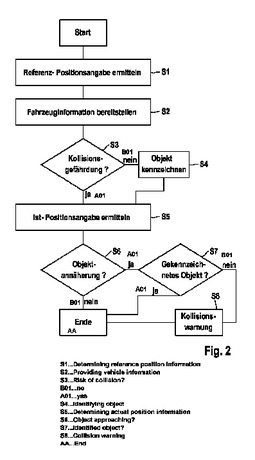 (もっと読む)
(もっと読む)
物体検出装置
【課題】レーダ装置が検出した物体について、衝突判断の対象物とする必要があるか否かの判断を適切に行うことのできる物体検出装置を提供する。
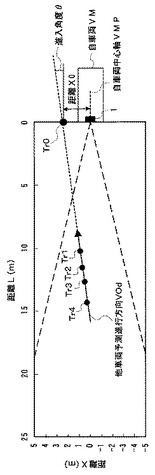
【解決手段】物体検出装置は、車両の周辺の物体を検出する検出手段と、検出手段が検出した物体について、当該物体の進行方向、当該進行方向から算出される物体の存在位置、および進行方向を示す直線と車両の中心軸とがなす角である進入角度を示す車両情報を算出する処理手段と、車両から車幅方向に沿った物体までの側方距離および進行方向を示す直線と車両の中心軸とがなす角の角度に基づいて予め設定された判定範囲を示す判定情報を記憶する記憶手段と、処理手段が算出した車両情報を用いて、存在位置および進入角度が判定範囲内であるか否かに基づいて物体を車両と衝突の危険性判断の判断対象である衝突判定対象物とするか否かを判定する判定手段とを備える。
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム

【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 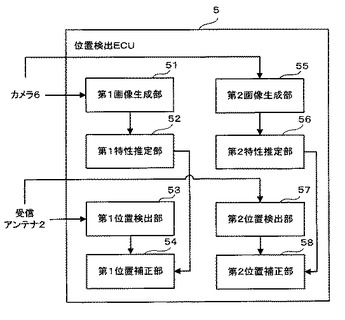 (もっと読む)
(もっと読む)
樹脂基材表面への装飾皮膜の形成方法とその装飾皮膜を有する外装装飾部材
【課題】レーダ装置のレーダビーム経路内に配設される外装装飾部材において、高価なインジウムを使用することなく、インジウムより安価な金属を用いながら、インジウムを用いた場合と同等の金属光沢による優れた意匠性とレーダビーム透過性とを兼ね備えた装飾皮膜を形成する方法を提供することを目的とする。
【解決手段】樹脂基材の表面に、300μm/h〜500μm/hの蒸着速度でアルミニウムを真空蒸着することにより、装飾皮膜を形成する。
(もっと読む)
波形観測装置及び方法
【課題】移動体を対象とした反射パルスの波形を高精度で観測することができる波形観測装置を提供する。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
(もっと読む)
物標情報推定装置
【課題】レーダ波を用いて検出される物標に関する情報(少なくとも路面からの高さ)を少ない処理負荷で検出する。
【解決手段】判定の対象となる選択物標との距離が100mより大きく(S410:YES)、且つ、中位物標のヌル距離ではない(S420:YES)場合、選択物標の受信電力がヌルポイント(外挿フラグGF=1又は前サイクルの受信電力との電力差ΔPが10dB以上)になっていれば(S430:YES or S460:YES)、その選択物標を高位物標と判定する(S440)。選択物標との距離が100m以下(S410:NO) の場合は、選択物標の受信電力がヌルポイントになっていれば(S470:YES or S500:YES)、その選択物標を中位物標と判定し(S480)、ヌルポイントになっていなければ、その選択物標を低位物標と判定する(S510)。
(もっと読む)
位相調整用集積回路および通信ユニット
無線周波信号を移相するための集積回路で、前記集積回路は、無線周波信号を受信するための少なくとも1つの入力と、電圧可変素子(315)と、電圧可変素子(315)に動作可能に結合されて、可変制御電圧(435、440)を受信するように配列されている複数の能動デバイス(305、310)とを備えている少なくとも1つの移相器(300)を備える。複数の能動デバイス(305、310)は共通ベース配列に結合されて無線周波信号を受信するように構成されている少なくとも2つの能動デバイスを備えているとともに、電圧可変素子(315)は少なくとも2つの能動デバイスのエミッタコンタクトまたはソースコンタクトを結合しているので、電圧可変素子に印加される可変制御電圧が無線周波信号の位相を調整する。 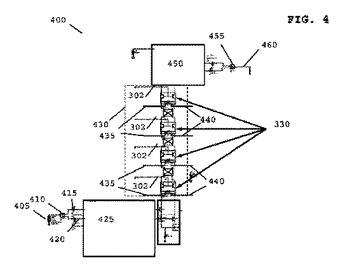 (もっと読む)
