
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
321 - 340 / 1,457
無線センサ装置
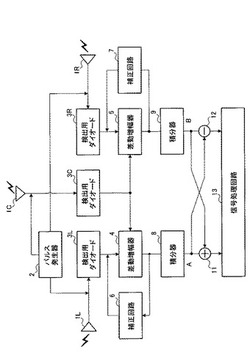
【課題】移動体の有無と、移動体が存在する場合にはその移動体の方位とを同時に検知できる無線センサ装置を提供すること。
【解決手段】第1、第2及び第3の送受信アンテナ1L,1C,1Rと、第1、第2及び第3の検出用ダイオード3L,3C,3Rと、これら送受信アンテナ1L,1C,1R及び検出用ダイオード3L,3C,3Rにそれぞれパルス信号を供給するパルス発生器2と、第1の検出用ダイオード3Lの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第1の差動増幅回路4と、第2の検出用ダイオード3Rの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第2の差動増幅回路5と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との和信号を検出する加算器11と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との差信号を検出する減算回路12とを具備した無線センサ装置である。
(もっと読む)
車両用物体検知装置

【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
車載電波パルスレーダ装置
【課題】レーダ検出性能を損なうことなく異常発生状態の検出回路をできるだけ簡便にして安価でかつ小形な構成を実現し、RF送受信回路の感度低下や、A/D変換器および信号処理回路を含めた異常発生状態を高い信頼性で検出することのできる車載電波パルスレーダ装置を得る。
【解決手段】信号処理回路14で制御されるアンプゲイン制御回路17により、RF送受信回路15に含まれる送受信アンプのゲインを所定範囲内で個別かつ任意に強制的に変化させて、RF送受信回路15内または送受信アンテナ間に存在する漏れ波の振幅を変化させる。これにより得られたIF信号を観測し、検出値と初期調整時に記憶した正常時と比較して、回路上の異常発生状態を検出する。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム
【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
車両内の運転者支援システムのためのセンサ構成
本発明は、レーダセンサ(10)とビデオカメラ(14)とを備えた、車両内の運転者支援システムのためのセンサ構成であって、レーダセンサ(10)及びビデオカメラ(14)が共通のハウジングに組み込まれる、上記センサ構成に関する。 (もっと読む)
レーダ装置およびレーダ調整方法
【課題】 車両に搭載された状態でコーナリフレクタなどの物標を用いることなくレーダのビームの出射方向を調整することができるレーダ装置およびレーダ調整方法を提供する。
【解決手段】 マイコン16は、レーダ装置1単体で、Gセンサ11によって4つの姿勢で検出した加速度を表すベクトルGp1〜Gp4に基づいて、回転軸ベクトルaおよび第1のビーム軸ベクトルB1を算出し、メモリ17に記憶する。次に、レーダ装置1を車両2に搭載した状態で、Gセンサ11によって2つの車両姿勢で検出した加速度を表すベクトルGp5,Gp6に基づいて、第2のビーム軸ベクトルB2を算出し、メモリ17に記憶する。そして、メモリ17に記憶される回転軸ベクトルa、第1のビーム軸ベクトルB1、および第2のビーム軸ベクトルB2に基づいて、垂直方向でのずれ角度θdを算出し、ずれ角度θdだけアンテナ回転軸12を中心にアンテナ10を回転して調整する。
(もっと読む)
レーダ装置
【課題】簡単な構成で、固有拡散符号で処理を行っている間および共通拡散符号で処理を行っている間に車間距離等を検出することができるレーダ装置の提供。
【解決手段】固有拡散符号で拡散する第1変調部と、共通拡散符号で拡散する第2変調部と、第1変調部で拡散された信号をレーダ波として第1の期間に送信し、第2変調部で拡散された信号をレーダ波として第2の期間に送信する送信部と、共通拡散符号で拡散された信号を干渉信号として共通拡散符号で逆拡散する第1復調部と、受信部で受信された信号から干渉信号を除去する干渉信号除去部と、干渉信号が除去された信号を固有拡散符号で逆拡散する第2復調部と、共通拡散符号で拡散された信号を当該共通拡散符号で逆拡散する第3復調部と、自車両から他車両までの距離を検出する距離検出部とを備える。
(もっと読む)