(もっと読む)
測距方法及び装置
【課題】送信波の占有周波数帯域幅が電波法で規定する76MHz以内となる条件でも、最小探知距離と距離分離分解能を短くできるようにする。
【解決手段】掃引回路18から、24.05GHz〜24.25GHzの振り幅200MHzの掃引信号を出力し、スイッチ回路20ではこの掃引信号を切取り信号を用いて周波数分割して占有周波数帯域幅50MHzの4つの信号を形成し、これを送信信号として出力する。一方、受信側では、幅50MHzの送信信号で得られた4つの受信信号を入力した位相検波器23にて、送信信号と同期した周波数帯域幅200MHzの局部発振信号で検波することで、4つのビート信号を取得する。これらのビート信号は、合成するとそれぞれの波形が連続した状態となり、占有周波数帯域幅200MHzの送信信号を用いて得られるものと同等となり、近距離の測距が可能となる。
(もっと読む)
電子的位置決め支援装置を備えた車両の誘導充電システム
【課題】
独立請求項は、計器、運動学的支援装置または機械学的支援装置なしに、ステーション側で固定された構造を有する一次コイルに対して、車両中の二次コイルを自己ガイドして電子的位置決めを確実に行うシステムに関連し、このシステムは、エネルギー消費、機能安全性および磨耗という意味合いでの移動部材、摩擦部材および弾性部材の欠点なしに、90%を超える効率でエネルギー伝送を行なうことを保証している。
【解決手段】
この本発明の目的を達成するために、ステーション側のコイル筐体は、使用材料の選択、表面および内側支持部により、電子的な筐体、反射部材および冷却部材の役割を果たし、したがって、操作準備が完了したパッケージの形態で、単体のステーション側への設置として、電気接続を備えたいずれの平坦な底面にも据え付けることができる。車両は、乗客および荷物の両方を搬送するために使用可能であり、車両の運転手により操舵可能であり、または、運転手なしに、例えば、ある領域を清掃するために、自然環境保全のために、もしくは、内部物流のために操作されうる。
(もっと読む)
レーダ装置
【課題】MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】到来波数を任意の初期値に固定しておき、この初期値に基づいて仮の到来波数を求めたのち、仮の到来波の各方位の受信パワーがスレッショルドを超えているか否か判定し、超えていないものを到来波から除くことで、実際の到来波数を求める。これにより、実際の到来波数を正確に求めることが可能となる。
(もっと読む)
レーダ装置、信号処理装置
【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】
車載レーダ装置の受信感度の低下を正確かつ迅速に検出する。
【解決手段】
車両に搭載されるとともに前記車両周囲に送信信号を送信して物標に反射された前記送信信号を受信するレーダ送受信機の信号処理装置において、前記車両に搭載された画像認識手段が前記物標の撮像画像に基づき前記物標の種別と距離とを検出し、受信感度監視手段が受信信号のレベルまたは前記受信信号から生成される信号のレベルが前記物標の距離と種別とに対応づけられた基準レベル以上であるか否かを検出するので、受信信号や受信信号から生成される信号のレベルに適切な基準レベルを適用できる。よって、受信感度の低下を正確かつ迅速に検出できる。
(もっと読む)
多重チャンネル受信機システムと多重チャンネル受信機監視方法
多重チャンネル受信機システム(10)は、第1の複数の受信回路(12、14)と、アップコンバージョンミキサー(38)とを備え、各受信回路は、第2の複数の入力ラインの対応する1つに接続された第1の入力と、局部発振信号を提供するように構成された局部発振器(28)に接続された第2の入力と、第4の複数の出力信号の対応する1つを提供するように構成された出力とを有し、各入力ラインは、第3の複数の受信信号の対応する1つを提供するように構成され、アップコンバージョンミキサーは、基準信号(42)を受信する第1のミキサー入力(40)と、局部発振器に接続された第2のミキサー入力(44)と、第5の複数の方向性結合器(48、50)にアップコンバートされた基準信号を提供するミキサー出力(46)とを有し、第5の複数の方向性結合器の各方向性結合器は、第2の複数の入力ラインの対応する1つに接続される。 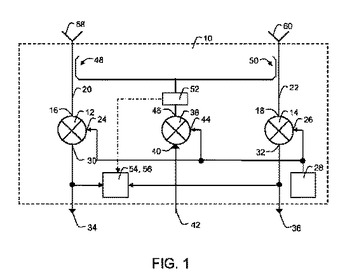 (もっと読む)
(もっと読む)
レーダ装置
【課題】レーダの反射波が飽和していても物標を適正に探知可能にすることを課題とする。
【解決手段】電波の反射波で物標を探知するレーダ装置1であって、反射波を受信する信号処理部10と、信号処理部10から得た信号をフーリエ変換して物標を探知する演算処理部2と、を備え、演算処理部2は、信号処理部10から得た信号の波形の一部が飽和している場合、飽和していない有効な部分の波形に基づいて生成した近似式を使って飽和している部分を補間し、波形を補間した信号をフーリエ変換して物標を探知する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
干渉信号補正を行うレーダセンサ
本発明は、受信信号と基準信号とを混合する混合器(12)と、当該混合器を過励振しうる干渉信号(SE)を補正する素子と、を備えたレーダセンサであって、干渉信号を補正する素子は、混合器(12)の基準入力口(18)に、調整可能な反射点(22)を有することを特徴とする、上記レーダセンサに関する。 (もっと読む)
車両用物体検知装置
【課題】 自車が衝突する可能性のない走行路上方の走行案内板を精度良く判定する。
【解決手段】 レーダー装置Rが送信した電磁波が物体により反射された反射波に基づいて物体検知手段が自車Vから物体までの距離および自車Vの進行方向に対する物体の左右方向の検知幅Wを取得し、制御対象判定手段がレーダー装置Rの出力に基づいて制御対象となる物体を判定する。このとき、制御対象判定手段は、取得された検知幅Wが予め設定された判定閾値以上であり、かつ自車Vから物体までの距離の減少に応じて検知幅Wが減少する場合に該物体を走行案内板Tであると判定して制御対象から除外するので、つまり走行案内板Tは検知幅Wが実際の左右幅Wtよりも大きく検知され、かつ自車Vの接近に応じて検知幅Wが減少することを利用し、走行案内板Tを精度良く判定して制御対象から除外することができる。
(もっと読む)
測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダ
【課題】装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置を得る。
【解決手段】測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
(もっと読む)
物体検知方法
【課題】 レーダー装置により至近距離の物体を確実に検知できる物体検知方法を提供する。
【解決手段】 検知されたターゲットと同方向で距離が2倍の位置にダミーターゲットを設定し、ダミーターゲットの位置を含む所定範囲に倍波ターゲット検知範囲を設定し、倍波ターゲット検知範囲に検知されたターゲットを倍波ターゲットとして判定し、倍波ターゲットと同方向で距離が2分の1の位置に補間ターゲットを設定し、補間ターゲットの位置を含む所定範囲に基本波ターゲット検知領域を設定し、基本波ターゲット検知領域に基本波ターゲットが検知されない場合に補間ターゲットを基本波ターゲットとして出力する。このように、検知すべき基本波ターゲットが至近距離において非検知状態になっても、依然として検知されている倍波ターゲットから算出した補間ターゲットにより基本波ターゲットのデータを推定して出力することで、基本波ターゲットを継続的に検知し続けることができる。
(もっと読む)
281 - 300 / 1,457
[ Back to top ]