レーダ装置及びその異常検出方法
【課題】故障を的確に診断して出力信号の周波数が所定の周波数帯から逸脱するのを防止することが可能なレーダ装置を提供する。
【解決手段】レーダ装置100は、異常検出手段として、位相比較回路130と電流異常検出回路140と検波回路150とを備えている。位相比較回路130は、ミリ波発振器101から出力される高周波信号を、所定の基準信号に位相同期させてロック状態を保持させるとともに、故障等によりロック状態が解除されると、これを早期に検出してミリ波発振器101の電源を遮断することで、所定の周波数帯から逸脱した高周波信号が送出されるのを防止している。
(もっと読む)
レーダ装置及びそれを用いた電波到来方向の計測方法
【課題】レーダの検出視野内に複数の物体が存在し、それらによる反射波のドップラー周波数が同一となる状況でも、各ターゲットの方位を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】レーダで観測されるドップラー信号を、同一のドップラー周波数を発生させるターゲットごとに分類し、レーダとターゲットとの相対的な位置関係が異なる時刻の反射波のデータを平均化した相関行列を作成し、前記相関行列を用いてレーダ受信器の受信強度パターンの方位角依存性を変化させることによって、ターゲットの方位を計測するレーダ装置。
(もっと読む)
レーダ装置
【課題】対象の速度を正確に計測するレーダ装置を提供する。
【解決手段】電波を送信して、対象の距離、角度と相対速度を計測するレーダ装置において、レーダの正対方向の法線方向をXとするとき、対象の移動方向を判定する対象移動方向判定手段と、前記対象移動方向判定手段の判定結果に基づき、対象の速度を算出する対象速度算出手段を有し、前記対象速度算出手段は、前記対象移動方向判定手段により、対象がX方向に移動していると判定された場合には、対象のX方向速度を、
(V - Vs*cosθ)/sinθ(ただし、θはレーダ装置の正対方向に対する対象の角度、Vはレ
ーダで計測された相対速度、Vsは自車の速度)
で算出する。
(もっと読む)
レーダ装置
【課題】車載用などのレーダ装置を、低コストで高精度なものとする。
【解決手段】パルス内周波数拡散された送信パルスを、パルス間で周波数をステップさせて送信させ、その送信パルスの目標物からの反射を受信するレーダ装置において、送信周波数をステップさせるステップ間隔を、周波数の上限と下限を固定した3次関数となるような非線形ステップとした。また、2つの相補となる関数の加算による合成により、目標物からの反射波によるパルス信号以外の成分を抑圧可能な2つの相補信号を、同一周波数で連続する送信パルスとして割り当てるようにした。
(もっと読む)
位置検出装置
【課題】 人や物、動物といった種々の対象に適用することができ、簡易なシステム構成で、容易に位置検出できる実用性の高い位置検出装置を得る。
【解決手段】 車載機1は、小電力データ通信可能な無線部11と、無指向性アンテナ部12と、識別情報を含む信号を生成しアンテナ部12を介して全方位に電波出力させる制御部13と、送信側制御部を駆動する操作部14を有し、移動機2は、車載機1の送信電波を受信可能な高指向性アンテナ部22と、受信電界強度を検出する無線部21と、識別情報から受信電波を判別し、受信電界強度から自動車Cとの距離およびアンテナ部22の向きに応じた位置信号を出力する制御部23と、位置信号を受けて自動車Cの遠近情報を表示する表示部25と、位置表示要求信号を出力する操作部24を設ける。
(もっと読む)
FMCWレーダセンサ、及び、周波数マッチングのための方法
本発明は、FMCWレーダセンサにおける周波数マッチングのための方法であって、レーダセンサにより測定された物体をそれぞれに表し、様々な変調ランプ上で獲得される複数の周波数が、物体の間隔dと速度vとの可能な組み合わせを表す軌跡(g1〜g4)としてd−v空間(26)内に示され、様々な変調ランプ上で測定される物体を識別するために、様々な変調ランプ上で獲得される周波数に対応する軌跡間の一致(T、S)が探索される、上記方法において、最初のステップでは、一致(T)の探索がd−v空間(26)の部分空間(40)に限定され、後続のステップでは、探索がd−v空間の他の範囲へ拡大されるとともに、最初のステップで見出された物体に対応する周波数が隠されることを特徴とする方法に関する。 (もっと読む)
車両のレーダ装置用カバー
【課題】レーダの指向性の乱れが抑制された、立体形状による高い意匠性を備えた車両のレーダ装置用カバーを提供すること。
【解決手段】車両のレーダ装置用カバー1は、誘電体板を屈曲させて凹凸を設けた洗濯板状の立体形状である。誘電体板のミリ波レーダ装置2で送受信される電磁波の波面に垂直な部分である第1部分6の厚さは、それ以外の部分である第2部分7の厚さよりも薄くなっている。これにより第1部分6を透過する電磁波の量が減少するため、位相のずれの影響が相対的に低下し、レーダの指向性の乱れが抑制される。
(もっと読む)
モノパルスドップラレーダ装置
【課題】方位を含むターゲット検知データを短い周期で算出できるモノパルスドップラレーダ装置を提供する。
【解決手段】モノパルスドップラレーダ装置100は、A/D変換部126からI信号ディジタル値、Q信号ディジタル値を入力してターゲットの距離、相対速度及び方位を算出するディジタル演算処理部として、主演算処理部130と高速演算が可能な補助演算処理部140の2つを備える構成としている。補助演算処理部140では、演算量が多いプリサム処理、FFT処理、及びターゲット判定処理を行わせ、主演算処理部130では、方位算出処理を行わせている。また、主演算処理部130における方位算出処理は、ターゲット判定処理でターゲットが検出された距離ゲートおよび周波数ゲートに対してのみ行わせるようにすることで、方位算出処理で行う演算量を大幅に低減している。
(もっと読む)
特定装置、特定プログラム及び特定方法
【課題】災害等の現象が発生した領域を特定することを目的とする。
【解決手段】測定データ入力部110は、観測エリアに対して、偏波特性の異なる複数の電波が反射して得られる散乱波の少なくとも2種類の偏波成分を測定した結果であって、A時点において測定した結果である測定データAと、A時点と異なるB時点において測定した結果である測定データBとから抽出された散乱成分を、それぞれ散乱成分Aと散乱成分Bとして入力する。散乱波差計算部140は、観測エリアにおける所定の領域毎に、散乱成分Aと散乱成分Bとの差を示す散乱成分差を計算する。領域特定部150は、観測エリアのうち、散乱成分差が閾値よりも大きい領域を、所定の現象が発生した領域として特定する。
(もっと読む)
車両用レーダ装置
【課題】受信波形と基準波形との差分に基づいて測距を行う際に、車両周囲の環境が変化しても正確な測距を維持可能とする。
【解決手段】ある時点で基準波形Waを取得した後、サンプリング周期Ts毎に受信波形をサンプリングし、受信波形と基準波形Waとの差分波形を用いて測距を行う。そして、サンプリング回数nが所定回数に達したとき、受信波形と基準波形Waとの差分値の位相成分が閾値を超えているか否かを調べる。その結果、差分波形の位相成分が閾値を超えていないときには、n回目の受信波形を基準波形Wbとして取得し、この新たな基準波形Wbを用いて測距を行う。一方、差分波形の位相成分が閾値を超えているときには、現在の基準波形Waを更新せずに維持し、現在の基準波形Waによる測距を継続する。これにより、車両周囲の環境が変化しても正確な測距を維持することができる。
(もっと読む)
ピルボックスタイプ多層平行板導波路アンテナ及び対応するアンテナシステム
本発明は、波を生成する給電部と、放射部と、波を給電部から放射部に誘導できるようにするガイド部とを備える多層アンテナ30に関する。ガイド部は、平行な平面を有する少なくとも2つの積み重ねられたガイド層と、隣接する層の対毎に、スロット結合手段と係合する反射部R1を含む、隣接する層間の移行手段とを備える。ガイド部が非平面反射部を備える少なくとも一対の隣接する層に関して、スロット結合手段は複数のスロット10を含む。各スロットは、少なくとも1つの軸に沿って延びる本体を含む。スロットは、少なくとも1つの行内に配置され、合わされてパターンを形成し、そのパターンは、反射部に沿って延び、反射部の形状に応じた形状を有する。 (もっと読む)
物体識別装置
【課題】本発明は、物体の一部でセンサにより検出できない未検出領域を検出することで、物体の識別精度の向上を図ることができる物体識別装置を提供する。
【解決手段】本発明は、撮像カメラ2及びLRF3により検出された物体Aの特徴量に基づいて物体が識別対象物体であるか否かを判定する物体識別装置1において、物体Aの一部で撮像カメラ2及びLRF3によりにより検出できない未検出領域T4,T6を検出する未検出領域検出部15と、未検出領域検出部15の検出結果に基づいて、物体Aが識別対象物体であるか否かを判定する物体識別部16と、を備える。この物体識別装置1によれば、未検出領域が存在する場合に、この未検出領域を検出して区別することで、未検出領域において検出される特徴量すなわち遮蔽物等の特徴量を該物体の特徴量と誤認識することを回避し、これによって物体の識別精度を向上させることが可能となる。
(もっと読む)
321 - 340 / 1,457
[ Back to top ]